地外天體超聲波鉆探器研究與應用綜述
2021-05-24 07:31:38王童照全齊全黃江川唐德威孟林智趙志軍鄧宗全
宇航學報 2021年4期
王童照,全齊全,黃江川,唐德威,郭 璠,孟林智,趙志軍,鄧宗全
(1. 哈爾濱工業大學機器人技術與系統國家重點實驗室,哈爾濱 150001;2. 中國空間技術研究院,北京 100094;3. 北京空間飛行器總體設計部,北京 100094)
0 引 言
在未來深空探測任務中,采樣作為一個重要環節是獲取星體信息最直接的方式。星體的表層物質受宇宙風、塵暴和流星撞擊等影響嚴重,所保留的星體原始物質信息較少;星體次表層的物質受外界環境影響較小,更有利于獲取有價值的信息,對研究太陽系星體演化規律和人類生命起源具有重要意義[1-3]。鉆探采樣是獲取星體次表層地質樣品的有效途徑之一。通過鉆進取芯的方式可以獲取保留完整地質層序信息的樣品[4]。然而在星體表面實施鉆進任務時面臨鉆探環境惡劣和引力微弱的環境特點,鉆探采樣對鉆機提出了環境適應性強、低功耗和低軸向力的要求。壓電驅動的超聲波鉆探器可以滿足這些要求,超聲波鉆探器具有所需鉆壓力小、結構簡單、功耗低、耐溫范圍寬(-200 ℃~500 ℃)和無需潤滑等突出優點[5],比傳統電磁電機驅動的鉆探器更適用于微弱引力下星體的鉆探采樣任務。
目前,國內外研制的超聲波鉆探器依據作動方式主要分為三類:直驅式超聲波鉆探器、沖擊式超聲波鉆探器和回轉沖擊式超聲波鉆探器。直驅式超聲波鉆探器研究最早,由美國噴氣推進實驗室(Jet Propulsion Laboratory, JPL)提出,驗證了適應于火星環境的超聲波鉆探器具有低功耗、低鉆壓和耐溫范圍寬的工作特點[6]。沖擊式和回轉沖擊式超聲波鉆探器在直驅式超聲波鉆探器的研究基礎上致力于提高鉆進取芯效率,受到了廣泛的研究,被定位于協助星體探測器和漫游車的鉆探平臺[7]。超聲波鉆探器作為鉆探平臺對星體探測具有重要意義,主要體現在:1)超聲波鉆探器所需鉆壓力小、功耗低可以極大地節省探測器的能源;2)超聲波鉆探器對不同硬度的硬脆性介質均具有很好的可鉆性,這增加了采樣地點選擇的多樣性;3)超聲波鉆探器可以產生完整的異型孔有助于實現十米左右的鉆進深度;4)超聲波鉆探器自身的聲納傳感特點能夠實現鉆進過程的鉆探一體化。
苛刻的空間環境對超聲波鉆探器技術研究具有極大的挑戰[8-9]。月球表面溫度-233 ℃~180 ℃、火星表面溫度-120 ℃~35 ℃、小行星表面溫度-188 ℃~120 ℃、金星表面溫度465 ℃~500 ℃,星體表面存在的高低溫環境對超聲波鉆的諧振頻率和各部件之間的力學性能產生巨大影響[10-11]。星體表面的介質硬度不確定,這要求超聲波鉆探器能夠適應不同硬度等級的介質。在鉆進過程中可能面臨地質層結構的變化,這要求超聲波鉆探器需要針對被鉆介質的變化及時調整鉆進參數以保證鉆進穩定性。星體表面往往還存在著真空、強酸和宇宙輻照等苛刻環境,這些對超聲波鉆探器的影響還尚不清晰。
本文基于國內外已有的超聲波鉆探器的研究進展,分析各超聲波鉆探器方案的特點和存在的不足。同時,對超聲波鉆探器的各部件間動力學仿真模型、結構優化成果、驅動電源控制方法進行分析與討論。并基于在未來深空應用中的預研成果對超聲波鉆探器研制過程中的關鍵問題給出一些具體建議。
1 超聲波鉆探器研究進展
超聲波鉆探器在1998年由JPL首次提出以來,主要作為地外天體探測的鉆探平臺被廣泛研究。JPL開發了多種構型和功能的超聲波鉆探器,并對其性能進行了不斷優化。歐洲和俄羅斯的學者對超聲波鉆探器的性能提升和非線性動力學分析方面也做了大量的工作。同樣,超聲波鉆探器也吸引了國內學者對其進行深入研究。以下將分別探討各科研機構對超聲波鉆探器的研究進展。
1.1 美國噴氣推進實驗室
