機器人在軌構建空間桁架結構的裝配序列規劃方法
2021-05-24 07:31:44羅建軍王嘉文王明明
宇航學報 2021年4期
羅建軍,王嘉文,王明明,劉 聰
(1. 西北工業大學深圳研究院,深圳 518057;2. 西北工業大學航天學院航天飛行動力學技術重點實驗室,西安 710072)
0 引 言
隨著航天技術的進步與應用需求的拓展,代表國家科技實力的空間站、空間反射鏡、通信天線、太陽能電站、地外基地等空間大型平臺和基礎設施的建設需求日益迫切。空間在軌服務可以拓展人類的太空活動,幫助人類進行更廣泛、更深入、更創新的空間探索活動[1]。而一些體積或質量較大的空間設施無法通過運載火箭一次部署完成,需多次發射在空間中進行組裝構建。空間在軌裝配是指在太空中,將不同的部件連接起來,構建成為一個由結構、子系統或子系統的單元體等組成的空間設施。在軌裝配擴大了我們設計任務的空間,增加了人類太空活動的多樣性[2-3]。空間在軌裝配技術未來的發展方向是空間自主裝配,而智能裝配序列規劃是實現裝配智能化、自主化、自動化的關鍵問題。智能裝配序列規劃的意義在于檢測出可行的裝配序列,在考慮各種裝配過程約束的情況下,尋找最優的裝配序列。根據裝配序列,對裝配過程的各個方面進行更優的設計和安排。另外,合理的裝配順序有利于提高裝配效率,降低裝配成本。裝配序列的自動生成和優化對于整個任務的進行至關重要[4]。
從20世紀70年代開始,NASA蘭利研究中心就進行了一系列的研究[5]。1980年,該中心在地面零重力模擬池中進行了手動裝配四面體的實驗[6]。1985年11月,在“亞特蘭蒂斯”號航天飛機上,兩名航天員手動裝配一個13.7 m的桁架結構,以此評價手動裝配的有效性[7]。隨著機器人技術與空間機械臂的發展,自主裝配成為空間裝配更好的解決方式,也是未來發展的趨勢[8-14]。
針對空間結構的在軌裝配序列規劃方法,目前已有一些研究工作。可以按照是否考慮機器人的運動,將裝配序列規劃分為兩類。對于不考慮機器人運動裝配的問題,通常利用圖論的方法建立可行解,采用軟計算的方法求最優序列。其中,Bonneville等[15]使用了遺傳算法進行求解。Chen等[16]對遺傳算法進行了改進,加入交叉變異操作以解決算法陷入局部最優的問題。Lazzerini等[17]使用了分段編碼的遺傳算法,提高了求解速度。Hong等[18]提出了一種具有啟發式工作規則的三階段集成方法,以幫助計劃器生成最佳和最有效的裝配序列,最后使用反向神經網絡方法進行求解。Cao等[19]研究了一種新的免疫算法在裝配序列中的應用。并將兩種人工免疫算法模型(骨髓模型與否定選擇算法)相結合,縮短了計算時間。Motavalli等[20]使用模擬退火算法給出了用于序列優化的評價函數。Wang等[21]利用離散粒子群算法對裝配序列進行求解。Bahubalendruni等[22]則考慮裝配過程中的機器人避撞與能量消耗,用粒子群算法求解最優裝配序列。曾冰等[23]提出利用螢火蟲算法進行序列規劃。Li等[24]對螢火蟲算法進行了改進,賦予螢火蟲可變視距的能力,提升了螢火蟲算法的性能。Failli和Dini[25]首先使用螞蟻系統進行序列檢測和優化,Wang等[26]提出了一種新的蟻群算法來生成和優化產品的裝配序列。郭繼峰等[27]將桁架系統進行分層規劃,并用蟻群算法求解。梁麗芬等[28]結合基于模型定義技術,采用混沌粒子群算法對裝配序列進行求解。
