風(fēng)電場(chǎng)無(wú)人機(jī)巡檢風(fēng)力葉片姿態(tài)輔助監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
2021-05-21 08:42:10龍?jiān)措娏瘓F(tuán)股份有限公司寧夏公司艾進(jìn)才
電子世界 2021年8期
關(guān)鍵詞:檢測(cè)
龍?jiān)措娏瘓F(tuán)股份有限公司寧夏公司 艾進(jìn)才
隨著新能源技術(shù)的不斷發(fā)展,風(fēng)力發(fā)電的價(jià)值越來(lái)越受到人們的關(guān)注,因此在發(fā)電產(chǎn)業(yè)中,風(fēng)力發(fā)電逐步得到了重視,隨之?dāng)U大了風(fēng)力發(fā)電的規(guī)模,所以對(duì)風(fēng)力發(fā)電相關(guān)設(shè)備的巡檢具有重要意義,目前主要的巡檢方式是人工巡檢,這種方式存在實(shí)時(shí)性低、效率低下等問(wèn)題。于是基于無(wú)人機(jī)技術(shù)的巡檢方式逐漸在電力行業(yè)嶄露頭角。然而,利用無(wú)人機(jī)進(jìn)行風(fēng)力發(fā)電機(jī)設(shè)備巡檢時(shí),一般需要復(fù)雜算法對(duì)處于停機(jī)狀態(tài)的風(fēng)力葉片進(jìn)行姿態(tài)檢測(cè),以便于后續(xù)的圖像采集和算法處理。本文提出一種基于嵌入式的風(fēng)力葉片姿態(tài)輔助監(jiān)測(cè)系統(tǒng),可實(shí)時(shí)檢測(cè)風(fēng)力葉片姿態(tài),并將測(cè)得的數(shù)據(jù)通過(guò)無(wú)線網(wǎng)絡(luò)回傳至無(wú)人機(jī)控制中心,指導(dǎo)無(wú)人機(jī)進(jìn)行風(fēng)力葉片圖像采集,大大降低系統(tǒng)算法難度。
當(dāng)今社會(huì),經(jīng)濟(jì)和科技迅速發(fā)展,它給人們的生活帶來(lái)翻天覆地的變化,與此同時(shí),環(huán)境問(wèn)題也亟待解決。風(fēng)能作為一種新的清潔能源,人們對(duì)其的關(guān)注度越來(lái)越高,它不僅對(duì)地球生態(tài)環(huán)境友好,而且能夠在發(fā)電產(chǎn)業(yè)中作為能源被開發(fā)利用,因此在我國(guó)風(fēng)電產(chǎn)業(yè)的應(yīng)用相當(dāng)廣泛。目前,對(duì)風(fēng)機(jī)葉片的故障檢測(cè)主要由人工完成,工作人員利用相關(guān)設(shè)備對(duì)其進(jìn)行檢查和維修,如望遠(yuǎn)鏡、繩索、升降機(jī),如圖1所示。人工檢測(cè)往往缺乏一定的準(zhǔn)確性同時(shí)也存在一定的風(fēng)險(xiǎn),目前無(wú)人機(jī)技術(shù)越來(lái)越成熟,在巡檢領(lǐng)域,人們對(duì)多旋翼無(wú)人機(jī)的研究成果頗豐,隨著相關(guān)學(xué)者與專家對(duì)無(wú)人機(jī)技術(shù)的不斷研究與探索,在無(wú)人機(jī)巡檢的技術(shù)上研究出了在自主巡檢技術(shù)。風(fēng)電場(chǎng)無(wú)人機(jī)巡檢主要分為兩種,即宏觀巡檢和微觀巡檢。