一種車載激光點云中斑馬線角點提取算法
2021-05-18 11:27:36朱二巧
遙感信息 2021年2期
朱二巧
(山東省國土測繪院,濟南 250013)
0 引言
斑馬線是城市管理與建設(shè)的重要基礎(chǔ)設(shè)施,斑馬線的自動識別與提取在城市基礎(chǔ)地理信息更新中具有重要意義,可大幅提高數(shù)據(jù)更新效率,為智慧城市的管理奠定基礎(chǔ)[1]。同時,隨著無人駕駛技術(shù)的發(fā)展,道路標線的自動識別與提取已成為剛需,因此,斑馬線角點的定位與識別就變得至關(guān)重要。車載移動激光掃描系統(tǒng)作為一種新的空間數(shù)據(jù)采集技術(shù),高度集成了衛(wèi)星定位接收機、激光掃描儀、慣性測量單元、工業(yè)相機等傳感器,具有實時、動態(tài)、主動、高精度和高密度等特點,能夠快速采集大面積的三維空間數(shù)據(jù)[2],為獲取道路坑槽信息提供了高精度的數(shù)據(jù)源。
國內(nèi)外對于道路標線的檢測正在實現(xiàn)由人工測量到車載移動測量的轉(zhuǎn)變。這種轉(zhuǎn)變大大減少了外業(yè)工作強度,可以在不影響行車安全的情況下快速獲取海量路面點云數(shù)據(jù),為公路養(yǎng)護管理提供數(shù)據(jù)支撐。
目前斑馬線的提取與識別方法可以分為3類:一是圖像檢測法[3-4],此類方法結(jié)合數(shù)字圖像處理技術(shù)分離出斑馬線像元,從而對斑馬線進行定位,但受制于圖像自身的分辨率,且精度不高;二是點云檢測法[5-7],此類方法主要根據(jù)斑馬線點云自身形態(tài)特征實現(xiàn)提取,提取效果較好,但是需要大量人工干預(yù),自動化程度不高;三是機器學習法[8-10],該方法基于現(xiàn)有的機器學習與人工智能算法自動檢測出所有符合斑馬線特征的區(qū)域,檢測速度較快但是極易受到周圍其他地物干擾,影響提取結(jié)果,很難適應(yīng)實際道路環(huán)境下的斑馬線的檢測。針對現(xiàn)有的點云檢測方法的不足,本文提出了一種基于點云掃描線的斑馬線角點精細提取算法,可快速準確地提取斑馬線角點坐標。
1 斑馬線角點提取算法