利用機器人進行裝配的序列規劃問題與傳統的序列規劃不同,需要考慮機器人對整個裝配過程的影響。文獻[25]考慮了機器人的可抓捕性與裝配方向,并對可裝配性進行定義,完成了考慮機器人的裝配單元裝配序列規劃。文獻[29]對多機器人裝配問題進行分析,將其轉化為約束滿足問題。通過對可行的重抓取進行假設,將約束滿足問題進行解耦,分解為獨立的小問題,使求解速度大幅度提高。文獻[25, 29]只考慮了機器人對裝配過程的影響,并沒有對各機器人的規劃與控制進行具體設計與求解,而本文具體分析了機器人的運動,并設計了關節軌跡與控制器。文獻[30]將機器人裝配序列規劃問題分為兩層,邏輯層與物理層。在邏輯層中規劃序列,并通過物理層進行檢測并反饋,對邏輯層規劃結果進行改進。引入了反饋機制,提高機器人裝配序列規劃效率,但是沒有考慮機器人在整個裝配過程中的控制問題。文獻[31]分析了利用機器人構建張拉結構的序列規劃問題,利用基于采樣的運動規劃方法。文獻[32]對機器人增材制造三維桁架的自動序列和運動規劃問題進行了研究,并提出了一個新的層級式規劃框架,以解決通常規劃時間長、配置復雜的擠出式序列和運動規劃問題。文獻[31-32]中沒有考慮機器人的裝配操作,只對機器人的末端軌跡進行了規劃。本文考慮裝配運動的特殊性,對機器人裝配動作進行了特殊設計,引入力反饋設計,增加了裝配的可靠性。文獻[33]針對裝配過程中機器人在桁架上的攀爬移動問題,對機器人的移動步態進行了分析。文獻[34]提出一種基于強化學習的自適應方式,在四旋翼無人機裝配桁架結構的背景下,求解了桁架裝配順序與無人機裝配時的路徑規劃問題。
本文針對采用機器人在軌構建空間桁架結構的裝配序列規劃問題,設計了機器人裝配系統,并圍繞此系統,提出了一種可同時求解機器人運動規劃與控制的序列規劃方法。在裝配系統設計方面,本文采用仿生設計方法,設計了具有雙末端執行器的裝配機器人;在機器人運動規劃與控制方面,本文設計了機器人的攀爬運動規劃與軌跡跟蹤控制方法以及裝配運動規劃與力控制方法;在序列規劃尋優方面,本文建立了考慮機器人運動路徑與控制能耗的評價指標,并采用離散粒子群算法對其進行求解。在仿真方面,本文構建了采用所設計機器人進行空間桁架裝配的任務場景,求解得到裝配序列與機器人運動與控制,校驗了本文方法的有效性與先進性。
區別于之前的序列規劃方法,本文的方法具有如下三方面優勢:首先,分析了機器人在裝配過程中的運動與控制方法。第二,在傳統序列規劃求解裝配單元裝配序列的基礎上,還可以得到機器人運動等信息。第三,建立了考慮機器人的運動路徑與燃料消耗的裝配序列評價函數,保證機器人運動路徑最短,能耗最低。
1 在軌裝配系統設計與建模
1.1 裝配系統設計
本文基于仿生學理念,參考蛇的構型以及猴子等攀爬類動物的動作,設計了靈活、自由的裝配機器人。該機器人具有兩個末端執行器,皆可抓持在空間桁架結構上。抓持在空間桁架結構上的末端執行器即可視為基座。在進行移動操作時,可通過改變機器人構型,同時兩個末端執行器輪流抓持空間桁架結構,完成機器人在空間桁架結構上的移動。在進行裝配操作時,可使機器人一端抓持住空間桁架結構充當基座,另一端完成裝配操作。
