基于STM32的汽車(chē)智能燈光控制系統(tǒng)設(shè)計(jì)
2021-05-26 07:53:00李德英李延康陳希祥
自動(dòng)化與儀表 2021年5期
李德英,李延康,易 濤,陳希祥
(湖南信息學(xué)院 電子科學(xué)與工程學(xué)院,長(zhǎng)沙410151)
隨著人民生活水平的提升,汽車(chē)總量日益增加,而夜間駕駛員不適當(dāng)?shù)臒艄獠僮髟斐山煌ㄊ鹿暑l發(fā)、年均交通事故也隨之上升。如何提高汽車(chē)的安全性、減少交通事故的發(fā)生已經(jīng)成為急需解決的難題[1]。本設(shè)計(jì)能根據(jù)環(huán)境變化而自動(dòng)變換汽車(chē)燈光系統(tǒng),大大減少交通事故的發(fā)生。
1 系統(tǒng)總體設(shè)計(jì)
1.1 系統(tǒng)構(gòu)成
汽車(chē)燈光智能控制系統(tǒng)由燈光模式選擇模塊、智能會(huì)車(chē)模塊、雙操作模塊3 個(gè)模塊組成。STM32F407單片機(jī)做為主控芯片,由超聲波測(cè)距傳感器、光電傳感器、DHT11 溫濕度傳感器等組成環(huán)境檢測(cè)模塊,將檢測(cè)到的外部環(huán)境數(shù)據(jù)通過(guò)A/D 轉(zhuǎn)換電路傳送給單片機(jī)進(jìn)行判斷和處理后發(fā)出相應(yīng)的控制指令,控制車(chē)燈做出相應(yīng)的動(dòng)作,實(shí)現(xiàn)燈光的智能控制。且采用QT 界面開(kāi)發(fā)軟件,設(shè)計(jì)開(kāi)發(fā)了上位機(jī)監(jiān)控界面,通過(guò)UART 串口通訊實(shí)現(xiàn)控制過(guò)程的可視化。本系統(tǒng)具有成本低、功耗低、安全可靠、智能可控等特點(diǎn)。系統(tǒng)組成框圖如圖1所示。
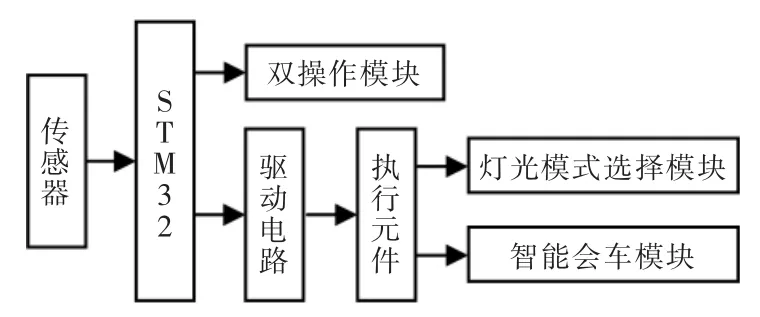
圖1 控制系統(tǒng)的整體結(jié)構(gòu)框圖Fig.1 Overall structure block diagram of control system
1.2 主控芯片選型
STM32F407 單片機(jī)具有高性能、運(yùn)算速度快、功能強(qiáng)大等特點(diǎn)[2],其片上外設(shè)包含AD 轉(zhuǎn)化模塊,以及PWM 脈沖調(diào)寬調(diào)頻模塊,內(nèi)置定時(shí)器等功能模塊,不需要外加擴(kuò)展模塊,最高運(yùn)行速度可達(dá)到168 MHz的工作頻率[3],能夠達(dá)到項(xiàng)目所需的運(yùn)算速度。
2 系統(tǒng)硬件設(shè)計(jì)
本系統(tǒng)由STM32 單片機(jī)、超聲波測(cè)距、光照強(qiáng)度檢測(cè)、溫濕度檢測(cè)、按鍵模塊等組成,其系統(tǒng)的硬件組成如圖2所示。