宏觀巡檢是指無(wú)人機(jī)按照制定的飛行路徑,通過(guò)無(wú)人機(jī)操作員或者自主飛行至風(fēng)場(chǎng)上空,進(jìn)行宏觀的圖像采集,進(jìn)而檢測(cè)風(fēng)力發(fā)電機(jī)葉片斷裂、風(fēng)塔倒塌等嚴(yán)重故障。這類巡檢方式效率高,覆蓋范圍廣。微觀巡檢是指操作無(wú)人機(jī)對(duì)風(fēng)塔進(jìn)行近距離視頻成像,主要采集風(fēng)力葉片的細(xì)節(jié)特征,例如葉片裂紋、結(jié)冰,涂層剝離等細(xì)微故障。但該種巡檢需要對(duì)風(fēng)力葉片在停機(jī)狀態(tài)時(shí)的指向、姿態(tài)進(jìn)行視覺算法的解析,無(wú)人機(jī)在成像過(guò)程中,需要對(duì)風(fēng)力葉片的圖像進(jìn)行拼接,系統(tǒng)的復(fù)雜程度較高。本文提出的風(fēng)電場(chǎng)無(wú)人機(jī)巡檢風(fēng)力葉片姿態(tài)輔助監(jiān)測(cè),主要是利用嵌入式硬件,搭載姿態(tài)檢測(cè)單元,檢測(cè)風(fēng)力葉片的停機(jī)姿態(tài),并最終通過(guò)無(wú)線通信終端,將檢測(cè)結(jié)果發(fā)送至無(wú)人機(jī)解算中心。當(dāng)無(wú)人機(jī)飛行至待檢測(cè)風(fēng)塔時(shí),依據(jù)提前解析的葉片姿態(tài),對(duì)葉片進(jìn)行圖像采集。
1 系統(tǒng)
在風(fēng)力發(fā)電機(jī)組中,風(fēng)電機(jī)是重要的組成部分,它的主要作用是收集風(fēng)能,其次進(jìn)行動(dòng)能——?jiǎng)幽艿霓D(zhuǎn)換,即將葉片空氣流動(dòng)的動(dòng)能轉(zhuǎn)換為葉片旋轉(zhuǎn)的動(dòng)能,使發(fā)電機(jī)工作而產(chǎn)生電力。隨著人們對(duì)風(fēng)電技術(shù)的研究不斷深入以及對(duì)電能需求的不斷增多,對(duì)風(fēng)電發(fā)電的設(shè)備的大小和機(jī)組規(guī)模有了進(jìn)一步的增加和擴(kuò)大。目前,風(fēng)力發(fā)電的葉片長(zhǎng)度可達(dá)到70m左右,使用壽命為30年左右,為保證風(fēng)力發(fā)電機(jī)能夠長(zhǎng)期穩(wěn)定、安全正常運(yùn)行,同時(shí)保證發(fā)電質(zhì)量良好,因此風(fēng)電公司需對(duì)風(fēng)機(jī)進(jìn)行不定期的巡檢和維護(hù)。據(jù)統(tǒng)計(jì)調(diào)查發(fā)現(xiàn),對(duì)風(fēng)機(jī)進(jìn)行保養(yǎng)和維修時(shí),其故障一方面來(lái)源于風(fēng)機(jī)電氣系統(tǒng),另外有相當(dāng)一部分的故障于風(fēng)機(jī)葉片。由于在偏遠(yuǎn)郊區(qū)、山區(qū)和近海區(qū)域風(fēng)能充足且穩(wěn)定,因此風(fēng)電場(chǎng)一般都設(shè)在這些地方以更好的利用風(fēng)能,但這些地方的地理環(huán)境復(fù)雜惡劣,對(duì)風(fēng)機(jī)葉片的工作系統(tǒng)不夠友好,缺陷故障的發(fā)生概率較高,導(dǎo)致風(fēng)機(jī)不能正常工作。