裝配機器人可根據任務要求設置自由度,一般采用六自由度或以上(見圖1),以增加機器人的靈活性。機器人采用模塊化的設計思想,各個關節由彼此獨立的模塊連接而成,可以根據不同的任務需求改變機器人的自由度以及構型配置,也可以通過改變執行器結構以完成不同的任務。
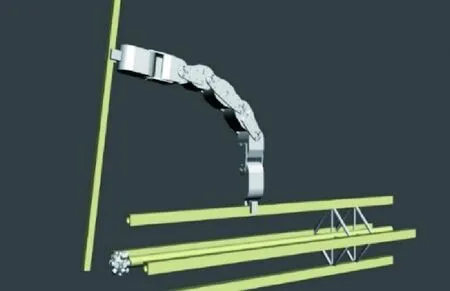
圖1 機器人裝配空間桁架結構示意圖Fig.1 Illustration of robot assembly space structure
1.2 裝配機器人建模

(1)
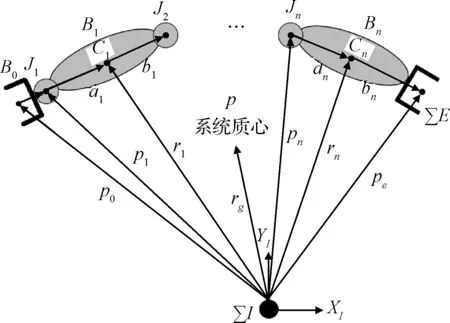
圖2 裝配機器人的一般模型Fig.2 General model of assembly robot

(2)

(3)
式中:δt為求解步長。當裝配機器人末端執行器切換充當基座時,機器人的廣義坐標與D-H參數發生變化,需要重新進行建模。為求解方便,裝配機器人一般采用對稱設計,在末端執行器切換時,只需將對稱關節角進行交換定義即可。
2 裝配機器人運動分析
本文根據控制策略的不同,將機器人運動分為巡游運動與裝配運動兩類。巡游運動完成機器人在空間桁架結構上的移動,裝配運動完成各裝配單元間的裝配。
2.1 巡游運動
由于機器人運行在空間環境,因此,設計裝配機器人的運動步態時,需確保可靠性。
當裝配機器人在同一根桿上需要向前移動時,本文設計了滑行運動步態(見圖3)。在受到干擾時,兩個末端執行器夾爪皆可迅速抓緊桿件,保證裝配機器人的安全。滑行運動步態具體運動步驟如下:
1)機器人位于初始位置,由夾爪1支撐整個機器人,夾爪2逐漸松開。
2)機器人開始收縮中間關節,使夾爪2沿著桿件滑行移動到預定位置。
3)夾爪2逐漸夾緊,夾爪1松開,完成機器人基座轉換。重復此動作完成機器人的移動。
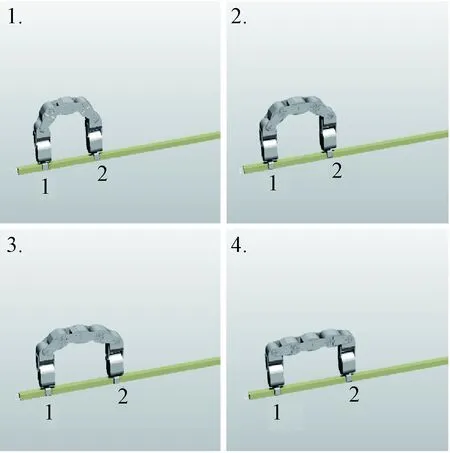
圖3 滑行運動步態Fig.3 Sliding gait
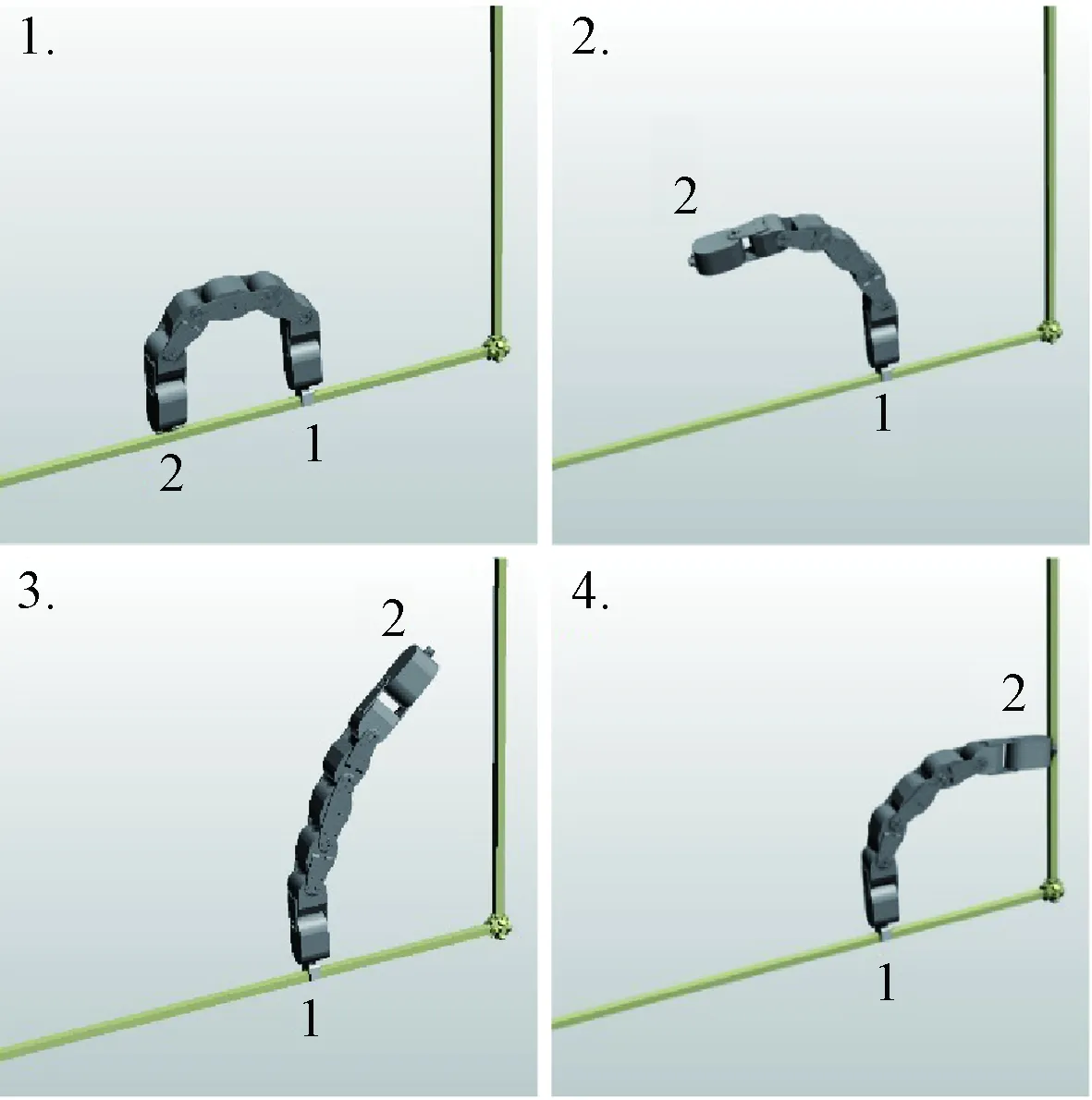
圖4 翻轉運動步態Fig.4 Turnover gait
當裝配機器人需要在兩根桿間完成跨越時,要求裝配機器人步態較大,本文在此設計了翻轉運動步態(見圖4)。翻轉運動步態具體運動步驟如下:
1)機器人位于初始位置,由夾爪1支撐整個機器人,夾爪2逐漸松開。
2)機器人中間關節開始運動,夾爪2慢慢遠離桿件,使機器人完成整體翻轉。
3)夾爪2運動到預定位置,夾爪1松開,完成機器人基座轉換;重復此動作完成機器人的移動。
在設計機器人關節軌跡后,采用逆動力學控制對所設計軌跡進行跟蹤,關節控制律為:
(4)
式中:ν為輔助控制輸入。
(5)
求得誤差動力學為:
(6)
選取合適的增益矩陣KVT與KPT即可保證控制系統穩定。
2.2 裝配運動
當裝配機器人需要執行裝配操作時,首先從初始狀態運動到裝配準備狀態,隨后夾持裝配單元桿件,開始進行裝配運動(見圖5)。具體步驟如下:
1)機器人位于初始位置,由夾爪1支撐整個機器人,夾爪2逐漸松開。
2)機器人中間關節開始運動,夾爪2慢慢遠離桿件,機器人整體翻轉,直到夾爪2運動到預定位置,機器人進入裝配準備狀態。