激光點云數(shù)據(jù)是一種高精度、高密度的離散數(shù)據(jù),本文提出應(yīng)用點云掃描線實現(xiàn)斑馬線邊緣點的提取,結(jié)合隨機抽樣一致性算法(random sample consensus,RANSAC)分別對斑馬線的2條長邊與短邊進行直線擬合,進而提取出斑馬線的4個角點坐標。算法流程如圖1所示。

圖1 算法流程圖
1.1 目標點云二值化
人機交互提取的目標點云內(nèi)包含斑馬線點云與非斑馬線點云。為排除非斑馬線點云對提取結(jié)果的影響,同時提高數(shù)據(jù)處理效率,本文把數(shù)字圖像處理領(lǐng)域內(nèi)的大津算法[11](OTSU)引入到點云數(shù)據(jù)處理中,計算最優(yōu)點云回波反射強度二值化分割閾值,區(qū)分斑馬線點云與非斑馬線點云。
不同的車載三維激光掃描系統(tǒng)所獲取的點云強度值存在差異,將所有點云的回波反射強度值歸一化至0~255強度區(qū)間內(nèi),歸一化計算如式(1)所示。
(1)
式中:Ki表示第i個點云的歸一化強度值;Ii表示第i個點云的原始強度值;Imax表示點云回波反射強度最大值;Imin表示點云回波反射強度最小值。
遍歷255個歸一化強度區(qū)間所對應(yīng)的強度值t,并將其作為臨時分割閾值把點云分成2個部分。點云集合內(nèi)歸一化強度值小于t的點云個數(shù)記作N0,歸一化強度值大于t的點云個數(shù)記作N1,根據(jù)OTSU算法原理分別計算上述2部分點云集合所占的比例ω0、ω1以及平均歸一化強度值δ1、δ2,在此基礎(chǔ)上根據(jù)式(2)、式(3)計算類間方差g。
δ=ω0·δ0+ω1·δ1
(2)
g=ω0·(δ-δ0)2+ω1·(δ-δ1)2
(3)
當且僅當類間方差g取得最大值時,其對應(yīng)的臨時分割閾值t即為所求最優(yōu)二值化分割閾值T。實際情況下,斑馬線為人工刷制的油漆,其點云的強度值普遍偏大,故對于目標點云集合而言,當某個點云的回波反射強度值大于T時,則認為是斑馬線點云;反之,認為是非斑馬線點云。
1.2 斑馬線長邊獲取
遍歷所有掃描線的id索引,對同一條掃描線上點云按照其X坐標或者Y坐標值升序排序。如圖2所示,在排序的同時記錄下同一條掃描線上相距最遠的2個斑馬線點云P1(x1,y1,z1)和P2(x2,y2,z2)的坐標,以計算二者的水平距離d。若當前掃描線上不存在或僅有一個斑馬線點云時,其對應(yīng)的水平距離d為0。
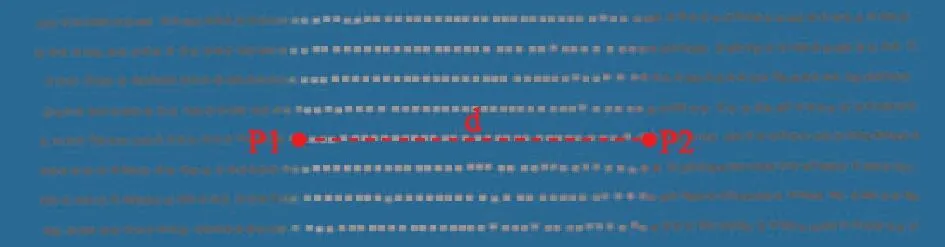
