冗余噴涂機器人的帕累托優化解集流形分析
2021-05-19 17:14:10易強吳加富宋子瑜
科技資訊 2021年4期
關鍵詞:優化
易強 吳加富 宋子瑜

摘 ?要:針對冗余噴涂機器人逆運動學優化解空間難以確定的問題,提出一種基于帕累托優化解集的解流形分析方法,對噴涂機器人逆運動學解流形在解空間中的優化分布問題進行了研究。帕累托優化解集一方面將噴涂冗余機器人的解空間流形與數學中帕累托解集聯系起來,另一方面將噴涂冗余機器人的關節逆運動學拓展到數學領域的解空間流形進行研究,更易得到具有物理和幾何意義的結論。最后通過空間旋轉殼體逆運動學仿真證明了所用方法的合理性。
關鍵詞:冗余機器人 ?帕累托 ?流形 ?優化
中圖分類號:TP242.2 ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ?文章編號:1672-3791(2021)02(a)-0052-04
Manifold Analysis of Pareto Optimization Solution Set for Redundant Spraying Robot
YI Qiang1,2 ?WU Jiafu2 ?SONG Ziyu3
(1.Suzhou Ruisai Precision Tools Co., Ltd., Suzhou, Jiangsu Province, 215104 China;2.Suzhou Funaair Technology Co., Ltd., Suzhou, Jiangsu Province, 215009 China;3.School of Automation, Beijing Institute of ? ? ? ? ? ? ?Technology, Beijing, 100102 China )
Abstract: Aiming at the problem that the inverse kinematics optimization solution space of redundant spraying robots is difficult to determine, a solution-manifold analysis method based on the Pareto optimization solution set is proposed to solve the optimization distribution problem of the inverse kinematics of the spraying robot in the solution space. On the one hand, the Pareto optimization solution set links the solution space manifold of the spraying redundant robot with the Pareto solution set in mathematics, and on the other hand, it extends the joint inverse kinematics of the spraying redundant robot to the solution space flow in the field of mathematics. It is easier to get conclusions with physical and geometric significance by studying the shape. Finally, the inverse kinematics simulation of the space rotating shell proves the rationality of the method.