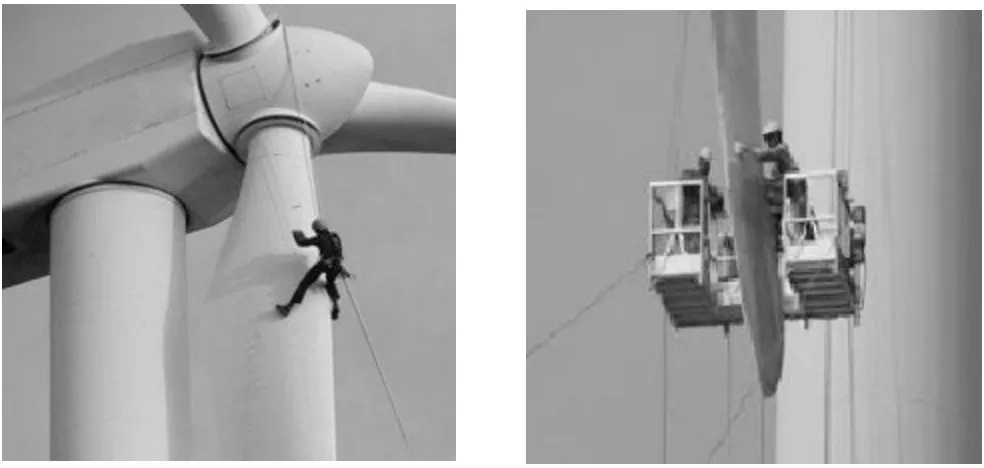
圖1 風(fēng)力發(fā)電機(jī)葉片檢修
在風(fēng)電場(chǎng)無(wú)人機(jī)系統(tǒng)中,其中巡檢目標(biāo)定位占據(jù)重要位置,它直接影響后續(xù)工作的展開。在巡檢目標(biāo)定位過(guò)程中,需要確定出相機(jī)相關(guān)的坐標(biāo)系,并對(duì)其之間進(jìn)行坐標(biāo)系轉(zhuǎn)換,通過(guò)視覺測(cè)量過(guò)算法完成對(duì)巡檢風(fēng)力葉片位置的確定,算法實(shí)現(xiàn)難度較大。本文設(shè)計(jì)的基于嵌入式的風(fēng)力葉片姿態(tài)檢測(cè)算法設(shè)計(jì),主要分為四大模塊:自啟動(dòng)模塊、姿態(tài)檢測(cè)模塊、姿態(tài)角換算模塊、無(wú)線通信模塊。其中自啟動(dòng)模塊主要是通過(guò)串行接口讀取振動(dòng)傳感器數(shù)據(jù),依據(jù)采集的振幅值判斷風(fēng)機(jī)主軸的運(yùn)轉(zhuǎn)情況。姿態(tài)檢測(cè)模塊內(nèi)部由慣性測(cè)量單元、磁傳感器等構(gòu)成,集成卡爾曼濾波算法,提供精確的方向、姿態(tài)等角度信息。姿態(tài)角換算單元是指:設(shè)備初始安裝完畢后,需標(biāo)定葉片指向與姿態(tài)傳感器數(shù)據(jù)的換算關(guān)系;無(wú)線通信模塊用于將檢測(cè)到的姿態(tài)信息遠(yuǎn)傳至控制中心,控制中心在收到風(fēng)力葉片姿態(tài)信息時(shí),將有關(guān)數(shù)據(jù)下發(fā)至巡檢無(wú)人機(jī),指導(dǎo)無(wú)人機(jī)在風(fēng)塔位置時(shí),沿著葉片方向?qū)θ~片本身進(jìn)行圖像采集,大大降低無(wú)人機(jī)圖像采集的算法難度。
本文依據(jù)慣性測(cè)量單元的方法進(jìn)行檢測(cè),其工作原理為:無(wú)人機(jī)當(dāng)前的加速度速率由一個(gè)或幾個(gè)加速度感應(yīng)器探測(cè)得到;其在方向、翻滾角度和傾斜姿態(tài)上的變化由一個(gè)或幾個(gè)偏航陀螺儀計(jì)算得到。
2 系統(tǒng)硬件設(shè)計(jì)
本文利用磁吸方式將風(fēng)力葉片姿態(tài)輔助監(jiān)測(cè)裝置安裝于風(fēng)力發(fā)電機(jī)旋轉(zhuǎn)主軸上,并在非旋轉(zhuǎn)部件上設(shè)置激光校準(zhǔn)零位點(diǎn)。當(dāng)風(fēng)力葉片旋轉(zhuǎn)式,該裝置亦隨之轉(zhuǎn)動(dòng),從而獲取實(shí)時(shí)的姿態(tài)角度,并通過(guò)無(wú)線通信單元,將實(shí)時(shí)姿態(tài)數(shù)據(jù)回傳至無(wú)人機(jī)控制中心。該風(fēng)力葉片姿態(tài)輔助監(jiān)測(cè)系統(tǒng)的中央處理器是STM32,它通常有六個(gè)組成部分,分別是IMU姿態(tài)傳感單元、功耗供能單元、IPS硬屏顯示單元、激光校準(zhǔn)單元、4G通信單元、FLASH存儲(chǔ)模塊。通過(guò)振動(dòng)傳感器獲取當(dāng)前風(fēng)機(jī)葉片的運(yùn)行狀態(tài),只有當(dāng)風(fēng)機(jī)處于停機(jī)狀態(tài)時(shí),才進(jìn)行姿態(tài)檢測(cè),以延長(zhǎng)蓄電池使用壽命。