JPL創新性的提出超聲波鉆探器的概念,以低功耗和環境適應性強為設計目標,開發出了第一代直驅式超聲波鉆探器(Ultrasonic Core Driller, UTCD),發現了它比傳統鉆機具有低功耗、低鉆壓力和耐高低溫的突出優點。但是由于UTCD的鉆進速度較慢,在JPL后續的研究中提及較少。為了進一步提高UTCD的鉆進速度,Bar-Cohen等[12]在壓電換能器與鉆桿之間引入自由質量塊,研制出了沖擊式超聲波鉆探器(Ultrasonic/Sonic Drilling/Cori-ng, USDC)。自由質量塊將壓電換能器傳遞的20 kHz超聲頻振動轉換為60~1000 Hz聲波的組合,激勵鉆桿鉆進巖石內部。整個鉆進過程中孔的形狀保持完整,通過改變鉆頭的形狀可以得到不同的鉆孔形狀,這一獨特的孔型保持能力也是優于傳統鉆機之處。自由質量塊的引入使得超聲波鉆探器的鉆進速度得到大幅提升,這也使USDC成為超聲波鉆探器廣泛研究和應用的原型。USDC鉆進實驗如圖1所示,鉆壓力5 N,功耗5.3 W時,在砂巖上的鉆進速度為2.4 mm/min。在鉆進過程中只需要單手扶持鉆機的電源線即可[13-14]。
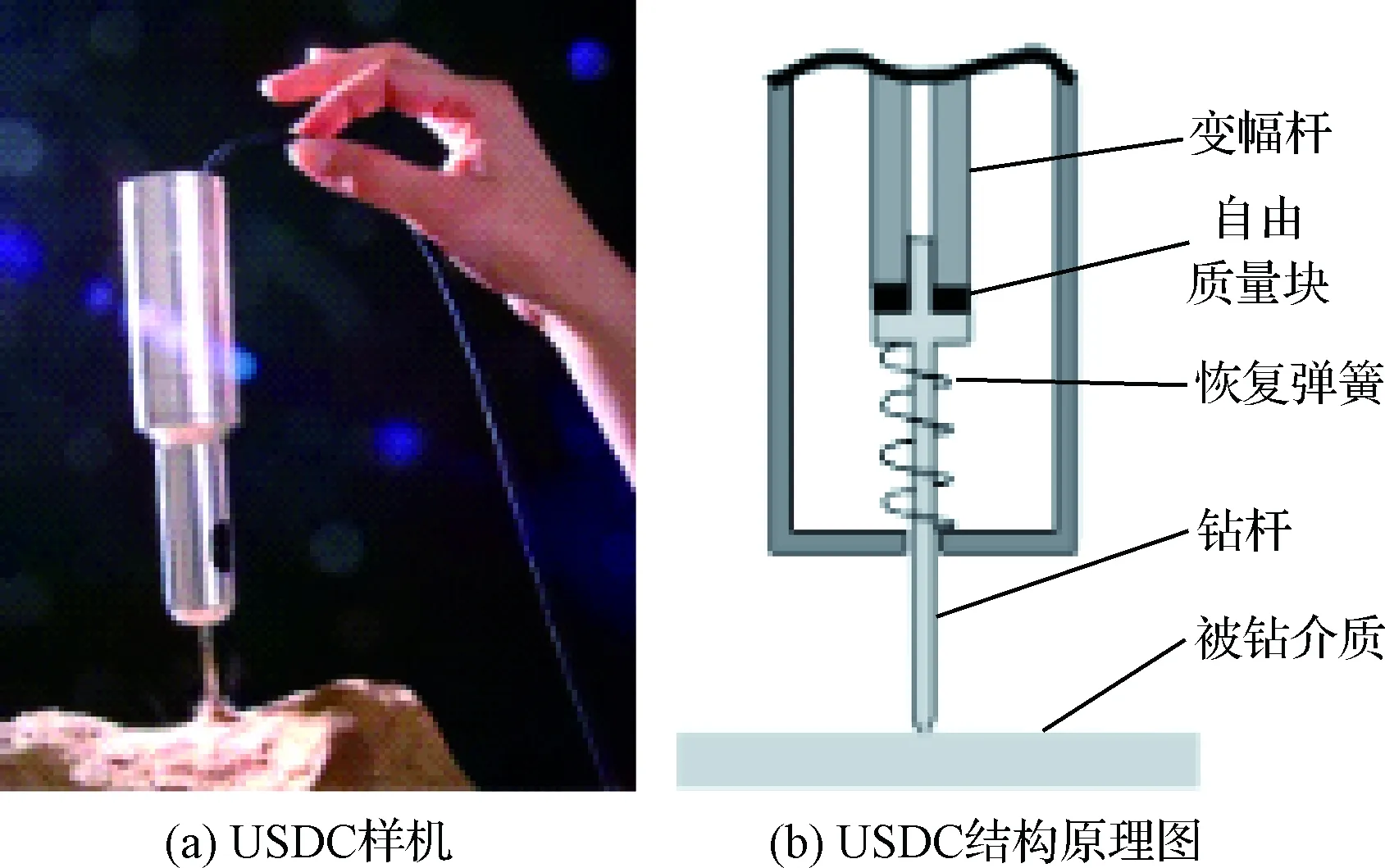
圖1 JPL研制的USDC與結構原理圖[13-14]Fig.1 USDC developed by JPL and its schematic structure[13-14]
雖然USDC的鉆進速度得到了提升,但是存在排屑困難的問題。隨著鉆孔深度增加,產生的鉆屑很難及時排除,這對鉆進穩定性和深度取芯將造成不利影響。為了獲取火星、木衛二、土衛二地表冰層以下有一定深度的樣品,JPL在USDC的基礎上又開發了Ice-Gopher沖擊式超聲波鉆探器[15]和Auto-Gopher-Ⅰ和Auto-Gopher-Ⅱ回轉沖擊式超聲波鉆探器[16],在冰面的鉆進深度可達30 m。Auto-Gopher系列的超聲波鉆探器由沖擊破碎被鉆介質的USDC和驅動鉆桿回轉的同軸電磁電機兩套系統組合而成,具有自動斷芯、取芯、送芯、嵌入電子儀器和自動故障診斷五種功能[17]。Auto-Gopher系列在實驗測試中深度取芯性能表現突出,但是電磁電機驅動回轉的方式增加了裝置的復雜性,這對降低探測器載荷質量是不利的。由此,JPL探索了利用單壓電陶瓷疊堆驅動變幅桿前端既實現沖擊又實現回轉以簡化Auto-Gopher系列的結構,并研制了一套Single Piezo-Actuator Rotary-Hammering Drill(SPaRH)原理樣機[18],但是仍然存在變幅桿縱振與扭振的強耦合作用使得鉆桿的回轉運動不連續問題,降低了能量傳遞效率。鉆壓力3 N、功耗100 W時,SPaRH在砂巖上的鉆進速度為8 mm/min。
1.2 格拉斯哥大學
格拉斯哥大學也進行了直驅式、沖擊式和回轉沖擊式三種超聲波鉆探器類型的研究。2008年,提出在階梯型縱振壓電換能器上通過切斜槽方式增加扭轉振動以提高直驅式超聲波鉆探器的鉆進速度,研制了兩種壓電換能器:一種是在變幅桿大徑端切斜槽實現縱扭模態耦合,另一種是在變幅桿小徑端切螺旋槽實現縱扭模態退化[19]。研究指出當需要縱扭分量均較大時采用模態退化型設計,需要突出縱扭復合中的某一種振動分量時采用模態耦合型設計。由于這兩種壓電換能器與鉆桿緊密連接,相比JPL研制的SPaRH改善了鉆桿縱扭運動不連續的缺點,但是仍然存在扭振能量雙向傳遞的問題,從而造成換能器額外的溫升和疲勞。為克服這一問題,2009年提出在壓電換能器的變幅桿前端周向加工三層徑向斜槽孔洞的方案[20-21]。通過控制斜槽孔洞的孔柱分布方向有效克服了扭振的雙方向傳遞問題,使振動能量集中在變幅桿前端。優化后的鉆探器在鉆壓力12 N、功耗40 W時,達到鉆進速度2.2 mm/min,雖然鉆速較慢,但其作動方式具有很好的借鑒意義。