圖2 水平距離計算
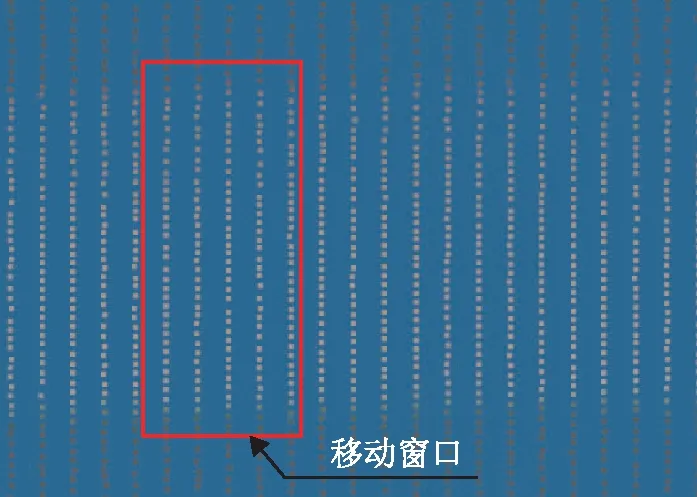
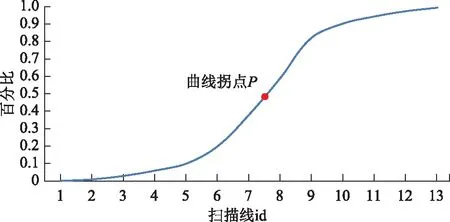
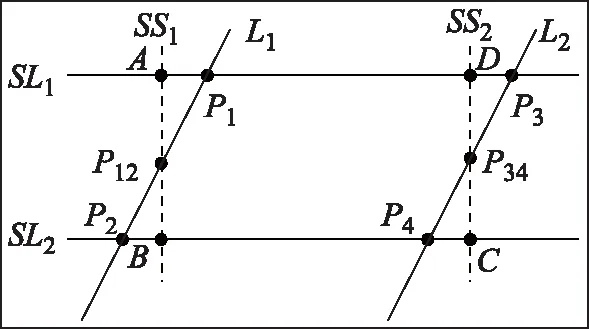
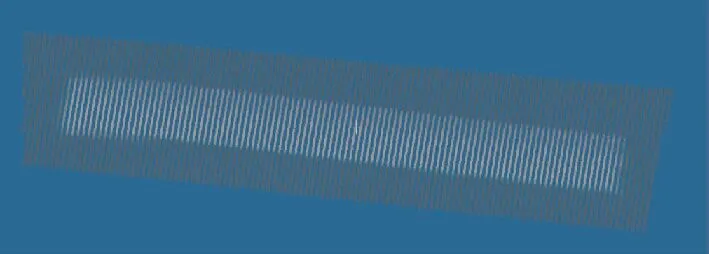
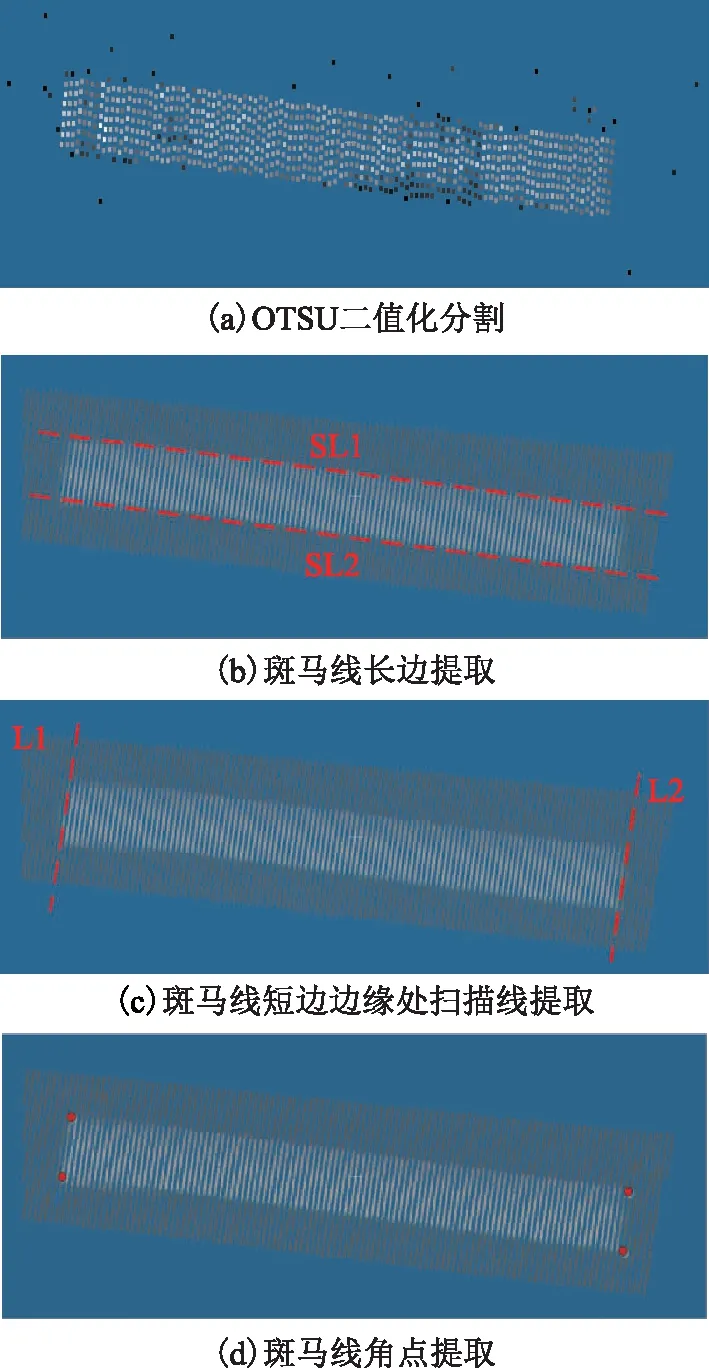
掃描線遍歷結(jié)束后得到水平距離d的取值范圍:[dmin,dmax],將上述區(qū)間等距劃分為若干小區(qū)間,統(tǒng)計落入各個小區(qū)間內(nèi)的掃描線條數(shù)。如圖3所示,對數(shù)據(jù)進行直方圖統(tǒng)計分析,生成“掃描線條數(shù)-水平距離”頻率分布直方圖。不難發(fā)現(xiàn),d值在某個小區(qū)間內(nèi)形成緊密聚類,獲取位于該區(qū)間內(nèi)所有掃描線的id索引,這些掃描線上首尾兩端處的斑馬線點云理論上分布于斑馬線長邊附近。若直接對目標點進行直線擬合,極易受到周圍噪聲點干擾,影響后續(xù)斑馬線長邊提取效果。為避免上述情況,此處使用迭代RANSAC直線擬合算法進行處理。假設(shè)原始點集為Pi{p1,p2,…,pm},經(jīng)過第一次擬合后計算所有點到擬合直線的距離hi,保留hi小于閾值的點Pj{p1,p2,…,pn}(n 圖3 頻率分布直方圖 創(chuàng)建掃描線移動判別窗口以遍歷所有掃描線,設(shè)置相應(yīng)的判別條件從而獲取斑馬線首尾邊緣處的掃描線,并對目標掃描線上的點云進行直線擬合,得到掃描線直線方程。 如圖4所示,以斑馬線長邊為約束,創(chuàng)建一個包含k條(5≤k≤8)相鄰掃描線的移動判別窗口,窗口以k條掃描線為步長并沿著掃描線索引id增大的方向移動。在移動過程中,記錄窗口內(nèi)掃描線被2條斑馬線長邊所截取部分的點云總數(shù)n以及其中屬于斑馬線點云的個數(shù)m(m (4) 圖4 移動窗口法示意圖 當掃描線被長邊所截取部分的斑馬線點云增多時,ω值變大且無限趨近于1;反之,ω值變小且無限趨近于0。當且僅當百分比ω的最大值與最小值之差近似為1時,表明該判別窗口已經(jīng)移動至斑馬線的短邊邊緣處。