2.1 中央處理器
中央控制器選用的處理器是STM32,CPU主頻350MHz,指令集是32,其外設(shè)接口和IO資源相對(duì)非常豐富,當(dāng)需要進(jìn)行功能的擴(kuò)展時(shí),是非常便捷的。其主要由三部分電路組成,分別是電源、仿真接口以及通訊接口,在這三部分電路中,電源電路部分一般使用的是芯片,它選用的芯片是TPS70351,它可以輸出兩種電壓,一個(gè)是1.8V,一個(gè)是3.3V,芯片內(nèi)核的工作電壓是1.8V,外設(shè)和IO引腳的工作電壓是3.3V。當(dāng)芯片工作是,會(huì)產(chǎn)生相當(dāng)大的熱量影響其正常工作,但是該芯片的散熱功能相對(duì)完善,保障芯片的溫度不超過(guò)工作溫度,使設(shè)備可以正常可靠的運(yùn)行。
因本裝置采用蓄電池供電方案,為了延長(zhǎng)該裝置的續(xù)航時(shí),控制STM32處于低功耗模式,在非巡檢時(shí)段時(shí),裝置處于待機(jī)狀態(tài),并通過(guò)繼電器回路控制相關(guān)外設(shè)處于停機(jī)狀態(tài);當(dāng)無(wú)人機(jī)開啟巡檢任務(wù)時(shí),裝置檢測(cè)到風(fēng)力葉片處于停機(jī)狀態(tài),隨即開機(jī)檢測(cè),獲取姿態(tài)數(shù)據(jù)。
2.2 IMU姿態(tài)傳感單元
選取的姿態(tài)傳感器是基于MEMS技術(shù)的,它的測(cè)量系統(tǒng)具有高性能的特點(diǎn),能夠測(cè)量物體的三維運(yùn)動(dòng)姿態(tài)。它一般由三個(gè)運(yùn)動(dòng)部分組成,分別是陀螺儀、加速度計(jì)、電子羅盤等,它們都是三軸的,將傳感器獲得的數(shù)據(jù)通過(guò)在其中嵌入的低功耗ARM處理器進(jìn)行處理,并通過(guò)溫度補(bǔ)償,得到物體的三維姿態(tài)與方位等數(shù)據(jù)。姿態(tài)傳感器獲取的物體三維姿態(tài)方位數(shù)據(jù)通常用四元數(shù)、歐拉角表示,這些數(shù)據(jù)根據(jù)基于四元數(shù)的三維算法和特殊數(shù)據(jù)融合技術(shù)獲得。姿態(tài)傳感器的已經(jīng)得到了十分廣泛的應(yīng)用,如:無(wú)人機(jī)、機(jī)器人、機(jī)械云臺(tái)、車輛船舶、地面及水下設(shè)備、虛擬現(xiàn)實(shí)、人體運(yùn)動(dòng)分析等相關(guān)產(chǎn)品設(shè)備中。本文選用微型姿態(tài)傳感器,可內(nèi)嵌于嵌入式主板,實(shí)現(xiàn)葉片姿態(tài)檢測(cè)。
2.3 IPS硬屏顯示單元