2010年,在對沖擊式超聲波鉆探器的改進研究中,借助ANSYS軟件探討了壓電換能器的中空結構和自由質量塊的數量對取芯速率的影響,發現使用階梯型實心壓電換能器的取芯效果優于狗骨型空心換能器,布置單一自由質量塊時可以獲得理想的有效沖量[22]。此外,針對沖擊過程中變幅桿前端易發生疲勞破壞問題,采用增加硬質金屬保護層的措施,研究了保護層對軟化效應、滯回效應等非線性因素和鉆進速度的影響。
在回轉沖擊式超聲波鉆探器的研究中,提出了三種新構型。2011年,研制了一種由電磁電機激勵鉆桿回轉的超聲波鉆探器,鉆桿與電磁電機同軸布置并通過花鍵連接[23]。同時提出了第二種新構型的設想,但是沒有研制樣機進行實驗驗證。即利用凹槽結構將變幅桿前端產生的縱振和扭振能量分離[24]。鉆桿的縱向運動由沖擊頭縱向沖擊自由質量塊產生,扭轉運動由一個可移動的內六角套筒布置在凹槽柱與鉆桿之間依靠摩擦轉子傳遞。縱扭運動分離的想法具有很大研究價值,它避免了縱扭同時驅動自由質量塊時導致的鉆桿回轉不連續問題。2018年,開發了第三種由電磁電機激勵的超聲波鉆探器(Ultrasonic planetary core drill,UPCD),鉆桿與電機平行布置并通過齒輪機構連接,最優鉆速達到6.2 mm/min。Li等[25]希望獲得全波長換能器與半波長換能器對UPCD有效沖量和鉆進速度影響的區別,如圖2所示,但是通過仿真與實驗研究均未獲得二者之間的明顯差別。
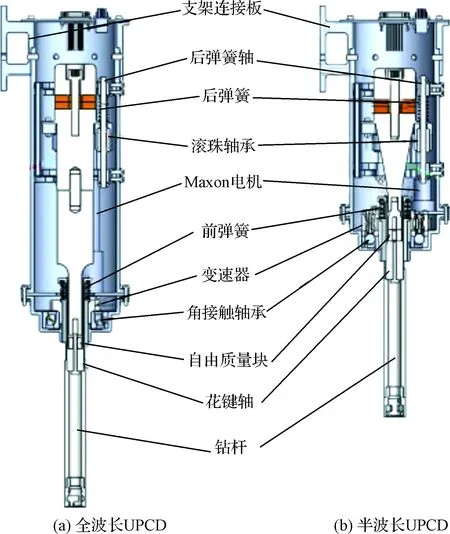
圖2 格拉斯哥大學研制的回轉沖擊式超聲波鉆探器[25]Fig.2 Rotary-percussive ultrasonic drills developed by UOG[25]
1.3 俄羅斯比斯克超聲技術中心
俄羅斯比斯克超聲技術中心研制的超聲波鉆探器以直驅式為主。2012年,為了提升脆性和硬質材料的鉆進取芯自主性,依據鉆桿的類型先后提出了兩種直驅式超聲波鉆探器[26]:被動型和主動型。被動型鉆桿在深度鉆孔時存在鉆桿外壁碰撞鉆孔和磨料不方便注入問題,而主動型鉆桿可以通過內腔注入磨料液,且主動型鉆桿設計為階梯型避免了在鉆進過程中與鉆孔之間的碰撞。被動型鉆桿和主動型鉆桿均可以通過螺紋連接、夾頭加緊和焊接三種方式緊密安裝在壓電換能器上。但為了保證傳遞到鉆具的振幅強度,只有鉆桿直徑大于3 mm時才可以選擇夾頭加緊和焊接鉆桿的方式。
2013年,與俄羅斯科學院空間研究所合作研制了面向月壤取芯的直驅式超聲波鉆探器,重點研究了鉆頭的端面振幅和摩擦溫升對鉆進取芯過程的影響[27]。由于取芯時鉆桿的溫升會影響地質樣品的真實信息,采取在壓電換能器和鉆桿之間增加多個半波長波導管的形式避免壓電陶瓷的熱量向鉆具傳遞。具有一定長度的波導管也有助于實現月面次表層樣品的采集。該鉆探器可以在模擬月面溫度-130 ℃環境下工作15 min后仍然保持鉆桿表面溫度在0 ℃以下。除此,為了實現在鉆進深度增加的同時對破碎的介質進行原位分析,提出了中心結構為錐形、四周分布通孔的特殊鉆頭[28],并研究了該鉆具與泡沫混凝土、水沙混合物、油沙混合物在鉆進過程中的溫升和阻尼特性。
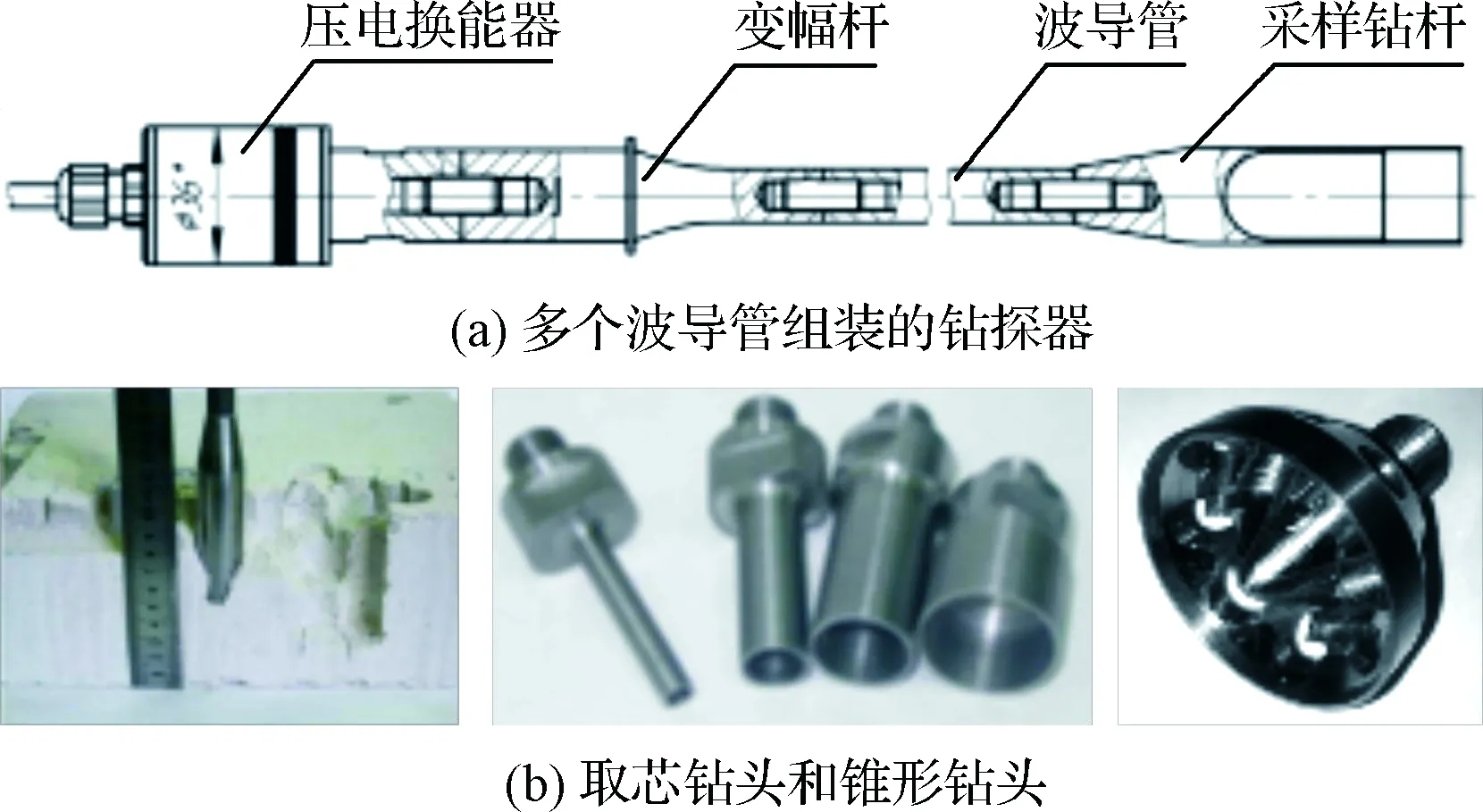
圖3 用于模擬月壤采樣的超聲波鉆探器[26-28]Fig.3 Ultrasonic equipment for the intake of Lunar soil[26-28]
1.4 帕德博恩大學
帕德博恩大學主要針對沖擊式超聲波鉆探器做了動力學建模和結構參數優化的研究。2006年,帕德博恩大學提出一種基于自適應細分技術面向集合的數值方法用于求解不規律或混沌系統周期解[29]。該方法可以快速獲得沖擊式超聲波鉆探器整體動力學的信息,有助于分析自由質量塊的混沌動力學行為,指導壓電換能器的諧振頻率設計、自由質量塊的參數選型,評估鉆桿的鉆進特性。