3)夾爪2夾緊裝配單元桿件,完成裝配運動。
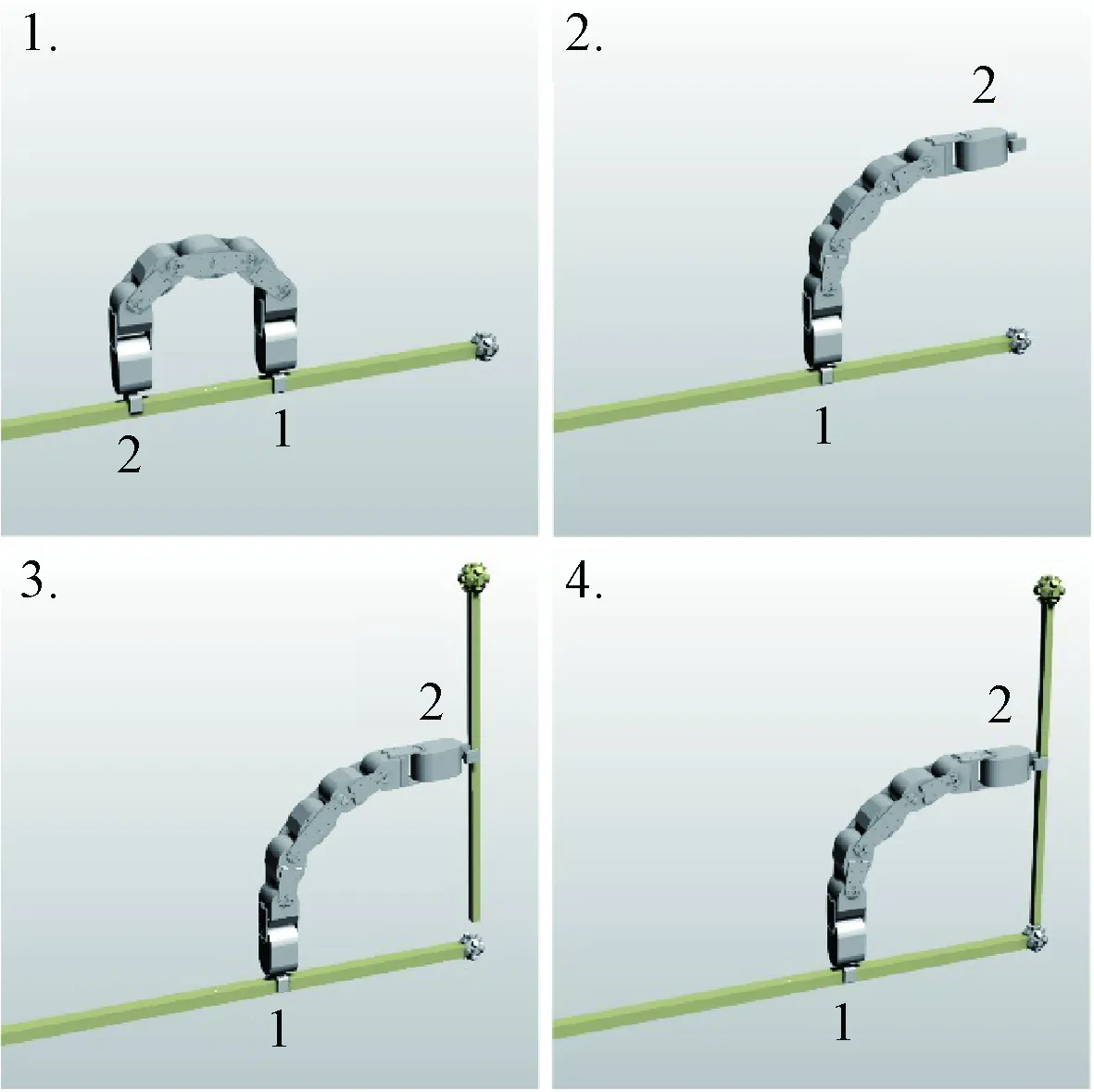
圖5 裝配機器人裝配運動示意圖Fig.5 Illustration of assembly movement of assembly robot
機器人從初始狀態運行至裝配準備狀態時,依然采用第2.1節的規劃與控制方法。在裝配開始后,首先完成機器人末端執行器z軸方向上的力控制,然后再保持接觸力,完成x-y平面上的遍歷搜索。具體流程如圖6所示。
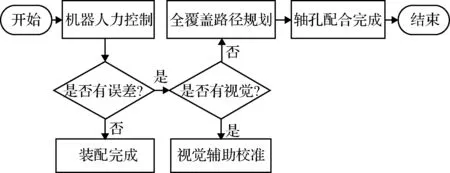
圖6 裝配運動流程圖Fig.6 Assembly motion flow chart
在建模時,本文忽略機器人的柔性,將機器人建模為剛體,將機器人接觸的環境,也就是桁架結構的桿件,建模為柔性體,其剛度用KP表示。當機器人末端與環境接觸產生微小位移δx時,所產生的彈性恢復力為:
F=-Kpδx
(7)

(8)
設計機器人在末端執行器z軸方向上的柔順控制律為:
(9)

本文力位混合控制器采用R-C控制器,R-C控制器不考慮力控制與位置控制動態耦合的影響。因此,機器人裝配過程中兩個階段的控制力為:
(10)
3 裝配序列規劃
傳統裝配序列規劃只對裝配單元進行建模,求解各裝配單元的裝配順序。而針對采用機器人進行裝配的序列規劃問題,還應考慮機器人的規劃與控制。將傳統的裝配序列規劃問題(ASP)轉變成任務與運動規劃問題(TAMP)。
3.1 裝配過程建模
與傳統的裝配序列規劃相同,首先衡量裝配單元之間的關系。根據裝配桁架結構,計算裝配關系矩陣[36]。在本文中,裝配關系矩陣包括干涉矩陣、連接矩陣和支撐矩陣三種。
除此之外,本文所規劃的裝配序列考慮了機器人對裝配的影響,其中包括裝配過程中的機器人運動路徑最短,能耗最小,因此建立機器人裝配的運動模型。本文基于圖論理論將機器人運動環境建模為無向圖,隨后采用A*算法求解裝配路徑。因此本文假設機器人消耗的能量只有關節驅動部分。根據第2節求出的機器人關節控制力矩,建立機器人絕對值形式的能量消耗評價函數:
(11)
3.2 評價函數
本文針對機器人裝配空間桁架結構的特點,采用四個評價指標:裝配可行性,裝配穩定性,裝配路徑與裝配能耗。前兩個指標描述裝配單元的裝配情況,文獻[37]已經敘述了其計算方法。后兩個指標描述裝配過程中機器人的情況,計算方法如下:
1)裝配路徑
裝配路徑表示在裝配過程中,各機器人所運動的路徑長度之和。建模為無向圖G=(V,E),并計算SR(Σ)=[SR(Σ),SR0(Σ)],nl=nl+nl0。所有裝配單元檢測完成后,輸出各機器人路徑SR(Σ)與機器人運動路徑之和nl。顯然,nl越小,機器人行駛總路徑越短,裝配越優。
2)裝配能耗
裝配能耗表示在裝配過程中,各機器人消耗能量之和,將其定義為ne。對于裝配序列{P1,P2,…,Pn},在計算完機器人路徑SR(Σ)后,根據4.4能耗計算方法,求解機器人能耗F,令ne=F,并輸出各機器人運動規劃qd與控制律τ。顯然,ne越小,機器人消耗總能量越小,對裝配有利。
將以上評價指標進行歸一處理,建立函數模型,準確評價裝配序列的優劣。對于序列{P1,P2,…,Pn},其評價函數為:
(12)