圖2 系統(tǒng)整體硬件框圖Fig.2 System hardware block diagram
2.1 超聲波測(cè)距電路設(shè)計(jì)
超聲波測(cè)距的實(shí)現(xiàn)原理是在已知超聲波的傳播速度下,發(fā)射一定頻率的聲波,當(dāng)聲波在向前傳播時(shí)遇到障礙物,就會(huì)產(chǎn)生反射聲波[4],由超聲波接收器接收,根據(jù)發(fā)射與接收這一過(guò)程的時(shí)間差,通過(guò)時(shí)間差距離法計(jì)算得到發(fā)射點(diǎn)到障礙物之間的相對(duì)距離,如式(1)所示:

式中:l 為發(fā)射點(diǎn)與障礙物之間距離;T 為從計(jì)時(shí)器獲取聲波發(fā)射與返回的時(shí)間差;C 為聲波速率。
超聲波在空氣中傳播的速率會(huì)隨溫度變化而發(fā)生變化。表1 是波速C 與溫度的對(duì)應(yīng)關(guān)系表,在使用時(shí),可使用溫度補(bǔ)償?shù)姆椒ㄌ岣邷y(cè)距精度。

表1 超聲波波速與溫度的關(guān)系表Tab.1 Relationship between ultrasonic wave velocity and temperature
STM32F407 給US_025 超聲波測(cè)距傳感器模塊提供10 kHz 的時(shí)鐘頻率,經(jīng)放大器放大、鎖相環(huán)電路檢波處理后達(dá)到40 kMz[5]。超聲波發(fā)射模塊發(fā)射聲波,Echo 引腳變成高電平,觸發(fā)相應(yīng)中斷程序,systick 計(jì)時(shí)器開(kāi)始計(jì)時(shí);當(dāng)接收器接收到反射波,Echo 引腳變成低電平[6],中斷結(jié)束,得到發(fā)射和接收的時(shí)間差,再通過(guò)算法計(jì)算得到車(chē)距數(shù)據(jù),其原理如圖3所示。
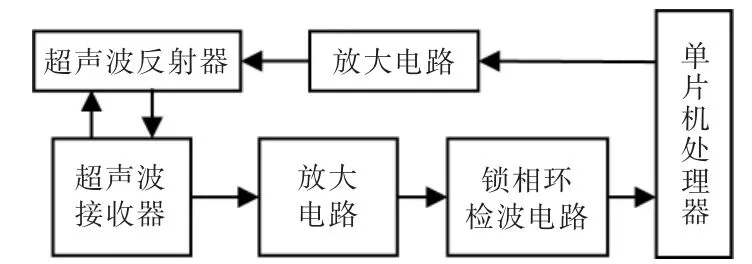
圖3 超聲波測(cè)距原理框圖Fig.3 Schematic diagram of ultrasonic ranging
超聲波發(fā)射電路原理如圖4所示。超聲波發(fā)射電路核心是由反相器74LS04 和超聲波發(fā)射換能器T 組成[7],40 kHz 的方波信號(hào)一路通過(guò)一級(jí)反向器傳輸至超聲波換能器一端電極,另一路通過(guò)兩級(jí)反向器之后,送到超聲波環(huán)能器的另一端電極。單片機(jī)時(shí)鐘脈沖信號(hào)輸出端采用推挽方式,提高電平輸出能力和超聲波發(fā)射信號(hào)的強(qiáng)度。信號(hào)流過(guò)兩個(gè)反相器并聯(lián)的二級(jí)反相器,可提高檢超聲波發(fā)射電路的驅(qū)動(dòng)能力[8]。圖中電阻R10和R11可提高反向器驅(qū)動(dòng)能力以及增強(qiáng)超聲波環(huán)能器的阻尼效果,縮短自由震蕩時(shí)間[9]。

圖4 超聲波發(fā)射電路原理圖Fig.4 Ultrasonic emission circuit schematic diagram
本設(shè)計(jì)超聲波檢測(cè)模塊使用的超聲波換能器是壓電式的,其內(nèi)部核心器件是1 個(gè)換能板和2 個(gè)檢測(cè)聲波震動(dòng)的壓電晶片[10]。當(dāng)做發(fā)射器時(shí),超聲波換能器兩端電極加上脈沖信號(hào),當(dāng)脈沖頻率與壓電晶片的固有頻率一致時(shí),晶片就會(huì)產(chǎn)生共振現(xiàn)象,帶動(dòng)共振板振動(dòng)產(chǎn)生超聲波[11];當(dāng)它做接收器時(shí),兩端電極沒(méi)有脈沖信號(hào)加持,當(dāng)共振板接收到超聲波信號(hào),會(huì)產(chǎn)生振動(dòng),帶動(dòng)壓電晶片振動(dòng),壓電晶片內(nèi)部就會(huì)將振動(dòng)信號(hào)轉(zhuǎn)換為微弱的電信號(hào),經(jīng)過(guò)放大電路,就能實(shí)現(xiàn)超聲波接收功能。發(fā)射換能器與接收換能器的電路結(jié)構(gòu)不同[12],超聲波接收器電路圖如圖5所示。

