淺談工業機器人柔性系統的故障診斷
2021-05-21 08:42:10德州職業技術學院
電子世界 2021年8期
德州職業技術學院 黃 克
工業機器人作為柔性制造系統的關鍵部分,在日常運行中易出故障,此種故障非常隱蔽不易被發現,這一特點導致柔性制造系統難以普及并廣泛應用。本文采用了故障樹分析法和Petri網理論相結合的方式,并借助工業機器人故障的關聯矩陣,可以明確找出故障傳播路徑,發現工業機器人的故障位置,以便最大程度縮短尋找故障點的時間。
柔性制造系統,即“Flexible Manufacturing System”(FMS),將其應用到工業生產中,有助于提升生產效率、縮短生產周期,最大程度上減少生產成本,同時保證產品質量。因此,柔性制造系統在一定領域內得到了使用。在柔性制造系統中包含了物料系統、加工系統、計算機控制系統等。在加工系統、物料系統中,工業機器人作為其中重要組成部分,如果發生故障,則會直接影響到柔性制造系統的正常運行,影響企業正常生產。所以,需要明確工業機器人故障位置并加以有效解決,從而全面提升工業機器人在柔性制造系統中的工作效率,促進生產。
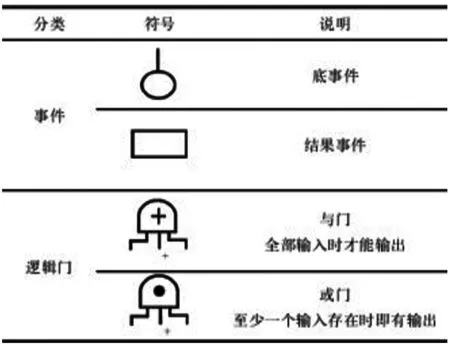
圖1 故障樹部分元件圖
1 故障樹分析法與Petri網模型
故障樹分析法(Fault Tree Analysis,FTA)屬于一種系統分析方法,其最大的特點就是邏輯性強,其主要針對系統中出現的不確定信息進行處理,圖1為故障樹部分元件。而建立在Petri網模型上的系統故障診斷方法,在診斷推理、表達邏輯關系方面展現出較強的能力。融合故障樹分析法、Petri網模型有助于提升故障診斷效率,進而實現降低成本的目的。本文融合了故障樹分析法和Petri網模型,全面分析工業機器人運行過程中容易出現的故障,在此基礎上,模擬出相應的故障傳播路徑,希望通過運用此種方法,可以更加高效的找出工業機器人故障排除方法,為后續故障維修工作提供支持。
2 關聯矩陣
為有效解決故障傳播問題還可以運用關聯矩陣,從而有效診斷故障問題,圖2是故障診斷分析流程圖,本文按照此流程對工業機器人的故障進行分析。首要任務就是構建出相應的故障樹,這就需要搜集相關信息并查閱有關的資料,為構建故障樹提供支持。與此同時,在目前故障樹模型基礎上,構建出工機器人故障的Petri網模型,通過故障關聯矩陣的作用模擬出一個故障傳播路徑;最后,計算并對該傳播路徑進行驗證。

圖2 故障診斷分析流程
Petri網在描述模型結構時可以運用矩陣運算方法實施。Σ=(P,T,F,M0)將其設定為有限P/T網,而基網N=(P,T,F)是純網,P×T→C被稱為Σ的關聯矩陣。如果XT是T→P輸出矩陣的轉置矩陣,則Y是輸入矩陣,也就是P→T的矩陣,此時在XT和Y之間會出現差C,這就是關聯矩陣:C=XT-Y。在此關聯矩陣作用下,可以實現較好的遷移,并借助一個等式進行確定,即M=M0+CU。其中的U是Σ的T變遷導致的序列,而Petri網的狀態方程,則表示為Mn+1=Mn+CU,其中Mn+1和Mn處于非常接近時,會停止運算。
3 工業機器人的柔性系統的故障診斷