裝配評價指標中,(1)、(2)兩個指標為約束指標,不滿足該指標的裝配序列無法完成裝配。因此,滿足裝配序列可行的約束條件為:
(13)
其中,nc代表裝配穩定性,ns代表裝配支撐性,nl代表裝配路徑,ne代表裝配能耗。ω1,ω2,ω3,ω4分別代表各指標權重系數,且ω1+ω2+ω3+ω4=1。各權重系數可根據不同裝配的不同需求制定。而約束條件代表裝配序列滿足的前提條件,即在裝配每一步都需要是穩定的且每一步都有可進行裝配的方向,即與之前的裝配不發生干涉。
3.3 離散粒子群
空間桁架在軌裝配序列規劃是一個離散整數組合優化問題。在此采用離散粒子群算法求解。在裝配序列規劃中,裝配序列為待優化項。因此,用粒子i的位置表示裝配序列,粒子i的維數即為裝配單元個數。粒子i的位置表示如下:
Xi=(xi1,xi2,…,xin)
(14)
其中,xij為從1~n互斥的整數,n為粒子i的維數,即裝配單元個數。xij表示粒子i的j維分量,代表裝配序列Xi的第j個裝配單元。初始裝配序列可以隨機生成,也可以人為輔助給出。粒子的速度決定粒子位置的改變,與粒子位置維數相同。因粒子中所有元素互不相同,因此粒子速度可看成對粒子位置中元素位置的調整。粒子i的速度表示為:
在多方共贏的工學結合培養模式下,本專業教學水平全方面提升,教師專業技能得到鍛煉,近年來連續獲得省級技能競賽二等獎,行業競賽一等獎等教學成果;課程內容進一步完善,不斷產生教學改革、課程改革等項目;學生就業率與對口率逐漸提高。學院在合作過程中大量減少校外實習基地建設精力與經費,同時節約教師專業技能培訓開支。通過技術工作室外包服務孵化學生創業,產生校園創業項目,與企業合作范圍不斷擴大過程中提高學院在行業中的知名度,提高相關專業就業情況。
Vi=(vi1,vi1,…,vin)
(15)
其中,vin表示粒子i第n個裝配單元的速度,初始粒子速度隨機生成。
由于裝配序列具有的特殊性質,需要對粒子速度與位置作出約束,粒子位置中的元素應包含所有裝配單元編號且不能重復。因此對粒子與運算準則進行重新定義[38],采用下式對粒子i的速度與位置進行更新:
(16)
式中:w為參數慣性權重,其控制前一代速度Vi(t)對此時速度Vi(t+1)的影響;c1與c2為學習因子,c1控制個體歷史最優位置Pi(t)對速度Vi(t+1)的影響;c2控制全局最優位置Pg(t)對當前速度Vi(t+1)的影響。
4 仿真校驗
為了證實所提出的在軌裝配序列規劃的方法,本文以7自由度機器人裝配常用空間桁架結構為仿真場景,在第4.1節中對機器人、桁架及仿真需要的各項參數進行定義;在第4.2節中分析并驗證了裝配過程中的機器人運動以及控制器設計的有效性;在第4.3節中驗證了該桁架結構的裝配序列,并最終給出機器人在整個裝配任務中的運動規劃與控制。
4.1 仿真場景
本文以文獻[39]中所述空間桁架基礎結構為例設計仿真場景,圖7所示,該結構在空間可進行平鋪與擴展,是空間眾多設施構建的基礎結構。因單個桿件安裝復雜度較高,本文將基礎結構分解成三個四面體與六根單桿,一共九個裝配單元進行研究,以減少裝配操作,提高裝配效率與可靠性。且四面體設計為可折疊結構,采用折疊與裝配共同構建大型空間桁架的方法,綜合各方面的優點,既可減少裝配單元數量與裝配操作,也可以構建大型結構。