由于傳統圓盤形的自由質量塊在碰撞運動時嚴重晃動,無法對測試的自由質量塊接觸信號進行有效分析。2007年,帕德博恩大學研制了一種由8 mm直徑鋼珠代替圓盤形自由質量塊的沖擊式超聲波鉆探器[30],如圖4所示。為了定量描述該超聲波鉆探器的換能器端面振幅、激勵頻率和自由質量塊的質量,采用有限元方法和具有黏彈性Kelvin-Voigt元素的離散模型方法建立了沖擊式超聲波鉆探器的整機動力學模型[31]。但是,該模型中忽略了壓電換能器本體質量的影響。壓電換能器的本體質量是準確分析變幅桿有效沖量的關鍵因素。
圖4 帕德博恩大學研制的超聲波鉆探器[30]Fig.4 Ultrasonic drills developed by Paderborn University[30]
1.5 英國Magna Parva公司
面向未來在火星上實現次表層樣品取芯任務,英國Magna Parva公司和歐空局于2006至2009年合作開發了一套直驅式超聲波鉆探器(Breadboard-Ultrasonic Drill Tools, BB UDTs)和一套回轉沖擊式超聲波鉆探器(Engineering Model Ultrasonic Drill Tools, EM UDTs)[32]。研究了BB UDTs的三種安裝方式:在機械節面處的無約束、固定約束和彈性約束。鉆進試驗表明,通過彈簧連接放開自由度的彈性約束可以獲得良好的鉆進效果。同時,還發現在鉆具與鉆進介質相互作用表面存在顆粒介質時會降低鉆進速率,以及冰塊的局部融化會增加鉆進效率。
在BB UDTs的基礎上研制了能夠滿足火星探測任務需求和組裝性能較好的工程樣機EM UDTs。EM UDTs的電磁電機與超聲波鉆探器同軸布置,通過電機轉軸與切削刃的柱塞連接實現鉆具回轉。切削刃的柱塞在活塞缸和記憶合金封閉環的作用下可以沿鉆機軸向運動,有助于實現鉆探器的鉆孔、打磨、取芯等多種功能。
圖5 UDTs概念演示樣機及工程樣機[32]Fig.5 Concept demonstrator and engineering model UDTs[32]
1.6 中國有關科研機構
國內關于超聲波鉆探器的研究主要集中在高等院校,以沖擊式和回轉沖擊式的鉆探器研究為主。2008年,南京航空航天大學的郭俊杰等[33]率先開展了超聲波鉆探器的研究,基于巖石破碎機理提出了一種新型的沖擊式超聲波鉆探器。2010年,南京航空航天大學的楊康等[34]研制了適應溫度-40 ℃~80 ℃的單晶壓電陶瓷(PMNT)驅動的沖擊式超聲波鉆探器并進行了高低溫試驗。2015年,中國地質大學梁彩紅等[35]提出了采用解耦的方式將鉆探器的動力學分析簡化為集中力對連續柱激勵共振響應求解的新方法。2016年,太原理工大學的畢亞蘭等[36]借助仿真和實驗方法獲得了自由質量塊質量和活動空間對超聲波鉆探器鉆速的影響。以上機構研制的鉆探器均為沖擊式超聲波鉆探器,變幅桿與鉆桿之間忽略了恢復彈簧而采用螺紋連接,且具有相似的結構與性能特點。雖然對超聲波鉆探器在性能提升、模型改進和環境適應性方面均有涉獵,卻存在研究的延續性不足問題,分別僅提出了一代鉆探器樣機。
2012年,哈爾濱工業大學與中國空間技術研究院合作開展了基于超聲波鉆探器面向地外天體鉆探采樣的研究。針對超聲波鉆探器的作動方式優化和鉆進速度提升做了大量工作。2017年,全齊全等[37-38]提出了兩種由單壓電陶瓷疊堆兩端的縱振能量分別驅動鉆具做沖擊運動與回轉運動的超聲波鉆探器(Rotary-percussive ultrasonic drills, RPUD),如圖6所示。鉆壓力5 N、功耗100 W的RPUD,在75 MPa的砂巖上實現了40 mm/min的鉆進速度,是目前為止所有相關科研機構中鉆速最快的超聲波鉆探器。超聲波鉆探器的研究雖然在國內已經興起多年,但是還沒有得到更廣泛的研究與應用,實驗研究也處在模擬空間驗證階段,且提升鉆速和探究空間適應性仍然是未來需要深入研究的方向。