如圖5所示,隨著判定窗口內(nèi)掃描線編號id的增大,其對應(yīng)的百分比ω值在整體上呈單調(diào)遞增或單調(diào)遞減的變化趨勢,故此處采用三次多項式曲線擬合算法對t個離散點進行擬合,得到擬合曲線函數(shù)f(x),如式(5)所示。 f(x)=a0+a1x+a2x2+a3x3 (5) 計算f(x)的二階導函數(shù)f″(x),并令f″(x)=0得到函數(shù)拐點橫坐標x0,對x0取整即可獲取斑馬線短邊邊緣處的掃描線索引id,如式(6)所示。 (6) 移動判別窗口遍歷結(jié)束之后,理論上可以檢索得到2條短邊邊緣處的掃描線,對這2條目標掃描線上點云采用RANSAC算法進行直線擬合得到直線方程L1、L2。 圖5 三次多項式曲線擬合結(jié)果 圖6 斑馬線角點計算 為驗證本文算法的準確性,選取了實際道路某一路段點云作為實驗數(shù)據(jù),同時以實地人工測量所得的斑馬線角點坐標作為真實值進行對比分析,分別計算二者之間的點位中誤差σ與距離均方根誤差DRMS,定量分析本文算法的準確性。實驗數(shù)據(jù)如圖7所示。 圖7 實驗數(shù)據(jù) 圖8為從實驗數(shù)據(jù)中以紅色虛線框為界裁切的待處理點云,其中包含了一部分非斑馬線點云,斑馬線輪廓清晰完整,可較為精確提取4個角點坐標。僅對當前目標點云數(shù)據(jù)進行處理。圖9(a)為斑馬線點云提取圖。從圖中可以看出,根據(jù)OTSU算法計算的點云強度二值化分割閾值可以很好地區(qū)分斑馬線點云與非斑馬線點云,一定程度上克服了人工設(shè)定二值化分割閾值造成分離結(jié)果不穩(wěn)健的問題。圖9(b)中的紅色虛線SL1、SL2為本算法提取的2條斑馬線長邊。結(jié)合直方圖統(tǒng)計分析可剔除無效的掃描線,保留了位于斑馬線長邊之上的點云,對其進行RANSAC直線擬合可成功定位斑馬線長邊。圖9(c)中的紅色虛線L1、L2為本算法提取的斑馬線短邊邊緣處掃描線。原始點云中斑馬線短邊邊界不明顯,難以直接提取,本文算法基于移動判別窗口來分析斑馬線點云在相鄰掃描線上的分布特征,通過設(shè)定相應(yīng)的判別條件,從而有效提取斑馬線短邊邊緣處掃描線。圖9(d)為上述目標點云中提取的斑馬線角點結(jié)果圖。從提取圖可以看出,本算法提取的斑馬線角點與實際角點幾乎重合,可較為全面地反映出斑馬線角點的真實坐標。通過結(jié)合所獲取目標直線的幾何特征進行二次判定,可適應(yīng)多種行車環(huán)境下的斑馬線角點提取,適用于實際道路復(fù)雜多變的情況。 