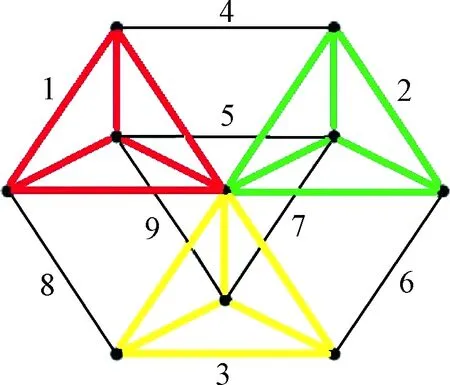
圖7 空間桁架基礎結構示意圖Fig.7 Illustration of space truss foundation structure
機器人采用7自由度,具有兩個末端執行器,機器人具體動力學參數如表1所示。
4.2 機器人運動仿真分析
機器人在整個裝配中的運動分為兩部分:同一根桿上的移動與兩根桿之間的跨越。根據第2.1節規劃的滑行運動步態,機器人規劃初始關節角q0=[0,π/3,0,π/3,0,π/3,0],切換末端執行器時規劃目標關節角為qt_s=[0,π/8,0,3π/4,0,π/8,0],本文采用三次多項式插值法規劃關節軌跡。在控制器設計中,為驗證控制器性能,給出機器人關節角初始誤差eq0=[0.02,0.1,-0.01,-0.1,0.01,-0.1,-0.02],控制律中KPT=250E,KVT=10E,E為單位矩陣。機器人完成該動作后,末端執行器切換充當基座,需要重新對關節角進行編號,此時機器人目標關節角變為初始關節角,控制機器人回到初始狀態。至此,機器人滑行運動一次步態完成。
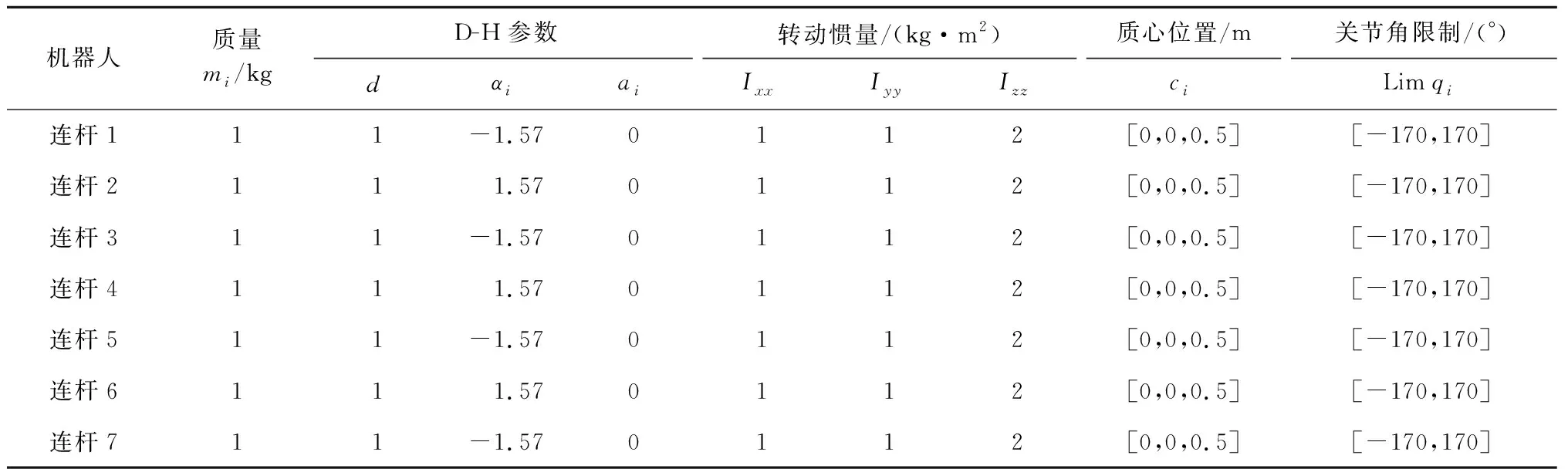
表1 裝配機器人的運動學與動力學參數Table 1 Kinematic and dynamic parameters of assembly robot
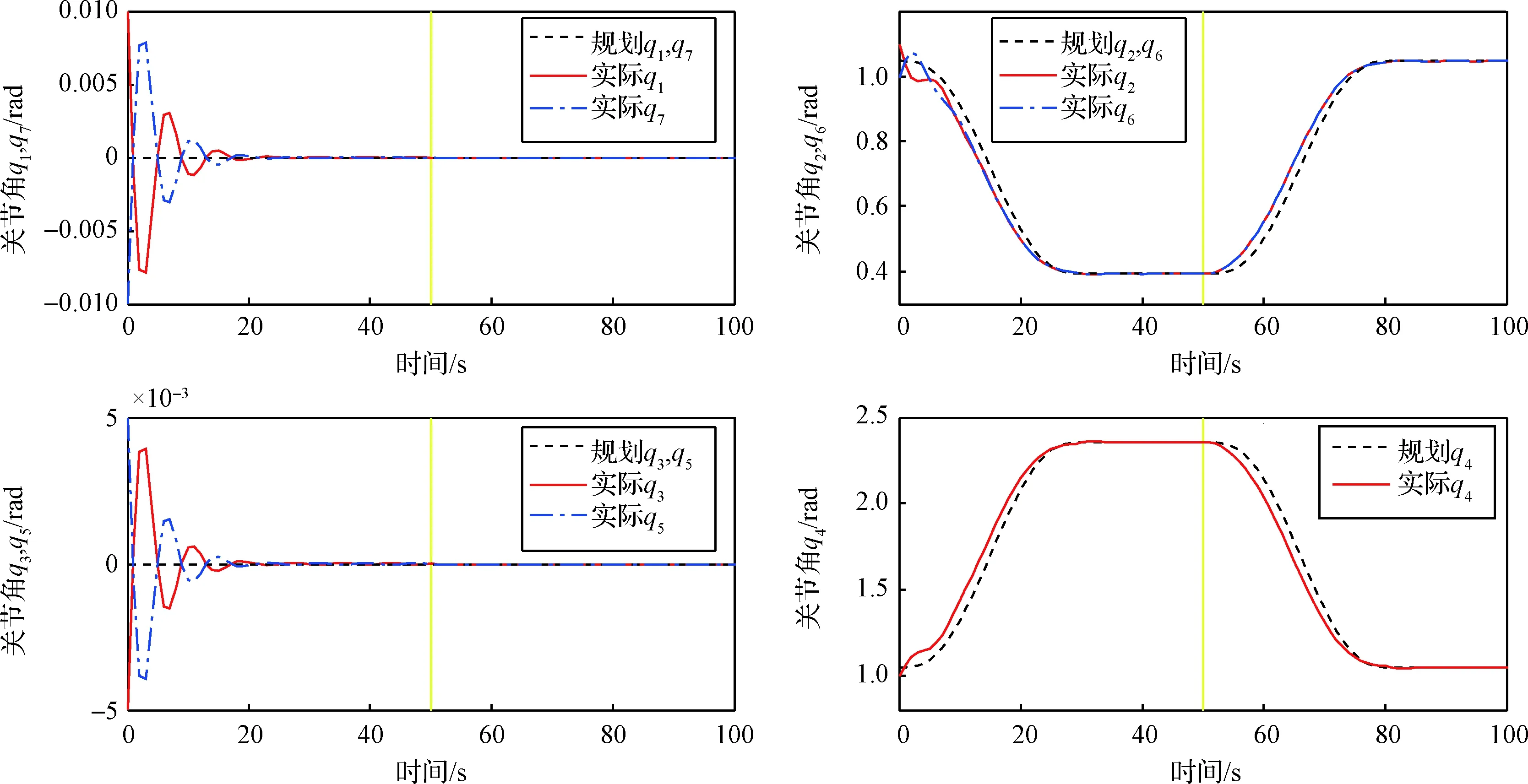
圖8 滑行運動步態機器人關節角變化Fig.8 Joint angle of robot’s sliding gait
針對本文仿真場景,可將異桿跨越運動分為60°異桿跨越運動步態與90°異桿跨越運動步態。60°跨越運動中,切換末端執行器時的目標關節角為qt_60=[0,-π/9,0,-π/9,0,-π/9,0],90°跨越運動中為qt_90=[0,-π/6,0,-π/6,0,-π/6,0]。關節角初始誤差為eq0,控制律中KPT和KVT與同桿運動相同。完成該動作后回到初始狀態,異桿跨越步態完成。
圖9展示了60°異桿跨越運動步態下的關節角變化。從圖9可以看出,規劃關節角變化平滑,控制器性能優越,跟蹤誤差較小。圖10展示了90°異桿跨越運動步態下的關節角變化,仿真結果與60°異桿跨越運動步態相近,效果良好。
第一階段仿真控制機器人末端與裝配單元期望接觸力為[0,0,-2],桁架桿件剛度為300 N/m。機器人初始末端相對基座位置為[3,1,1.6],相對基座姿態為[0,0,-π/2];實際裝配時機器人末端相對基座位置為[3,1,1],力控制律設計中KP=4E,KE=8E。圖11與圖12所示為z軸方向接觸深度與接觸力變化圖。從圖11~12可以看出,接觸深度最終穩定在0.007 mm,接觸力穩定在2 N,完成了裝配接觸力控制的目標。
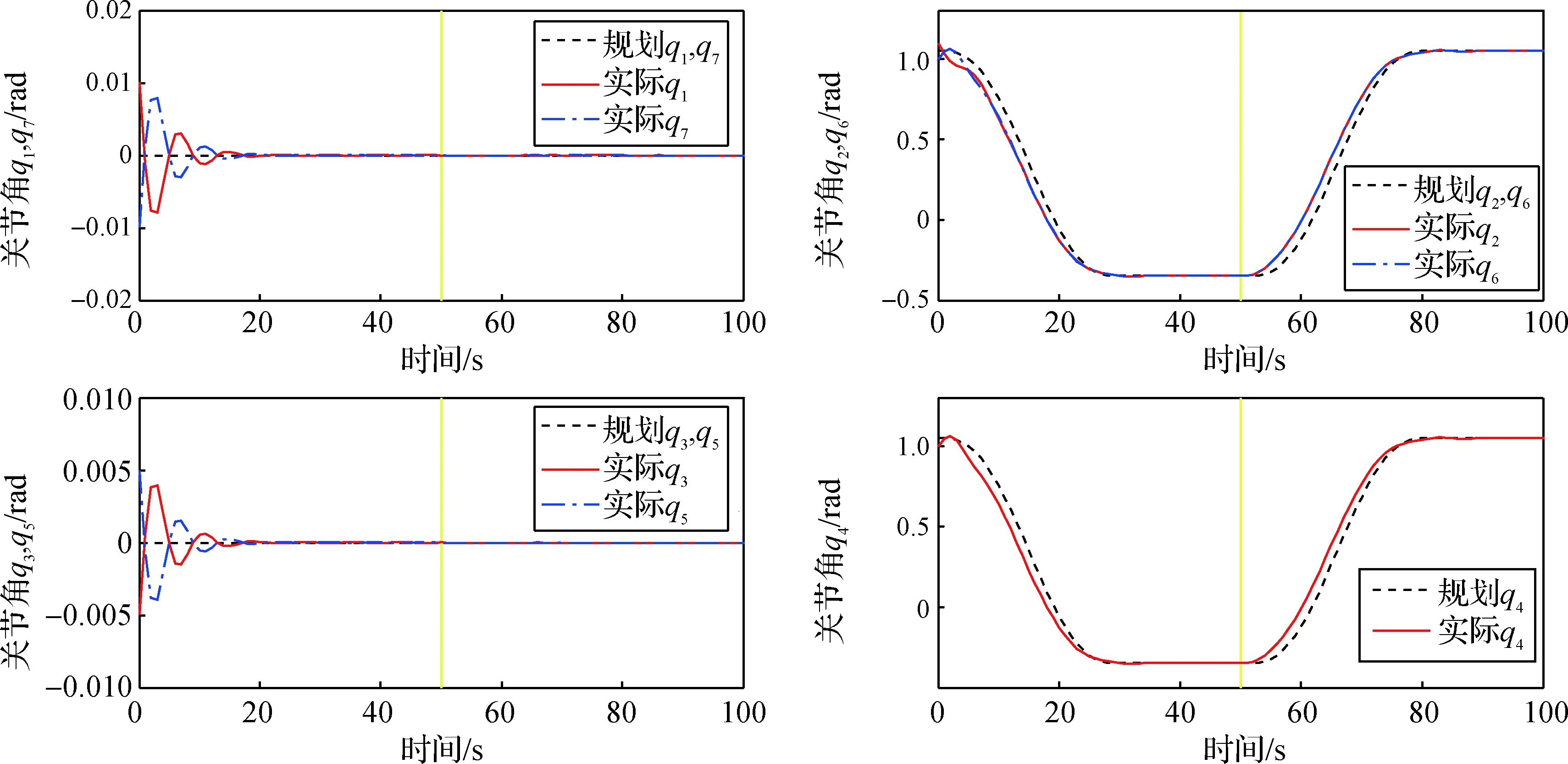
圖9 60°異桿跨越步態機器人關節角變化Fig.9 Joint angle of robot’s 60° stride over gait
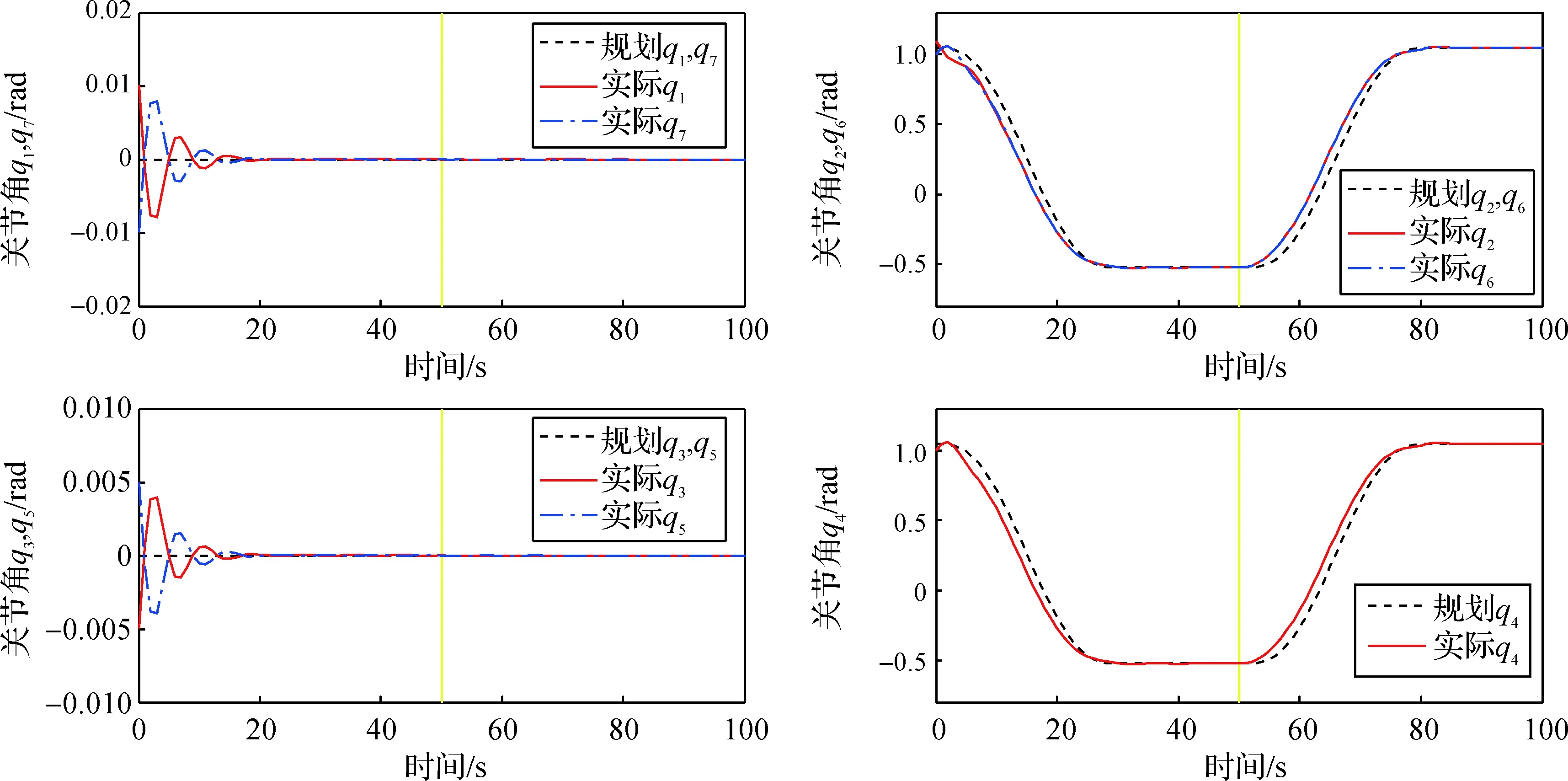