圖6 哈爾濱工業大學研制的回轉沖擊式超聲波鉆探器[37-38]Fig.6 Rotary-percussive ultrasonic drills proposed by HIT[37-38]
2 超聲波鉆探器的振動特性研究
結合有限元仿真和數值方法能夠定量分析超聲波鉆探器的振動特征,評估壓電換能器在不同應用環境中的設計性能,優化應力波在鉆具組件間的傳遞效率。該仿真方法有助于描述和分析自由質量塊碰撞過程中出現的非線性現象,探索鉆桿碎巖的超聲波/聲波作用機理,實現對壓電換能器和鉆具組件的參數優選。
2.1 壓電換能器模型的研究
壓電換能器是超聲波鉆探器的動力來源,由夾心式壓電振子和變幅桿組成,在一階縱振模態的超聲頻激勵下,形成駐波共振并在變幅桿前端端面處達到振幅最大。根據壓電換能器的仿真結果表明,在夾心式壓電振子確定的情況下,變幅桿對換能器的振動特性具有重要的影響:變幅桿的結構設計與材料性能影響著換能器的諧振頻率、應變增幅以及驅動形式。文獻[39]發現增加變幅桿前端直徑可以實現在不降低有效相互作用質量的情況下增加換能器的振幅,基于此提出了狗骨型變幅桿。文獻[40]研究了模態退化型變幅桿,改變了壓電換能器純沖擊的驅動形式,實現了超聲波鉆探器的縱扭復合運動。同時,傳統的變幅桿仍具有不可克服的缺點,比如在某些應用中希望降低諧振頻率就需要增加變幅桿的長度至米數級,過長的變幅桿在應用中并不切合實際,并且由于變幅桿直徑比的要求,勢必導致變幅桿加工過程中的原材料和時間上的浪費。為了克服傳統變幅桿的缺點,文獻[41]提出了折疊、平面折疊和翻轉構型的三種新型變幅桿。通過比較三種新型變幅桿發現翻轉型變幅桿綜合性能較好,在保持換能器性能的同時縮短了傳統變幅桿的長度。
對壓電換能器仿真模型的研究結果表明,基于一維壓電材料波動方程演化的梅森等效電路模型可以簡化波動方程的計算過程,有利于求解尺寸規則換能器的振動響應和確定設計參數。文獻[14]通過對比梅森等效電路模型和ANSYS軟件求解的換能器響應,優化了梅森等效電路模型。文獻[42]為消除梅森模型中變壓器頂端與聲學傳輸線節點之間的電路元件提出了KLM模型,進一步簡化了梅森等效電路模型。基于有限單元法和經典等效電路推導的FEM等效電路模型[43]是將有限元方程轉換為模態方程后對模態方程進行等效變換建立的,考慮了驅動電源與換能器的相互作用,可以方便求解尺寸不規則的換能器在無負載和有負載情況下的位移、振速、阻抗以及功率。有限單元法對壓電材料建模所需的機電耦合單元通過ANSYS軟件可以方便獲得。ANSYS軟件對等效電路模型起到補充作用,可以體現換能器更多的工程設計細節,在確定節面、參數調整、確定全頻響應和獲得應力分布方面具有突出的優點。文獻[43]將壓電換能器模型進一步簡化為由質量-彈簧-阻尼系統表示的集中質量模型,細化了變幅桿前端與負載作用的有效質量范圍。文獻[44]基于力-電-聲類比方法,建立了模態退化型壓電換能器的聲阻抗網絡模型,可以對換能器聲阻抗和頻率對應關系進行研究。總體來說,壓電換能器模型的研究已經相對成熟,在構型優化和模型細化方面已經具備了系統的研究方法。
圖7 FEM等效電路模型[43]Fig.7 FEM-equivalent circuit model[43]
2.2 超聲波鉆探器集成模型的研究