通過上述的分析結合實際生產過程,不難發現,導致工業機器人發生故障,其表現形式涉及到了控制系統故障、執行系統故障等。此外,還包含了檢測傳感系統故障、氣動系統故障等。
3.1 構建故障樹
(1)減壓閥、空氣壓縮機、管道出現的故障會導致氣動系統出現故障。其中,空氣壓縮機故障的原因是進排氣口堵塞、進口溫度過高等造成的。管道系統故障是受到了管道破裂、管道堵塞的影響不能正常運作。其中導致出現減壓閥故障的原因,與閥門破裂、閘閥未開均、螺釘螺母連接松動等存在直接關系。
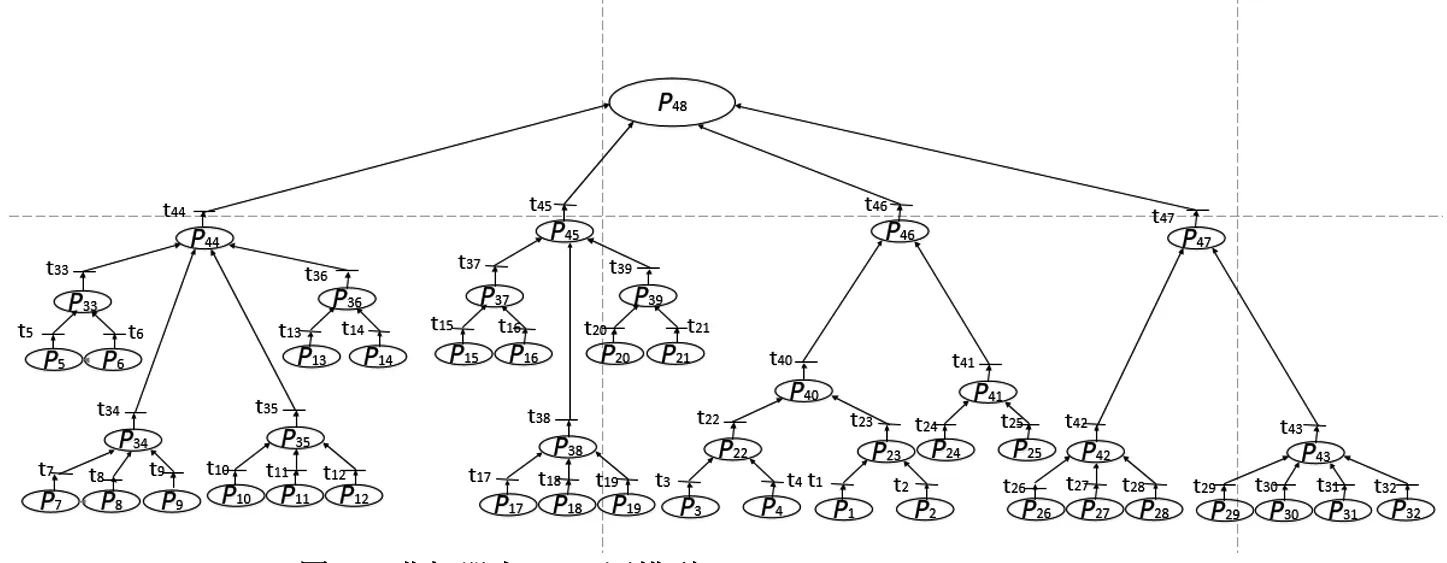
圖3 工業機器人Petri網模型
(2)在執行系統故障中,涵蓋了腕部回轉故障、手臂回轉故障等,還包含了腰部回轉故障、末端執行器故障等。其中手臂回轉和腰部回轉故障的主要表現就是發生電機、諧波減速器的損壞,同時連桿機構松動;造成腕部回轉故障是因為錐齒輪、傳動軸發生損壞、關節處螺栓發生松動等;末端執行器故障則主要是因為齒條齒輪沒有準確嚙合、驅動桿難以運作、抓取物超出承受范圍導致的。
(3)在控制系統故障中,可以劃分為硬件、軟件兩個方面的故障。其中,導致硬件系統發生故障的主要原因是因為示教模塊、六軸運動控制模塊發生故障,導致阻值偏大而導致的。而軟件系統故障的發生,則主要是因為示教編程錯誤、參數設置錯誤、速度控制失效、位置控制失效造成的。
(4)速度檢測、位置檢測兩部分故障是導致檢測系統發生故障的主要原因。如果速度檢測系統無法正常運行,會出現靈敏度較差、偏置電壓不穩的情況;位置檢測系統故障有電位器故障、旋轉變壓器故障等。
3.2 構建故障Petri 網模型
結合工業機器人故障樹構建出對應的工業機器人故障的Petri網模型,如圖3所示。
3.3 故障關聯矩陣
根據上文分析出的C=XT-Y,得出關聯矩陣C。如果初始故障表現為旋轉變壓器阻值偏大,也就是庫所P4、含有托肯,可以得出初始標識向量為:M0=(0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0)T,P4能夠被觸發,進而明確了初始標識向量U0=(0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0)T。在此基礎上,根據Petri網狀態運用Matlab軟件編寫程序,可以實施后續計算,最終得出M1、M2、M3、M4、U1、U2、U3。
3.4 故障路徑驗證
結合上述計算結果,從M0到M4的過程,在P4、P23、P40等中都有托肯以及該庫對應的故障。對于出現這一故障,工業機器人Petri網模型發生故障,則主要表現為P4、P23、P40、P46、P48。綜上可知,通過故障樹分析法和Petri網模型的綜合運用,實驗證明了故障傳播路徑與實際相符;同時,也說明了此種故障診斷技術可以應用到實際中。結語:本文通過對工業機器人柔性系統的故障診斷分析可知,此種故障診斷方法能夠及時、準確的診斷、排查出工業系統故障問題。我們可以發揮關聯矩陣的優勢,快速找出問題;同時,借助Matlab軟件的計算優勢,運用對應的擬仿真形式,對比模擬結果,進而找出相應的故障問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21