當(dāng)初次將風(fēng)電場(chǎng)無(wú)人機(jī)巡檢風(fēng)力葉片姿態(tài)輔助監(jiān)測(cè)系統(tǒng)安裝成功后,系統(tǒng)中的原始參數(shù)和姿態(tài)角可能并不滿足現(xiàn)場(chǎng)的實(shí)際情況,因此對(duì)于其參數(shù)應(yīng)該進(jìn)行重新設(shè)置。一般進(jìn)行參數(shù)設(shè)置借助于鼠標(biāo)和鍵盤,但是在輸煤現(xiàn)場(chǎng)中環(huán)境相對(duì)惡劣,鼠標(biāo)和鍵盤的使用不夠方便,因此本系統(tǒng)選用的顯示屏支持觸控操作,它是IPS電容屏,其與中央處理器的連接借助于USART串行接口,當(dāng)對(duì)其進(jìn)行二次開發(fā)時(shí),由于在其內(nèi)部部分控制功能的存在,使得中央處理器的負(fù)荷降低,因此容易對(duì)其進(jìn)行二次開發(fā)。
2.4 振動(dòng)檢測(cè)單元
本文在設(shè)計(jì)時(shí)兼具低功耗設(shè)計(jì),因此只有在風(fēng)力葉片處于停機(jī)狀態(tài)時(shí)才進(jìn)行姿態(tài)檢測(cè),因此利用振動(dòng)傳感器作為風(fēng)機(jī)是否停機(jī)的判斷依據(jù)。振動(dòng)傳感器選用常開高靈敏度震動(dòng)開關(guān)SW-18010P。它有兩種工作狀態(tài),開路OFF狀態(tài)和導(dǎo)通ON狀態(tài)。當(dāng)開關(guān)處于OFF狀態(tài)時(shí),它處于靜止?fàn)顟B(tài),當(dāng)開關(guān)處于ON狀態(tài)時(shí),往往是外力對(duì)于傳感器的觸碰而達(dá)到震動(dòng)力閾值,或者是傳感器檢測(cè)到物體的移動(dòng)速度變化而使達(dá)到離(偏)心力閾值。當(dāng)ON狀態(tài)的作用力消失時(shí),恢復(fù)為OFF狀態(tài)。
2.5 4G通信單元
因風(fēng)電場(chǎng)地處偏遠(yuǎn),采用無(wú)線通信方式最為切合實(shí)際,本文采用的無(wú)線通信模塊是基于4G的自組網(wǎng)技術(shù),在該模塊中主要集成了兩個(gè)器件,低功耗射頻收發(fā)器和微處理器,它們的使用使得在通信過(guò)程中的耗能降低,同時(shí)保障了通信質(zhì)量的穩(wěn)定,在組網(wǎng)過(guò)程中還,簡(jiǎn)單易行,操作方便,因此可實(shí)現(xiàn)點(diǎn)對(duì)點(diǎn)的數(shù)據(jù)傳輸;可組成星型和MESH型的網(wǎng)狀網(wǎng)絡(luò)結(jié)構(gòu)。可在風(fēng)塔之間實(shí)心信號(hào)的中繼,提高整個(gè)無(wú)線網(wǎng)絡(luò)的魯棒性。
小結(jié):本文設(shè)計(jì)的基于嵌入式的風(fēng)電場(chǎng)無(wú)人機(jī)巡檢風(fēng)力葉片姿態(tài)輔助監(jiān)測(cè)系統(tǒng),集成化程度高,安安裝簡(jiǎn)便,續(xù)航持久,可及時(shí)采集風(fēng)力發(fā)電葉片在停機(jī)狀態(tài)下的姿態(tài)數(shù)據(jù),并將該數(shù)據(jù)發(fā)送至巡檢無(wú)人機(jī),大大降低了無(wú)人機(jī)對(duì)風(fēng)力葉片的定位難度,為進(jìn)一步的圖像采集以及利用機(jī)器視覺實(shí)現(xiàn)葉片缺陷檢測(cè)奠定了基礎(chǔ)。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48