超聲波鉆探器的集成模型是耦合壓電換能器模型對鉆具組件和被鉆介質之間相互作用的動力學建模。考慮直驅式和沖擊式超聲波鉆探器的結構不同,將集成模型的建立分為兩類進行研究。由于回轉沖擊式超聲波鉆探器是由直驅式和沖擊式超聲波鉆探器發展而來,其集成模型的建立依據回轉驅動形式不同分別對應于直驅式和沖擊式的超聲波鉆探器。直驅式超聲波鉆探器的鉆桿是壓電換能器波長的一部分,鉆桿傳遞給被鉆介質的振動頻率與壓電換能器的驅動頻率相同,因此直驅式超聲波鉆探器的集成模型可以參考壓電換能器模型的建立方法。
在沖擊式超聲波鉆探器中引入的自由質量塊導致鉆探器的集成模型增加了兩個相互作用的接觸面:變幅桿與自由質量塊的相互作用、自由質量塊與鉆桿的相互作用,使得集成模型建立變得復雜[45]。一般需要分別建立各部件的相互作用模型,然后將各部分模型進行耦合。Bar-Cohen等[46]結合動量守恒和能量守恒提出了簡單碰撞模型,驗證了自由質量塊與換能器碰撞運動的簡單作用機理。Bao等[47]考慮了換能器碰撞運動的有效質量,利用有限單元法獲得了自由質量塊與換能器碰撞的準確接觸時間,并采用集中質量法簡化了有限元模型。Li等[48]提出了鉆探器整體的質量-彈簧-阻尼動力學模型,相比文獻[49],在二自由度的壓電換能器模型中增加了驅動電源參數,同時將Kelvin-voigt模型用于鉆桿與被鉆介質相互作用的仿真。文獻[50]提出一種考慮鉆桿振動影響時自由質量塊對鉆桿的縱向沖擊力的分析方法。文獻[51]利用ANSYS軟件建立了鉆桿與被鉆介質的相互作用模型,對比了實心鉆桿與空心鉆桿在被鉆介質上的應力分布。綜上分析,超聲波鉆探器集成模型的研究還大多集中于鉆探器本身,而關于鉆探器與被鉆介質相互作用的研究較少。針對鉆桿的不同運動形式,詳細研究與被鉆介質之間的作用機理并考慮空間環境因素對反饋鉆探器設計和探明超聲作用的碎巖和取芯機理具有重大意義。
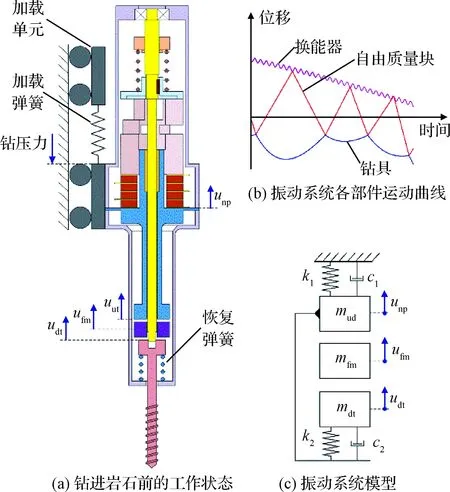
圖8 鉆進巖石前的RPUD振動模型[45]Fig.8 RPUD vibration model before rockdrilling[45]
3 超聲波鉆探器的控制及驅動電源研究
目前驅動電源研究以鉆探器自身的諧振控制為主,同時考慮了鉆探環境因素的變化。自身諧振控制主要是通過自動頻率追蹤系統與恒振幅系統或恒功率系統結合的控制方法實現[52]。JPL開發了一種能夠安裝在Auto-Gopher-Ⅱ內部并能使用總線驅動電壓且適應溫度在100 ℃左右的驅動電源[53],具有應對環境溫度、壓力和機械邊界條件變化引起的鉆探器諧振頻率變化的能力。該驅動電源通過實時監測鉆探器的功率進行頻率調整,利用霍爾電流傳感器測量換能器的電流作為控制換能器振幅的參數,采用低側電流感知電阻器測量換能器傳遞到鉆桿和巖石的真實功率。文獻[16]還提出一種高壓線路快速可復位熔斷器的電路設計方案以防止驅動電源故障對主系統高電壓的影響。格拉斯哥大學采用P100控制單元控制驅動電源的輸出電壓和輸出電流同相,從而使鉆探器恒振幅穩定工作。在驅動程序的負反饋設計中,討論了三種反饋參數對控制精度的影響:基于換能器前端振幅的機械反饋、基于壓電陶瓷電流的電流反饋和基于換能器電流與功耗的功率反饋。俄羅斯比斯克超聲技術中心采用自動頻率追蹤技術將驅動電源輸出功率與環境變化建立自適應的對應關系,研制了一種隨鉆探器鉆進深度增加和鉆進介質機械參數改變自動調整輸出功率以維持鉆進速率的驅動電源。哈爾濱工業大學針對壓電換能器與超聲波鉆探器驅動特性的差異性,提出采用D類放大器設計驅動電路并將最大電流法、自動追頻技術和恒振幅控制方法結合,設計了適用于沖擊式超聲波鉆探器的驅動電源[54]。恒振幅控制由降壓式變換電路(Buck電路)控制輸出電流的恒定實現。
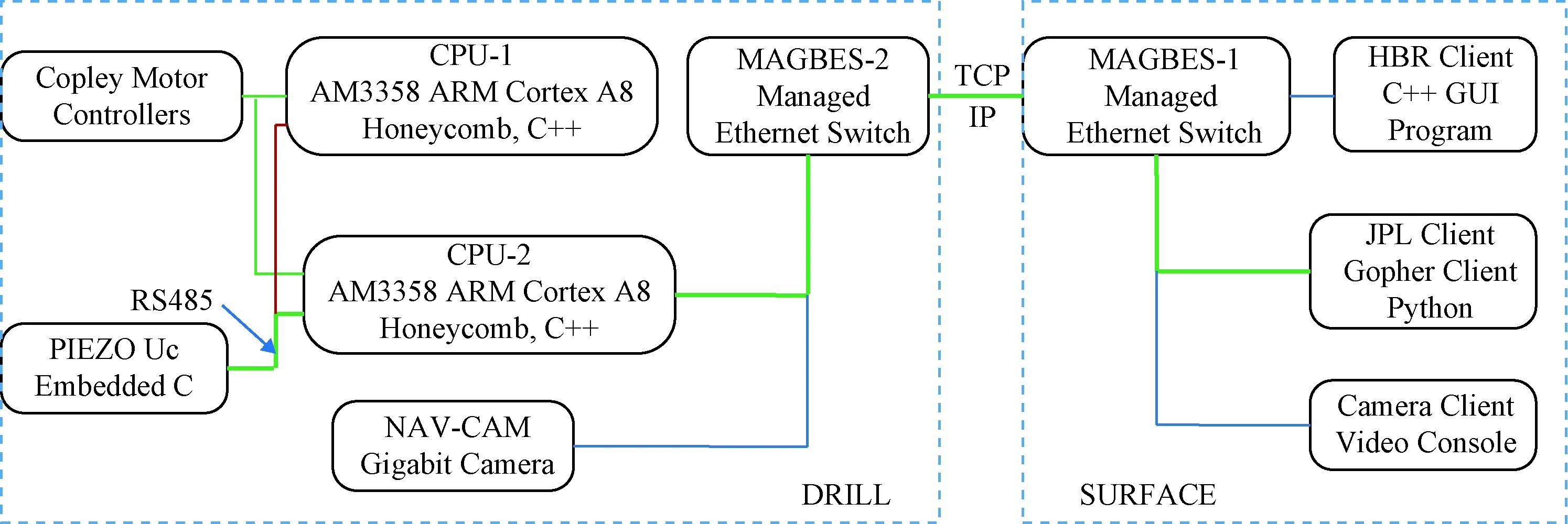
圖9 JPL研制的驅動電源控制策略[53]Fig.9 Drive power control strategy developed by JPL[53]