Key Words: Redundant robot; Pareto; Manifold; Optimization
噴涂機器人在工業應用領域越來越廣,尤其是在條件復雜,障礙物較多的工作場所一般需要關節較多的冗余噴涂機器人,而冗余噴涂機器人有無數個逆運動學解,在所有逆解中找到符合條件的最優化逆解成為冗余噴涂機器人工作中的關鍵問題[1-2]。流形是目前描述機器人逆運動學最高效的理論與方法,帕累托優化解集又是優化解流形的集中描述[3]。
該文針對旋轉噴涂工作曲面的冗余機器人,在空間流形基礎上提出算法,帕累托優化解集在李群流形基礎上分析了冗余噴涂機器人的關節構型空間優化解集,帕累托優化解集一方面將噴涂冗余機器人的解空間流形與數學中帕累托解集聯系起來,另一方面將噴涂冗余機器人的關節逆運動學拓展到數學領域的解空間流形進行研究,更易得到具有物理和幾何意義的結論[4-5]。通過MATLAB仿真得到了冗余噴涂機器人在不同臂形標志下的自運動流形仿真,最后通過噴涂殼體的仿真證明所用方法的正確性[6]。
1 ?帕累托優化流形分析
基于機器人運動關節空間的多目標優化性能泛函有如下數學描述:
(1)
式(1)中,表示為目標函數,代表冗余噴涂機器人的解空間向量,M表示為高維空間流形,該文中n=8,分別代表關節運動的下限和上限,冗余噴涂機器人解流形的多目標優化函數之間一般來說是相互沖突的,很難找到唯一的優化解,因此通過流形降維理論優化出的逆解應該是一個最優解集,數學上稱之為帕累托(Pareto)最優解集。
1.1 帕累托最優解
如果機器人解空間M中的解θ是非劣的,那么解θ屬于帕累托最優解,帕累托最優解之間沒有差別 ? ? ?關系。
1.2 帕累托所有最優解組成的集合成為帕累托最優解集
(2)
定義關節構型空間:
(3)
式(3)中,C1為移動關節構型空間,C2到C7為六自由度機械手各轉動關節空間構型,C8為旋轉空間構型,當殼體運動時,冗余噴涂機器人將會呈現出曲面流形的結構,它包括了冗余機器人的全部逆解。
定義位置關節構型空間:
(4)
定義位置關節工作空間流形:
(5)
式(5)中,low是從基座標系原點到冗余噴涂機器人腕點的矢量,,Cwl為位置關節 ? ? ?流形。
定義姿態關節構型空間:
(6)
定義姿態關節工作空間流形:
(7)
式(7)中,代表末端工具坐標系的姿態,,表示為姿態工作空間 ? ? ?流形。
2 ?流形分析優化
基于冗余噴涂機械手解流形的局部線性嵌入優化算法有如下表達。
以右上臂形位置關節空間仿真流形為例簡述流形優化的基本過程:
(1)給定樣本數據集,根據樣本數據點的歐氏距離找到每個點的k個相鄰空間,Ti為樣本數據點的k個鄰域下標集合。
(2) 得重構權值矩陣:
(8)
權值集中體現了樣本數據點θt對θi在重構數據點時的貢獻大小,如果θt不是θi的鄰近數據點,則=0。所以重構權值矩陣W是以最小二乘算法最小化每一個樣本數據點的重構誤差來實現的。針對樣本點的旋轉特點和縮放特性可以保持重構權值矩陣保持不變,為了能使重構權值矩陣的平移數據保持不變,對所有θi進行權值約束:
(9)
利用拉格朗日乘子算法可以得到重構權值矩陣W的封閉解。
(3)低維嵌入θ'的求解,算法要求其低維嵌入及其鄰近點可以反映θ空間中相對應樣本數據點的重構權值關系,即最小化損失函數:
(10)
針對加入約束:
(11)
可得:
(12)
式(12)中屬于n×n矩陣,要使代價函數取最小值,低維嵌入θ'應該取M的特征值對應的特征向量:
(13)
3 ?流形仿真驗證