圖10 90°異桿跨越步態機器人關節角變化Fig.10 Joint angle of robot’s 90° stride over gait
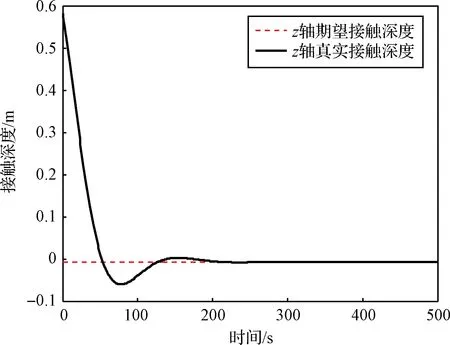
圖11 z軸接觸深度Fig.11 Contact depth of z-axis
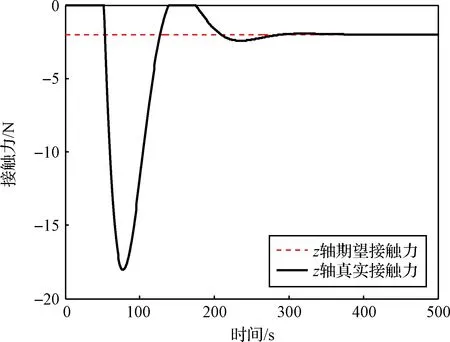
圖12 z軸接觸力Fig.12 Contact force of z-axis
圖13展示了裝配第一階段下的關節控制力矩變化。從圖13可以看出,關節控制力矩最終趨于穩定,但是不都為零,這是因為此部分關節力矩用來保持接觸力穩定。
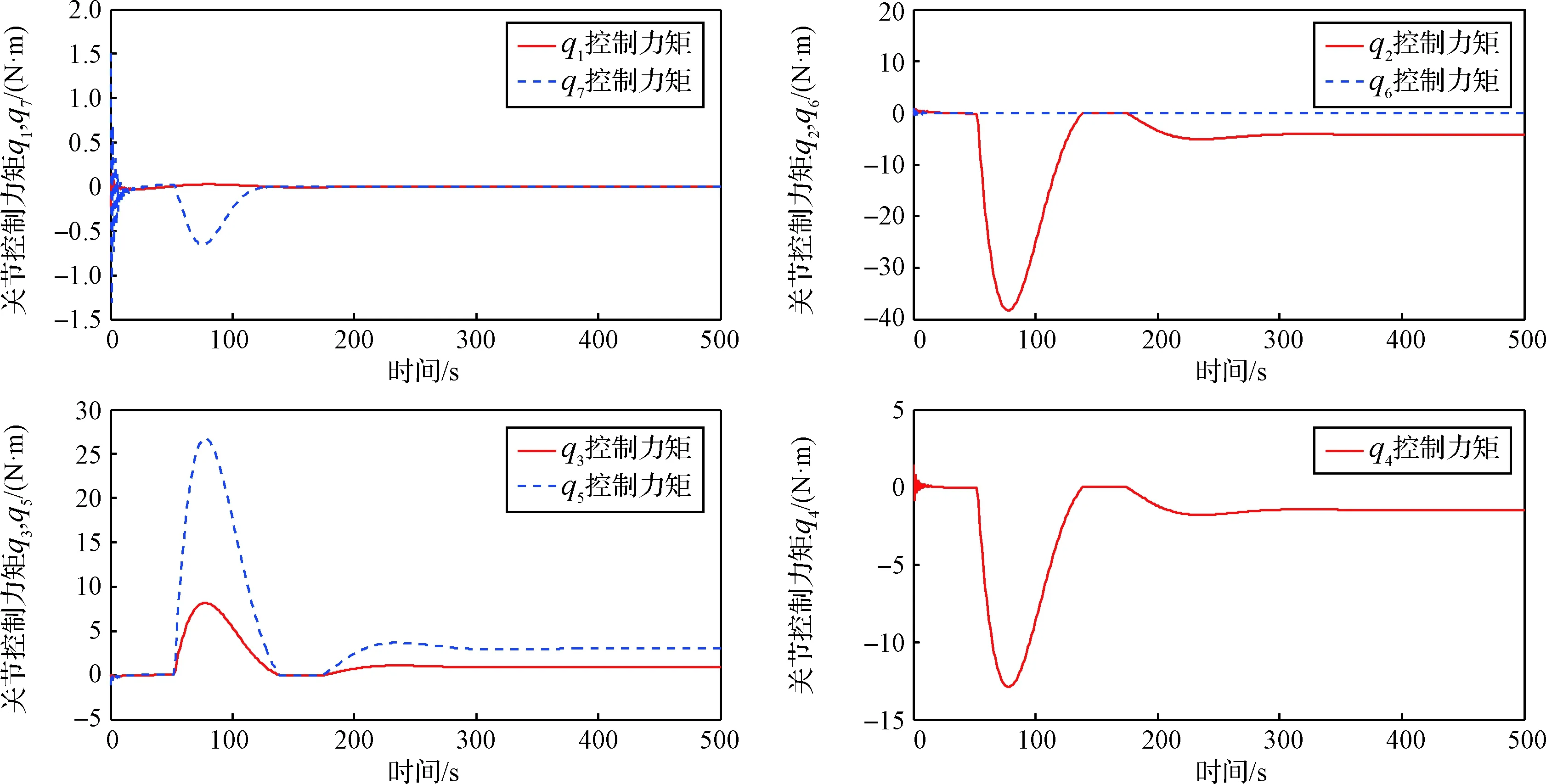
圖13 裝配第一階段機器人關節控制力矩變化Fig.13 Joint control torque of assembly first stage
第一階段仿真控制機器人在z軸保持接觸力的同時,在x-y平面進行螺旋遍歷搜索。跟蹤控制律設計中KPT=300E,KET=20E。圖14所示為機器人末端軌跡圖。從圖14可以看出,所設計控制律跟蹤效果優秀,允許裝配范圍覆蓋末端軌跡經過的所有區域,在裝配出現誤差且無視覺輔助情況下,可消除誤差,成功裝配。
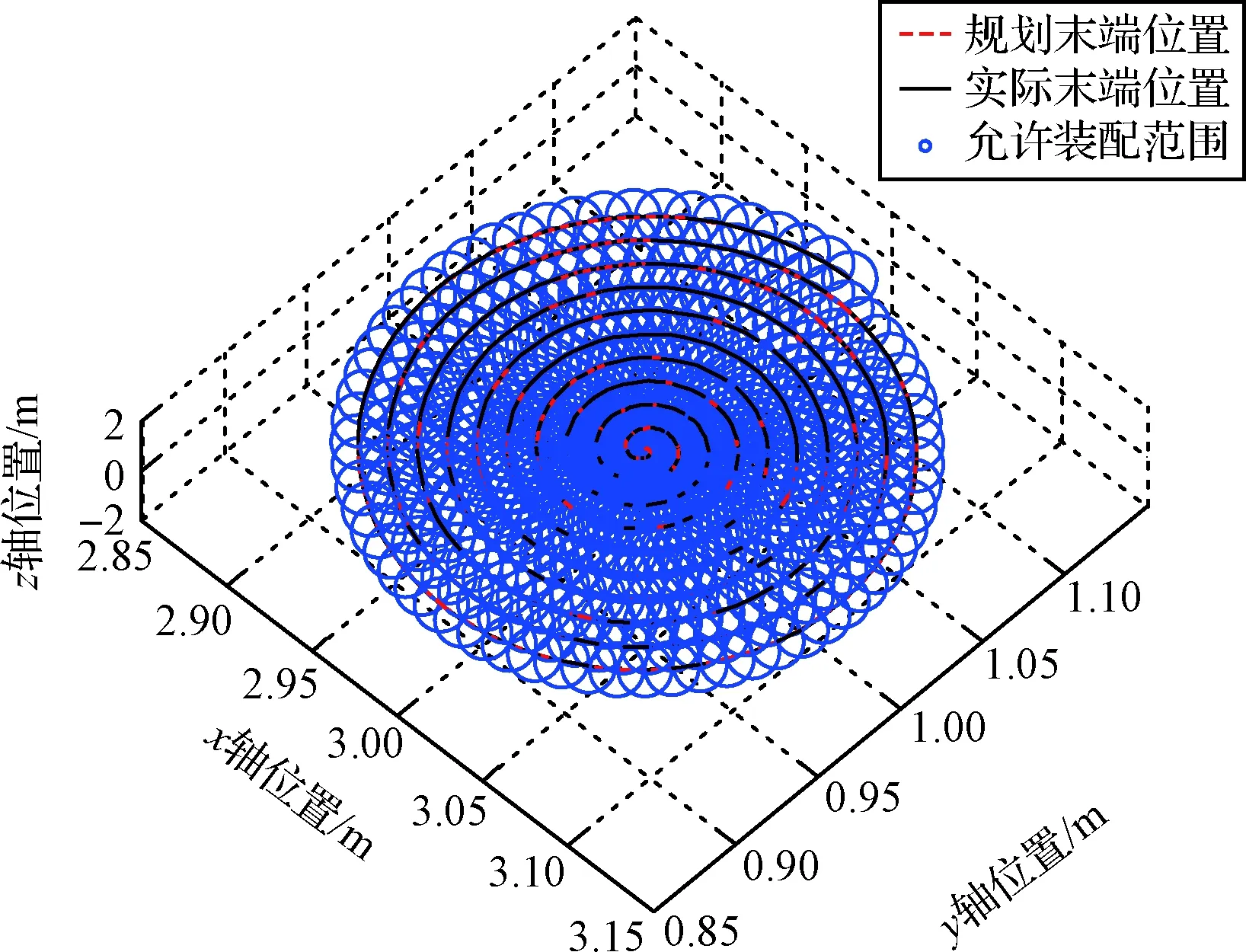
圖14 裝配第二階段機器人末端位置變化Fig.14 End-effector position of assembly second stage
4.3 裝配序列規劃
本仿真中假設裝配單元之間皆為穩定連接。在桁架標注抓取點并建立無向圖如圖15所示。
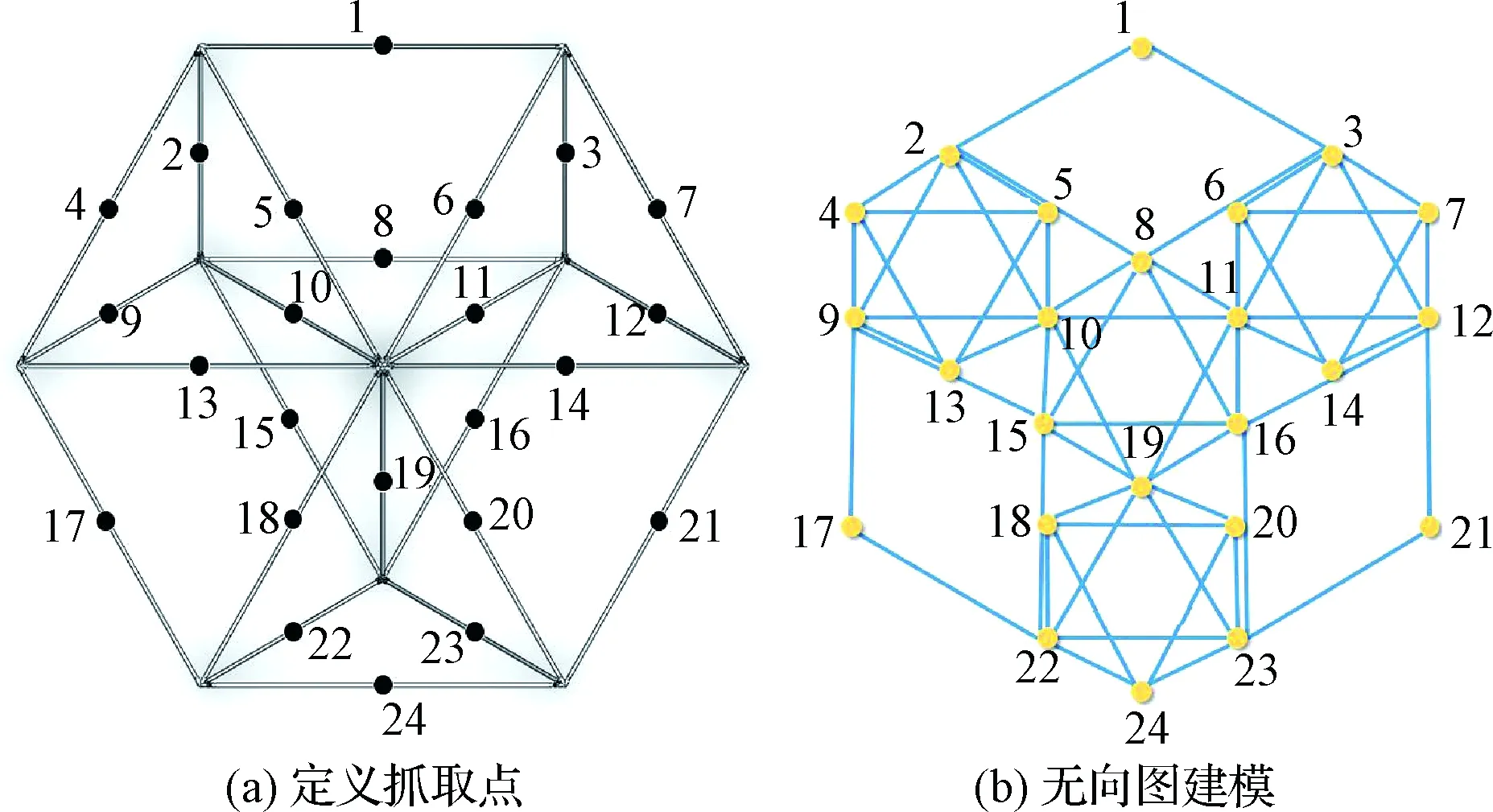
圖15 抓取點編號及無向圖建模Fig.15 Grab point number and modelling graph model
本文中裝配能耗采用絕對值形式進行計算,圖16展示了一次巡游運動與裝配運動下的機器人能耗變化圖。
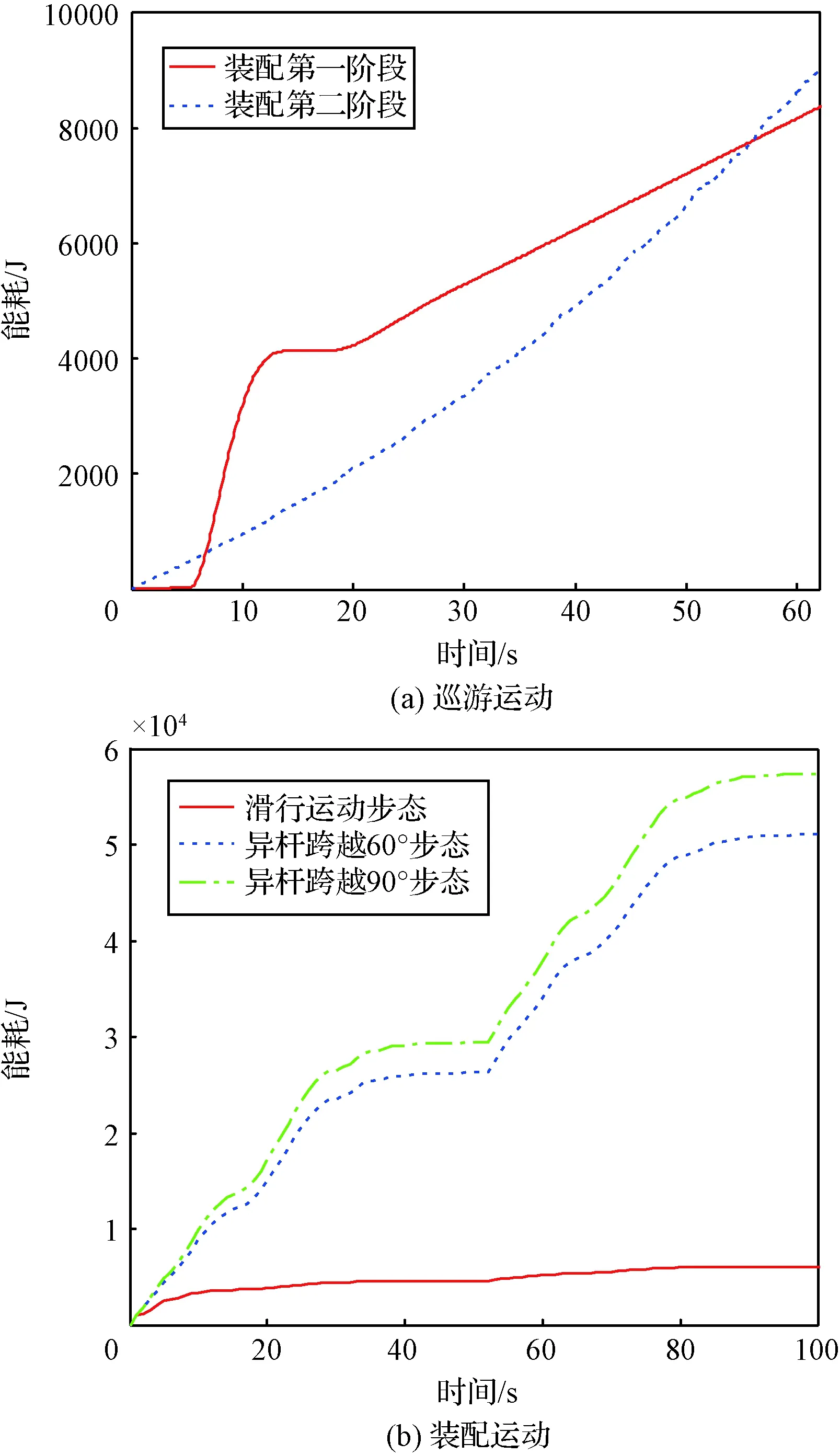
圖16 巡游運動與裝配運動能耗變化Fig.16 Energy consumption of patrol and assembly movement
本文仿真在求解時,假設:1)裝配環境不存在重力,且各裝配單元之間連接都為穩定連接;2)機器人在運動過程中無外界干擾,在裝配過程中無誤差;3)不考慮機器人運輸與拾取裝配單元的操作;4)編號為1,2,3的四面體裝配單元,在每條邊上機器人只需要一步即可跨越至相鄰桿。而編號4,5,6,7,8,9的六個單桿裝配單元,機器人需要做一步同桿移動的動作,方可跨越至相鄰桿。
基于上述假設,評價函數式(12)中ω1=ω2=0,考慮機器人路徑與能耗對裝配過程的影響,在此設置ω3=0.3,ω4=0.7。種群數量為20,進化次數為500。學習因子c1=0.2,c2=0.8。取w=0.4,0.7,0.9時,得到適應度函數變化曲線,如圖17所示。
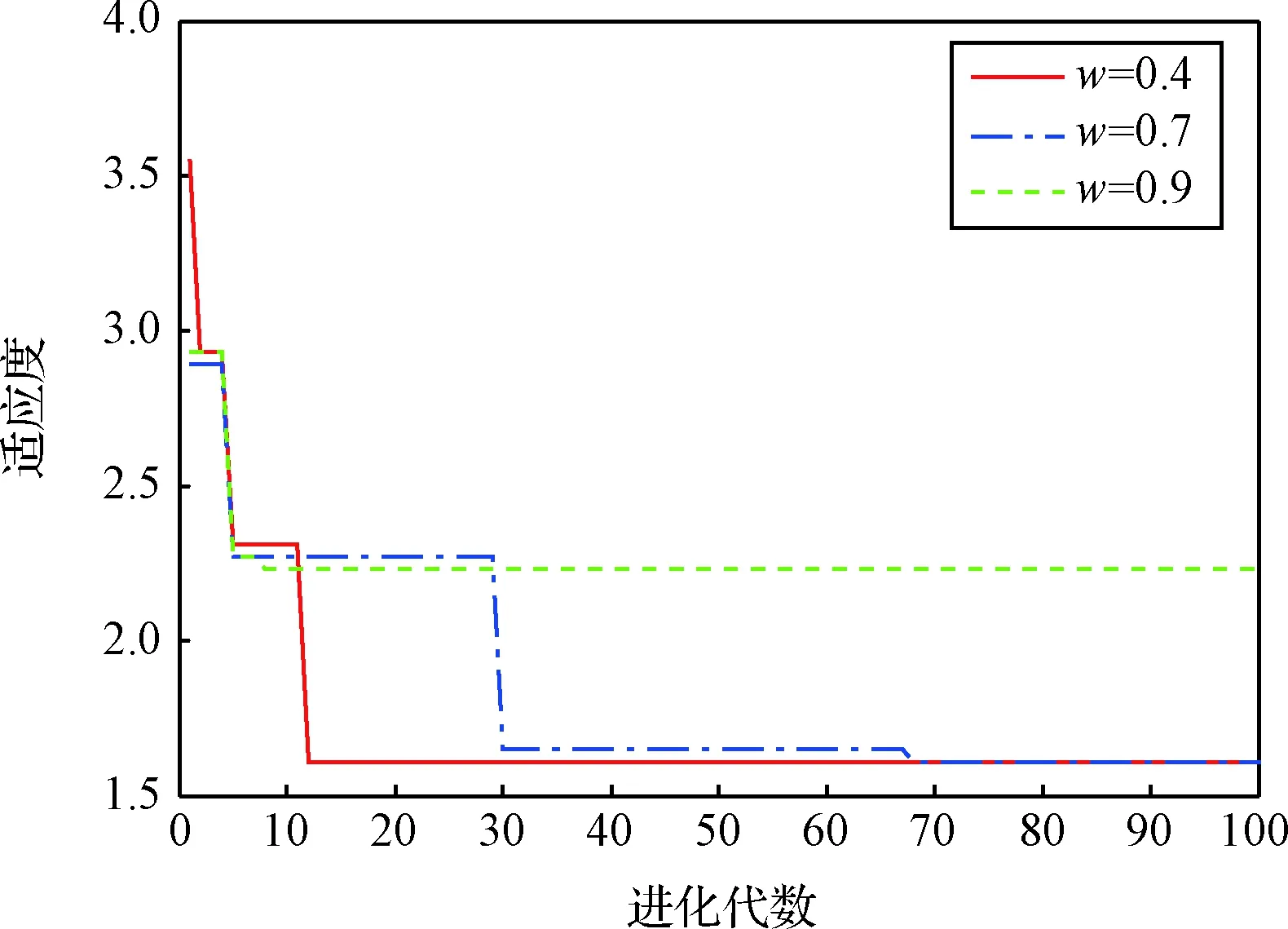