此外值得注意的是,由于自由質量塊的存在和鉆進介質的改變使鉆探器在鉆進過程中的幅頻特性呈現不穩定和多值對應關系,控制換能器工作的自動頻率追蹤技術不完全適用于高品質因數的諧振系統,而鉆探器的幅相特性在鉆進過程中表現穩定且不受負載的干擾,因此英國Magna Parva公司舍棄了自動頻率追蹤技術,只考慮保證驅動電源的輸出電壓和輸出電流同相的方式使鉆探器工作在諧振狀態。所研制的驅動電源采用了符合空間標準的電子元器件,并將元器件的總數量簡化到72個。結合上述分析,未來在研制針對空間一般性場合的超聲波鉆探器驅動電源時,除了鉆探器自身諧振控制以外,基于未知鉆進對象在線辨識的全流程閉環控制算法以實現鉆進參數自主調整方面仍需重點關注。鉆進對象在線辨識的全流程閉環控制是實現超聲波鉆探器利用自身聲吶優勢實現智能鉆探的前提。
4 超聲波鉆探器地外天體應用的探索研究
由于太陽系星體環境的多樣化,不同星體的采樣任務將對超聲波鉆探器提出不同的設計指標,要求鉆探器在適應不同星體環境的同時獲得理想的科學樣品。USDC是超聲波鉆探器系列樣機的設計原型,其具備較完善的理論模型與結構設計方法支持不同應用樣機的設計開發。基于USDC的通用功能,學者們探索了多種結構與功能的超聲波鉆探器系列樣機以適應不同環境下的采樣探測任務,包括可以完成鉆孔、取芯、錨固、打磨的超聲波裝置和輔助選點探測與原位分析的智能型超聲波鉆探器。
4.1 鉆進取樣
基于USDC開發的新型超聲波裝置保持了低鉆壓力、低功耗、碎巖速度快與耐溫范圍寬的優點,在適應星體地形、深度鉆取和次表層取芯方面具有突出優勢。
進行星體表面采樣工作之前,首先清除巖石表面的風化層并暴露出巖石的原始表面,可以幫助探測器獲得更加有效的科學信息。Bar-Cohen等[55]開發了一種由翻轉型換能器和齒形打磨頭組合而成的超聲波打磨裝置(Ultrasonic rock abrasion tool,URAT),利用超聲波工作機理實現了模擬巖石風化層的快速去除。有科學家提出,探測星球上峽谷的側壁可能會獲得新的巖石礦物信息或天體生物學信息[56]。為了實現探測器在峽谷的側壁等一些苛刻環境下行走和保持固定,Badescu等[57]提出了超聲波錨固裝置(STAR-USDC)。錨固裝置由四個超聲波鉆分別搭載在探測器的四足末端組成。錨固所用的超聲波鉆利用雙自由質量塊結構可以實現鉆體的自動回收并避免卡鉆。火星、月球和木衛二等天體的未來探測任務提出獲取地表深層樣品的要求,以更好的研究地外天體的地質物理性質和生物學信息。對星體內部存在的冰層,Bar-Cohen等[15]提出Ultrasonic/Sonic Gopher裝置,該裝置采用循環取芯的方式,鉆頭內部空間決定了每段冰芯的長度。同時低導熱性鉆頭和空載循環驅動兩種方式避免了鉆頭發熱融化冰層導致的卡鉆問題。試驗在-60 ℃模擬環境中進行,鉆取深度達到1.76 m。為了提高鉆進深度與鉆進效率,研制了Auto-Gopher系列的鉆探器。室外測試實現了在石灰巖地質中7.52 m的取芯深度[53]。此外,文獻[58]還開發了多種可更換鉆頭的超聲波鉆探器,以實現多種形狀樣芯與巖屑粉末的收集。文獻[59]研究了不同壓電材料制作的USDC采樣器對500 ℃高溫的適應性。除此,還尚無高低溫環境對超聲波鉆探器樣機性能影響的文獻研究。

圖10 Auto-Gopher-Ⅱ現場試驗[53]Fig.10 The field test of the Auto-Gopher-II[53]
4.2 智能鉆探
USDC不僅可以實現不同樣品的鉆進取芯,還可以作為傳感裝置輔助探測器選擇合適的采樣點和實現樣品的原位分析。研究者們基于USDC具有的聲吶功能提出了智能型超聲波鉆探器的概念[7]。