圖8 原始斑馬線點云 圖9 斑馬線角點提取流程 圖10為利用本文算法在實驗區(qū)域內(nèi)提取的10個斑馬線角點。以點位中誤差與距離均方根誤差為指標驗證斑馬線角點提取質(zhì)量,分別將人工提取結(jié)果與本文算法提取結(jié)果進行對比分析,分析結(jié)果如表1所示。 圖10 斑馬線角點提取結(jié)果圖 表1 斑馬線角點提取結(jié)果對比 從表1可以看出,大部分經(jīng)人工測量與本文算法提取的斑馬線角點點位中誤差在4 cm之內(nèi),整體的距離均方根誤差也達到了3.7 cm。針對不同規(guī)格的斑馬線,利用本文方法同樣可以精確提取出角點坐標,這是因為點云數(shù)據(jù)具有高精度的特征,通過掃描線分析實現(xiàn)斑馬線邊界直線的確定進而提取角點坐標的方法具有良好的適應(yīng)性。對于第6組角點,點位中誤差偏大,這是由于該斑馬線磨損程度較為嚴重,部分油漆已經(jīng)缺失無法分辨,造成角點提取錯誤。 本文以車載激光掃描點云數(shù)據(jù)為研究對象,針對城市道路上的斑馬線,充分挖掘點云自身屬性特征與三維空間分布特征,提出一種基于點云掃描線的斑馬線角點精細提取算法。算法對OTSU大津法加以改進,引入到點云數(shù)據(jù)處理中,計算最優(yōu)點云回波反射強度二值化分割閾值,實現(xiàn)斑馬線點云與非斑馬線點云的有效分離,克服了人工設(shè)定分割閾值造成分離結(jié)果不穩(wěn)健的問題。同時以點云掃描線為基本研究單位,結(jié)合頻率分布直方圖進行統(tǒng)計分析,剔除了無效的掃描線,最終保留了位于斑馬線長邊之上的點云對其進行直線擬合,成功定位斑馬線長邊,有效克服了噪聲點云干擾的問題。實際道路的情況復(fù)雜多變,車載激光掃描儀在作業(yè)過程中產(chǎn)生的掃描線不一定完全垂直于斑馬線前進方向,結(jié)合所獲取目標直線的幾何特征進行二次判定,可適應(yīng)多種行車環(huán)境下的斑馬線角點提取。實驗結(jié)果表明,本文算法能夠準確確定斑馬線角點坐標,提取結(jié)果與人工測量結(jié)果具有高度一致性。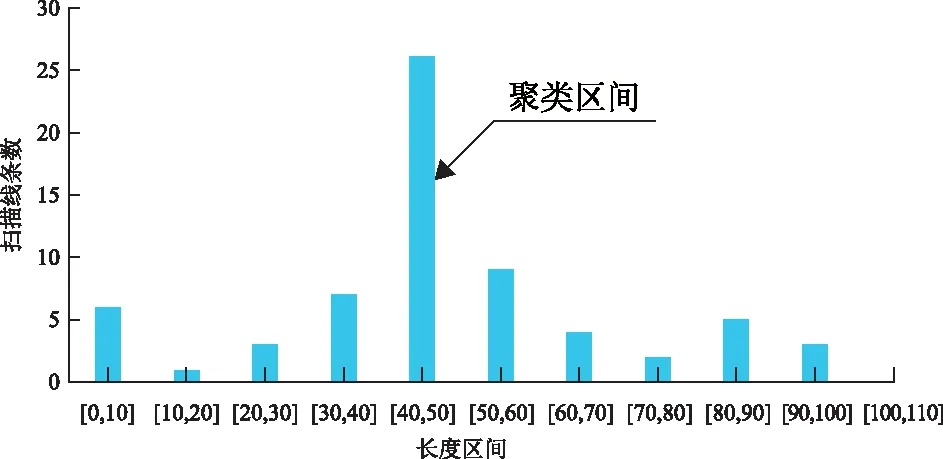
1.3 斑馬線短邊邊緣處掃描線獲取
1.4 斑馬線角點坐標提取

2 實驗分析



3 結(jié)束語