圖17 參數慣性權重w對適應度的影響Fig.17 The influence of parameter inertial weight w on fitness function
從圖17可以看出,最終適應度函數fmin=1.6111,與其對應的最優序列、機器人運動路徑、機器人動作等裝配規劃如表2所示。
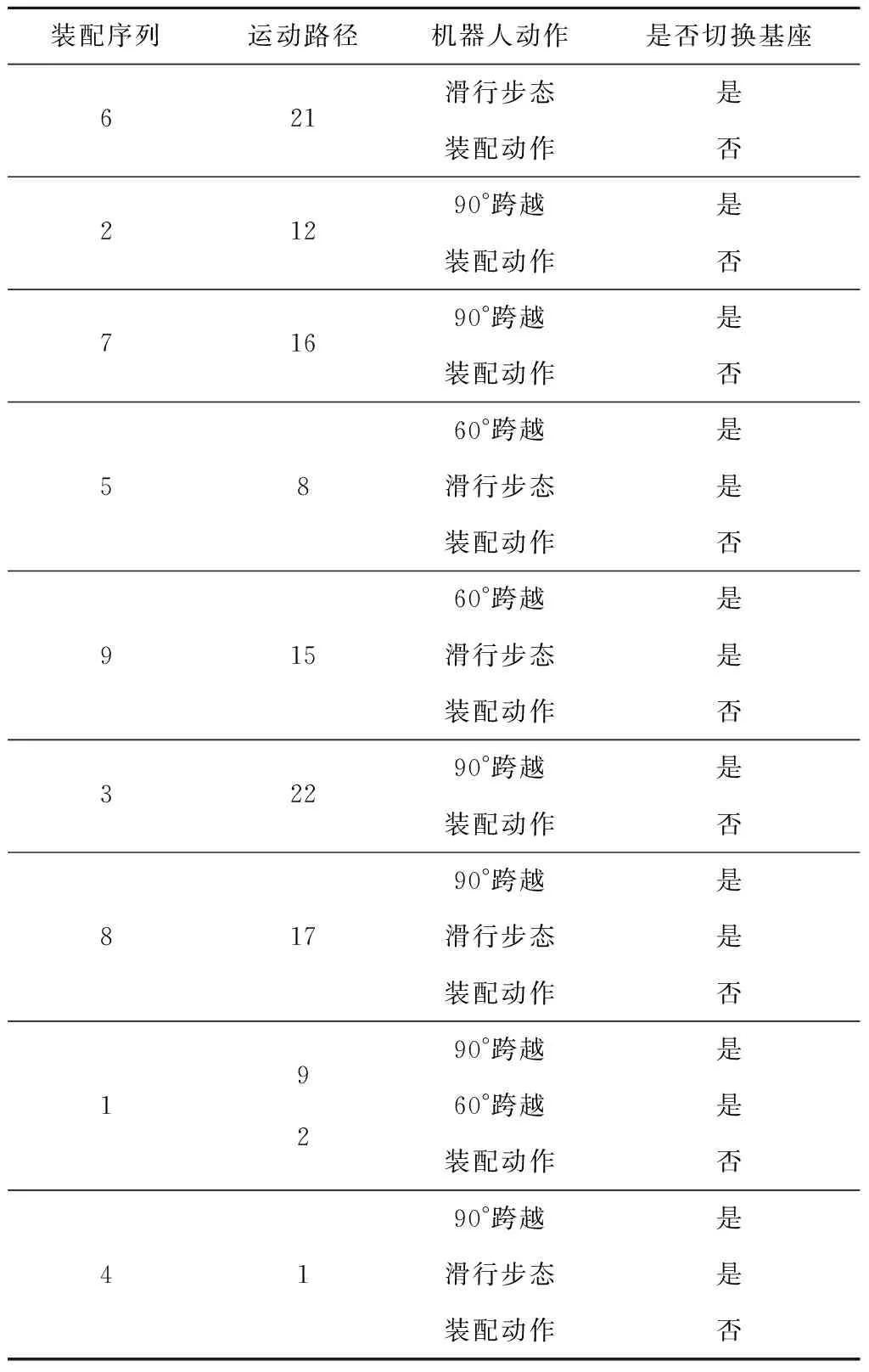
表2 機器人裝配桁架的序列規劃Table 2 Sequence planning of robot assembly truss
圖18展示了機器人在整個過程中的運動路徑變化,與表2中的機器人運動路徑一一對應。
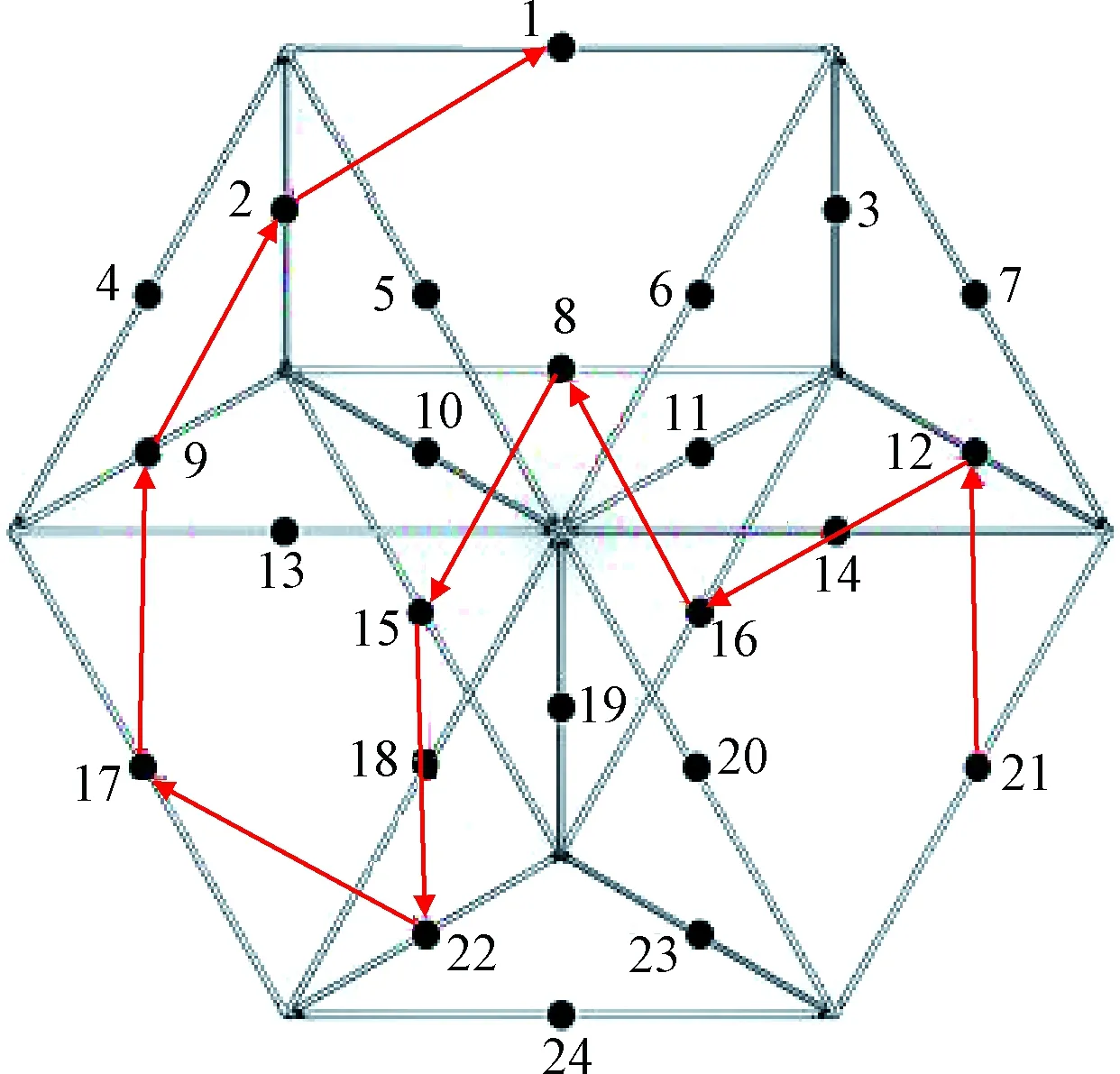
圖18 裝配中的機器人運動路徑規劃圖Fig.18 Robot motion path planning in the assembly process
圖19~圖21展示了整個裝配過程中的關節角、關節控制力矩以及能耗變化。橫坐標的一個刻度代表機器人的一個動作,與表2中規劃機器人動作一一對應。點劃豎線代表末端執行器切換時刻,與表2中是否需要切換末端執行器一一對應。圖19~21可看出機器人關節角運動曲線平滑,所設計控制律跟蹤誤差小,每個階段機器人運動后都回到初始狀態。關節控制力矩可用來指導各關節舵機的選擇。機器人能耗可用來指導機器人能量儲備規劃。
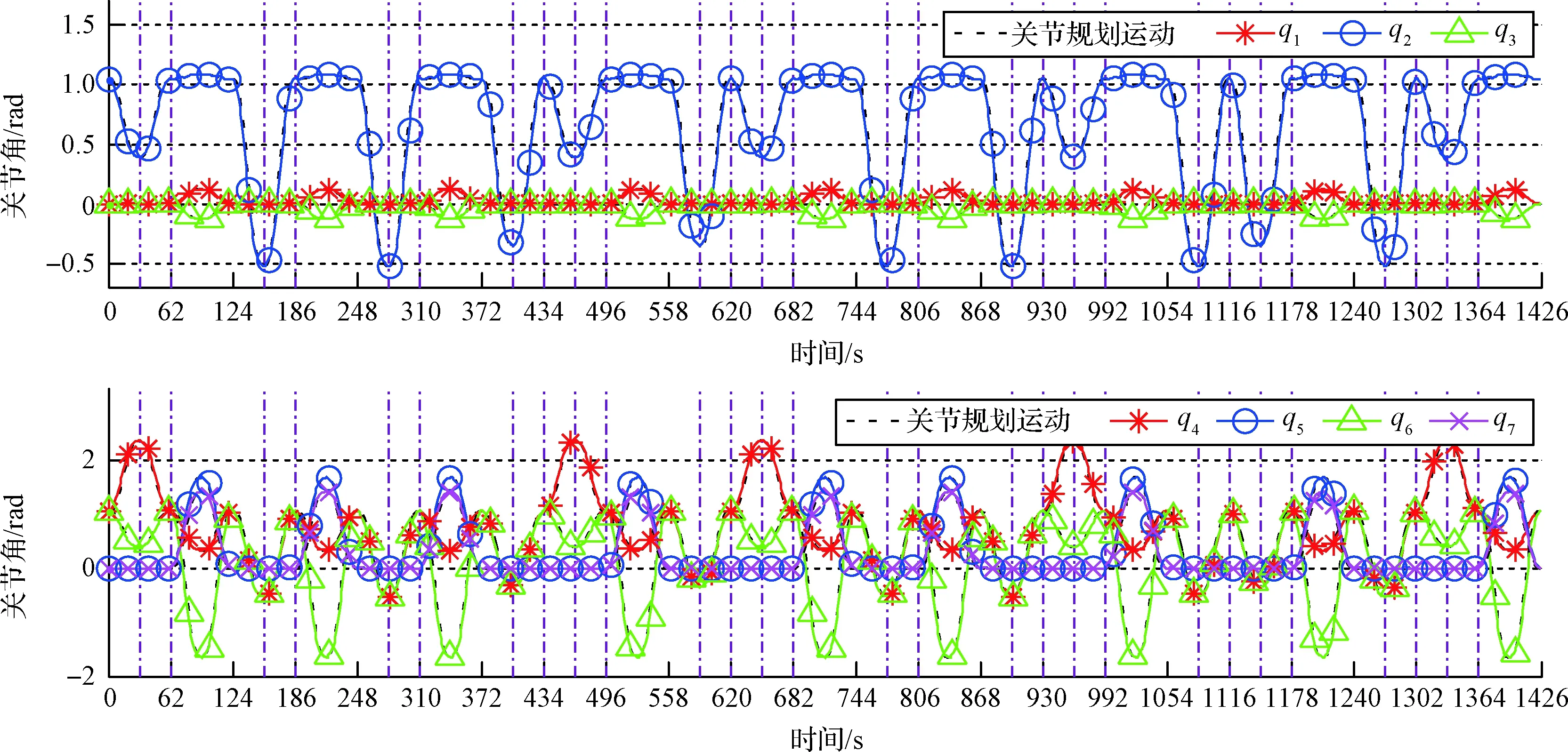
圖19 整個裝配過中的機器人關節角變化圖Fig.19 Joint angle in the whole assembly process
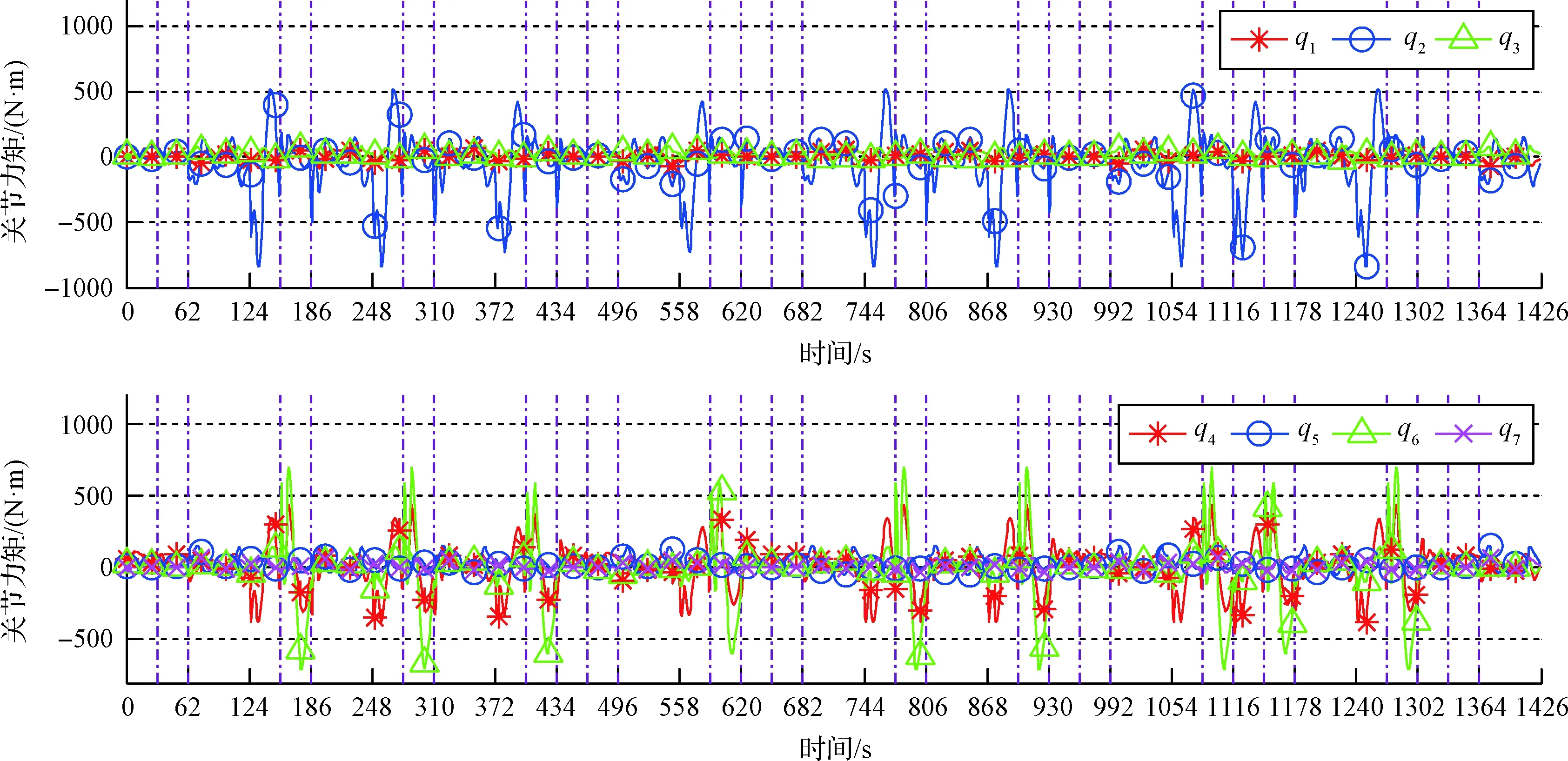
圖20 整個裝配過中的機器人關節控制力矩變化圖Fig.20 Joint control torque in the whole assembly process
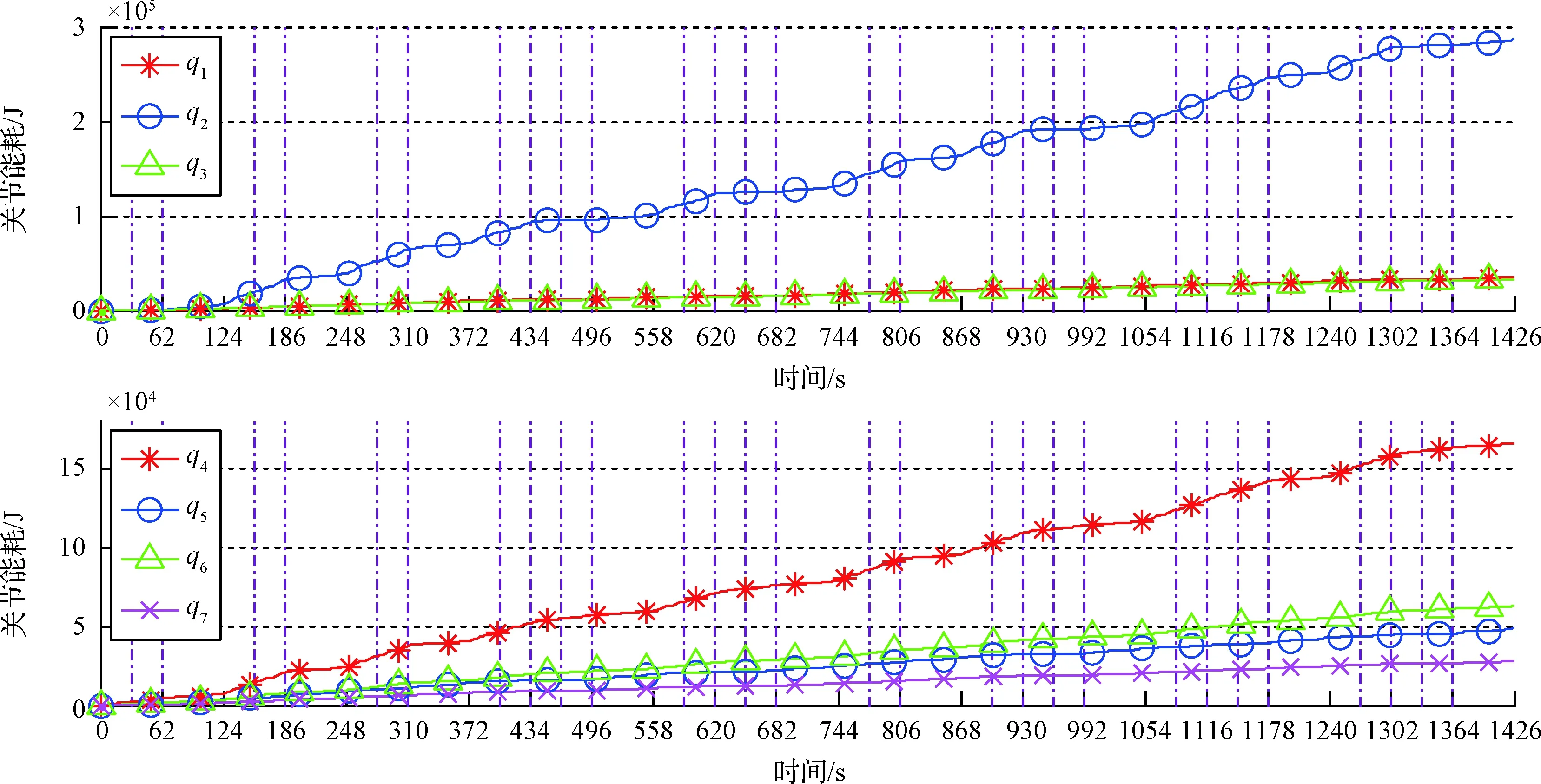
圖21 整個裝配過中的機器人關節能耗變化圖Fig.21 Energy consumption in the whole assembly process
5 結 論
本文針對機器人在軌裝配空間桁架結構的序列規劃問題,提出了一種考慮機器人運動的序列規劃方法。在求解裝配單元最優裝配序列的同時,可給出機器人裝配過程中的規劃與控制序列。首先,設計了在軌裝配的機器人系統并對其建模;然后,設計了任務中機器人的運動規劃與控制器,對機器人滑行步態、異桿跨越步態進行了仿真,關節角變化平穩、控制器跟蹤準確,跟蹤誤差小;并以軸孔裝配為目標,在裝配出現誤差且無視覺輔助的情況下,消除了誤差影響,成功裝配。隨后,建立機器人在軌裝配空間桁架結構的評價指標并尋優。在考慮裝配可行性、裝配穩定性、裝配路徑與裝配能耗的影響下,在得到裝配單元裝配序列的同時,可得到機器人的運動,這對裝配機器人設計與裝配任務規劃具有重要意義。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
公民與法治(2020年11期)2020-07-25 02:02:06
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41