鉆探器自身具有的聲源組件可以作為聲納的信息源。在鉆探器未接觸星體表面時,鉆探器可同時作為發射器和接收器產生應力波感應到星體表面,通過分析返回波數據能夠獲得星體地質分層結構、力學性質和地質洞穴存在的信息等[60]。鉆探器鉆進之前的地質信息探測可以幫助選擇更有探測價值的樣品區域、節約探測器的能源。當鉆探器接觸星體表面時,鉆桿沖擊被鉆對象使鉆探器的阻抗發生變化[61]。通過檢測鉆探器的諧振頻率與阻抗值變化可以獲得介質的剛度等力學信息。將探測的信息與實驗測得的波速、頻譜和阻抗數據對應起來構建數據庫,可為后期研究星體樣品識別的魯棒控制算法提供基礎。
根據USDC的縱振模態特征,可以在鉆頭處安裝傳感器實現在鉆進取芯過程中對樣品的原位分析。原位分析通過對樣品的實時檢測可以避免樣品采集后在保存過程導致的交叉污染造成科學信息不準確。可以選擇的傳感器有:熱電偶、RF接收器、渦流裝置、聲學傳感器、介電特性傳感器,以及一些光纖傳感裝置。Blake等[62]對USDC鉆取樣品的成分保持性進行了研究。經過Horiba CAPA-500粒度分析儀和CheMin XRD/XRF光譜儀分析表明,USDC鉆進過程產生的粉末的粒度和相位譜組成與在實驗室使用研磨機制備的粉末粒度和相位譜組成相同,這支持了USDC對樣品原位分析的可能性。
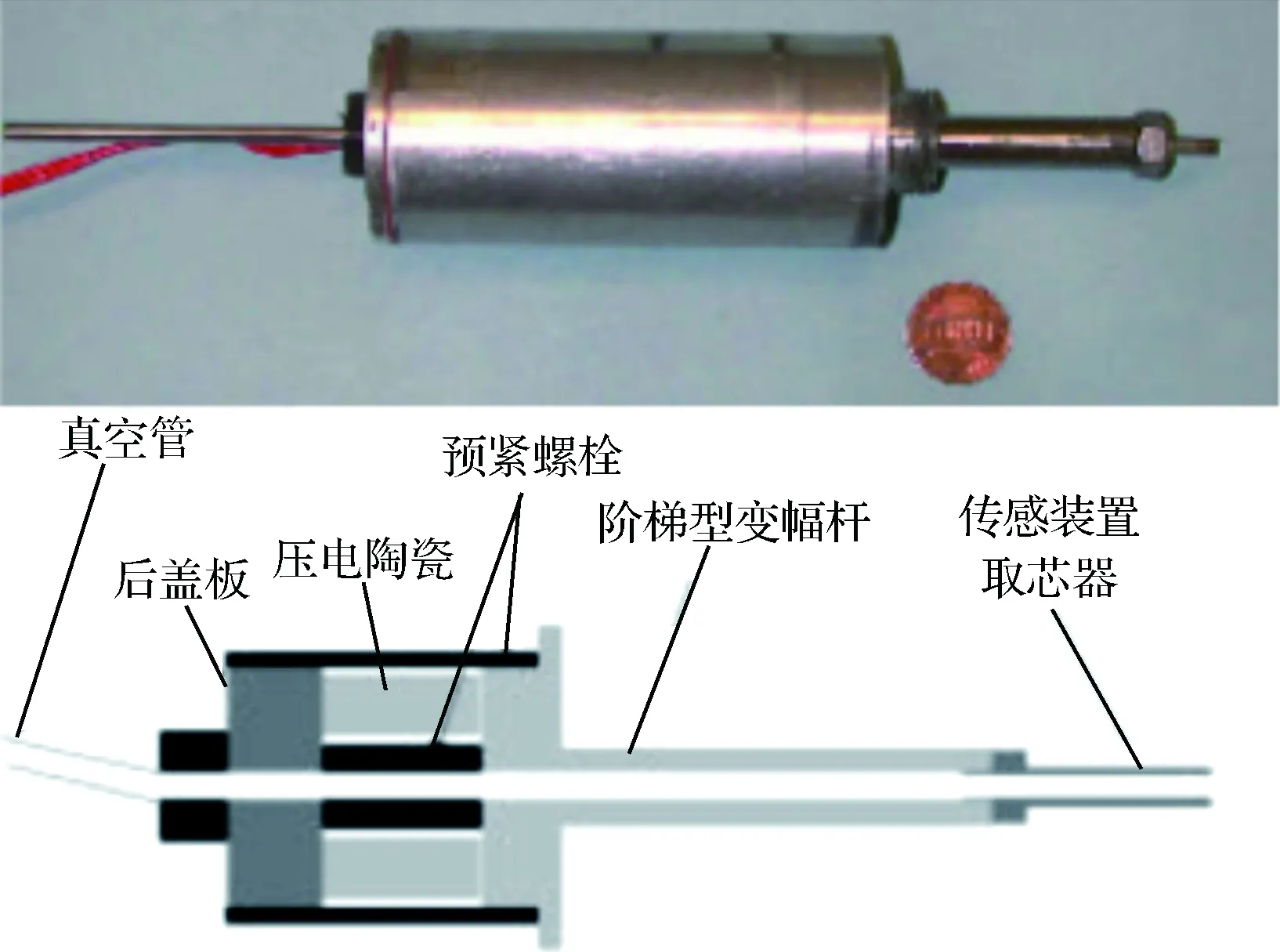
圖11 開發的智能型USDC[7]Fig.11 Developed smart USDC[7]
5 結論與展望
對比分析國內外各科研機構研制的超聲波鉆探器可知,針對不同類型的超聲波鉆探器,在理論分析、樣機研制和實驗研究方面均積累了一定的基礎,尤其以回轉沖擊式超聲波鉆探器為主是未來深空探測任務中優勢突出、可工程實現的鉆探平臺之一。針對超聲波鉆探器的研究與應用,提出如下建議:
其次,可以舉一些優秀的“阿姨”的例子,展示給她們看,這個職業可以到達的高度和狀態,為阿姨樹立學習的榜樣。可以將國內外家政服務人員的學習和教育經歷展示給阿姨看,英國、菲律賓等家政培訓課程和學員學習情況,都可介紹給阿姨看,目的是希望阿姨認識到,這個工作不像她們想象的那樣簡單,有很多方面可以做得更好,但必須經過艱苦的學習和自我改變。
1)依據不同星體的探測任務選擇超聲波鉆探器。由于深空作業環境的限制,選擇鉆進效率優于直驅式類型的沖擊式和回轉沖擊式超聲波鉆探器具有較高的實用價值。針對樣品取芯和快速鉆進等對鉆進速率要求較高的任務,選擇回轉沖擊式超聲波鉆探器,回轉運動在促進排屑和提高鉆進速率方面優勢明顯;針對風化層清除、無損探測和樣品原位分析等對鉆進速率要求不高的任務,選擇沖擊式超聲波鉆探器可以簡化鉆探平臺的結構。
2)研究回轉沖擊式超聲波鉆探器的結構設計。目前,回轉沖擊式超聲波鉆探器的回轉運動大多是由電磁電機激勵產生,這增加了鉆探器的質量和結構復雜程度。為了進一步集成回轉沖擊式超聲波鉆探器,應著重研究由壓電換能器同時驅動鉆桿做沖擊運動和回轉運動,并探明壓電換能器構型參數對縱扭轉換比的影響規律和能量傳遞特性。
3)研究超聲波鉆探器回轉沖擊作用下的碎巖機理。回轉運動的引入使鉆桿對巖石單純的縱向沖擊運動變為回轉-沖擊復合運動,導致鉆桿在巖石鉆進過程中的接觸狀態與邊界條件復雜化。闡明超聲波鉆探器回轉沖擊作用下的碎巖機理,并同時獲得覆蓋地面巖石所有可鉆性等級的樣本,以構建鉆進規程專家庫都是在未來鉆探應用中亟需解決的問題。
4)構建鉆探器的空間環境自適應控制方法。超聲波鉆探器對空間環境的適應性規律還不清晰,除真空、高低溫外,還需考慮強酸、宇宙輻照等因素的影響。重點研究空間環境因素與鉆探器相耦合的集成模型,同時結合基于支持向量機建立真空高低溫環境下巖石的可鉆性辨識模型,形成能夠主動適應環境的閉環控制算法,將為進一步的超聲波鉆探器空間應用奠定基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19