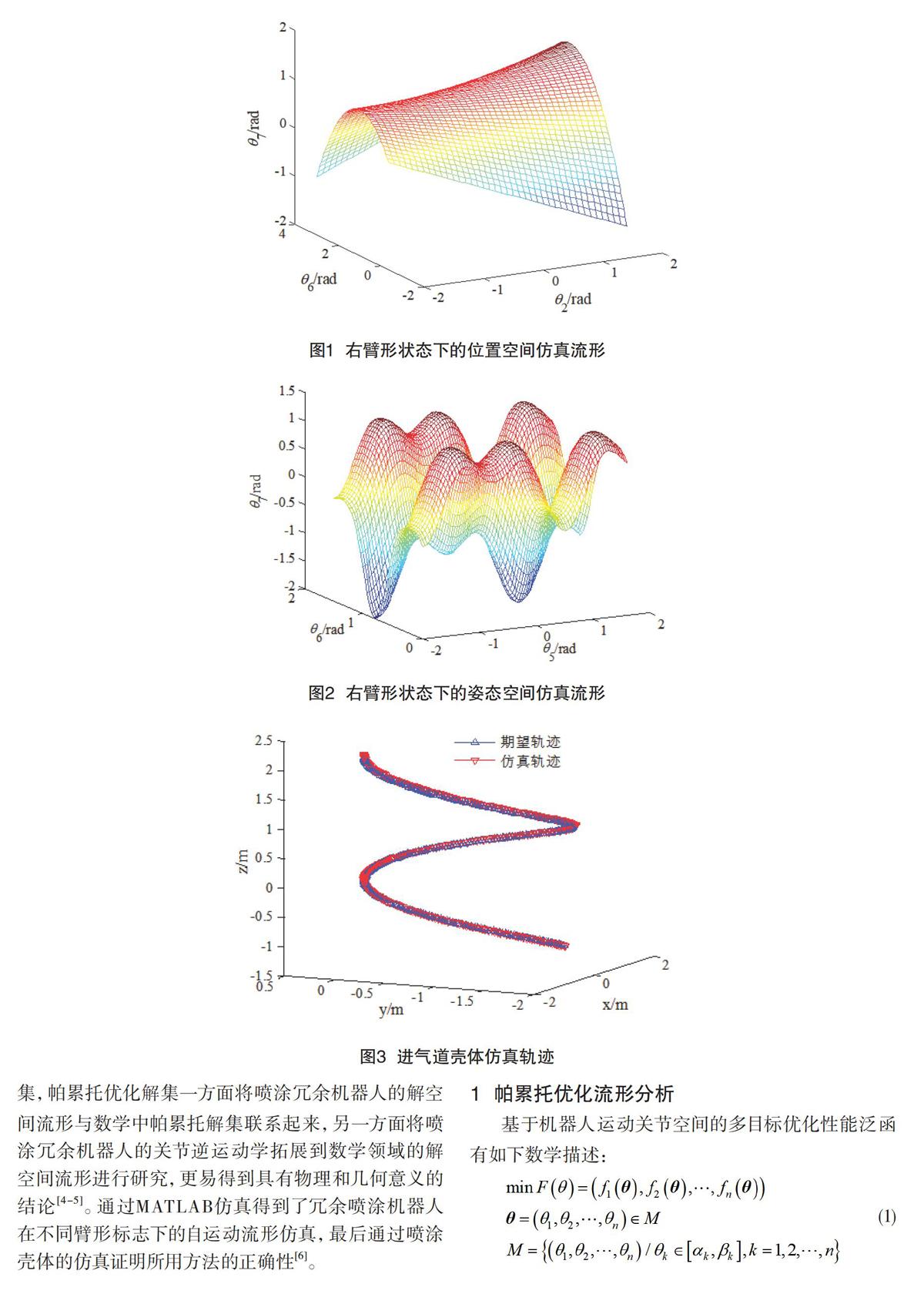
冗余噴涂機器人在各個臂形標志下都有其不同的靈活工作空間,不同的靈活工作空間對應不同的優化解流形,從而其帕累托優化解集也不一樣,考慮到右上臂形一般是噴涂冗余機器人在實際噴涂工作中所處的臂形,所以該文針對右上臂型分別在位置空間和姿態空間做了相應的自運動流形仿真,分別見圖1、圖2。
為了驗證所得流形的正確性,該文利用進氣道旋轉殼體進行仿真來驗證所得結論的正確性,進氣道旋轉殼體具有非常復雜的曲面外形,對逆解流形的計算精度有很高要求,如仿真點位和實際點位高度吻合,則證明算法是可信的,如果誤差較大則仿真曲線將會偏離實際曲線較大,具體見圖3,冗余噴涂機器人期望軌跡和仿真軌跡高度吻合,充分證明所得運動學逆解流形是正確的。
5 ?結論
本文針對冗余噴涂機器人關節空間所得位置逆解和姿態逆解,基于帕累托解集最優化理論提出一種流形優化算法,所有優化逆解構成機器人解空間的帕累托優化解集,流形優化方法主要目的在于發現嵌入在高維數據空間中的低維流形結構,數據原始幾何特性保持不變。通過仿真得到最優解集的位置關節流形和姿態關節流形。最后以噴涂殼體為例進行仿真驗證了所用方法的合理性。
參考文獻
[1]徐朋,趙東標,應明峰等.8自由度噴涂機械手的自運動流形分析[J].東南大學學報(自然科學版),2017, 47(2):254-258.
[2]裴九芳,許德章, 王海. 基于旋量理論的三指機器人靈巧手逆運動學分析[J]. 中國機械工程, 2017(24):2975-2980.
[3] Nassim A, Abderrahmane A. Boosting scores fusion approach using front-end diversity and adaboost algorithm, for speaker verification[J]. Computers and Elec Engineering, 2017, 9(2): 1-15.
[4] Krakowski K A, Machado L, Leite F S, et al. A modified casteljau algorithm to solve interpolation problems on stiefel manifolds[J]. Journal of Computational and Applied Mathematics, 2019, 311: 84-99.
[5] Meng L, Breitkopf P, Le Quilliec G. An insight into the identifiability of material properties by instrumented indentation test using manifold approach based on P-h curve and imprint shape[J]. International Journal of Solids and Structures, 2019, 106: 13-26.
[6] Sandoval J, Su H, Vieyres P, et al. Collaborative framework for robot-assisted minimally invasive surgery using a 7-DOF anthropomorphic robot[J]. Robotics and Autonomous Systems, 2019, 106: 95-106.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