圖5 超聲波接收電路圖Fig.5 Ultrasonic receiving circuit diagram
2.2 光照強(qiáng)度檢測(cè)電路設(shè)計(jì)
光照強(qiáng)度是將光敏電阻與恒值電阻串聯(lián),利用光敏電阻的特性進(jìn)行分壓檢測(cè),讀取分壓電壓后直接以AN 模擬信號(hào)的方式輸入至單片機(jī)中[15],以達(dá)到檢測(cè)光照強(qiáng)度的效果,在程序中可以通過(guò)上位機(jī)設(shè)定一個(gè)閾值,檢測(cè)環(huán)境的光照強(qiáng)度有沒(méi)有達(dá)到設(shè)定值,以此判定環(huán)境光線是較暗還是良好,單片機(jī)發(fā)布控制指令驅(qū)動(dòng)LED 燈光模塊做出相應(yīng)的動(dòng)作。其光照檢測(cè)電路設(shè)計(jì)圖如圖6所示。

圖6 光照檢測(cè)電路設(shè)計(jì)圖Fig.6 Light detection circuit diagram
2.3 溫濕度檢測(cè)電路設(shè)計(jì)
采用DHT11 溫濕度一體數(shù)字化傳感器,對(duì)濕度數(shù)據(jù)進(jìn)行采集,DHT11 傳感器核心測(cè)量元件是電阻式的測(cè)濕元件和NTC 測(cè)溫元件[13],在其內(nèi)部有一個(gè)高性能的8 位單片機(jī)控制。通過(guò)相應(yīng)的電路連接就能達(dá)到實(shí)時(shí)采集模塊所處環(huán)境的溫濕度數(shù)據(jù)[14]。
3 系統(tǒng)軟件設(shè)計(jì)
3.1 總體程序設(shè)計(jì)
系統(tǒng)要對(duì)DHT11 溫濕度傳感器、光電傳感器以及超聲波測(cè)距傳感器和按鍵觸發(fā)等輸入模塊采集到的數(shù)據(jù)進(jìn)行分析處理后,發(fā)出控制指令,控制執(zhí)行元件,實(shí)現(xiàn)汽車(chē)燈光的智能控制,圖7 為控制系統(tǒng)主體流程。

圖7 主體邏輯流程Fig.7 Main logic flow chart
3.1.1 系統(tǒng)燈光模式選擇模塊
燈光模式選擇模塊根據(jù)光敏模塊采集到的數(shù)據(jù)與閾值進(jìn)行比較確定開(kāi)啟遠(yuǎn)光燈還是近光燈,通過(guò)濕度傳感器模塊采集的數(shù)據(jù)與閾值進(jìn)行比對(duì)確定是否需要開(kāi)啟霧燈及警示燈,其程序流程如圖8所示。
3.1.2 系統(tǒng)燈光智能會(huì)車(chē)模塊
燈光智能會(huì)車(chē)模塊需要調(diào)用光敏檢測(cè)模塊和超聲波測(cè)距模塊,在遠(yuǎn)光燈模式行駛,當(dāng)測(cè)距模塊檢測(cè)到前方來(lái)車(chē)時(shí),遠(yuǎn)光燈的亮度會(huì)根據(jù)車(chē)距的縮小向近光燈轉(zhuǎn)化,燈光的亮度根據(jù)相對(duì)車(chē)距成正比變化,車(chē)距越小燈光亮度越趨近于近光燈,過(guò)程中會(huì)車(chē)光敏電阻檢測(cè)對(duì)向車(chē)輛發(fā)出的光線強(qiáng)度,將檢測(cè)數(shù)據(jù)與閾值比較,大于閾值則判斷對(duì)向車(chē)輛未切換近光燈,系統(tǒng)開(kāi)啟2 s 提示燈光。其程序流程如圖9所示。
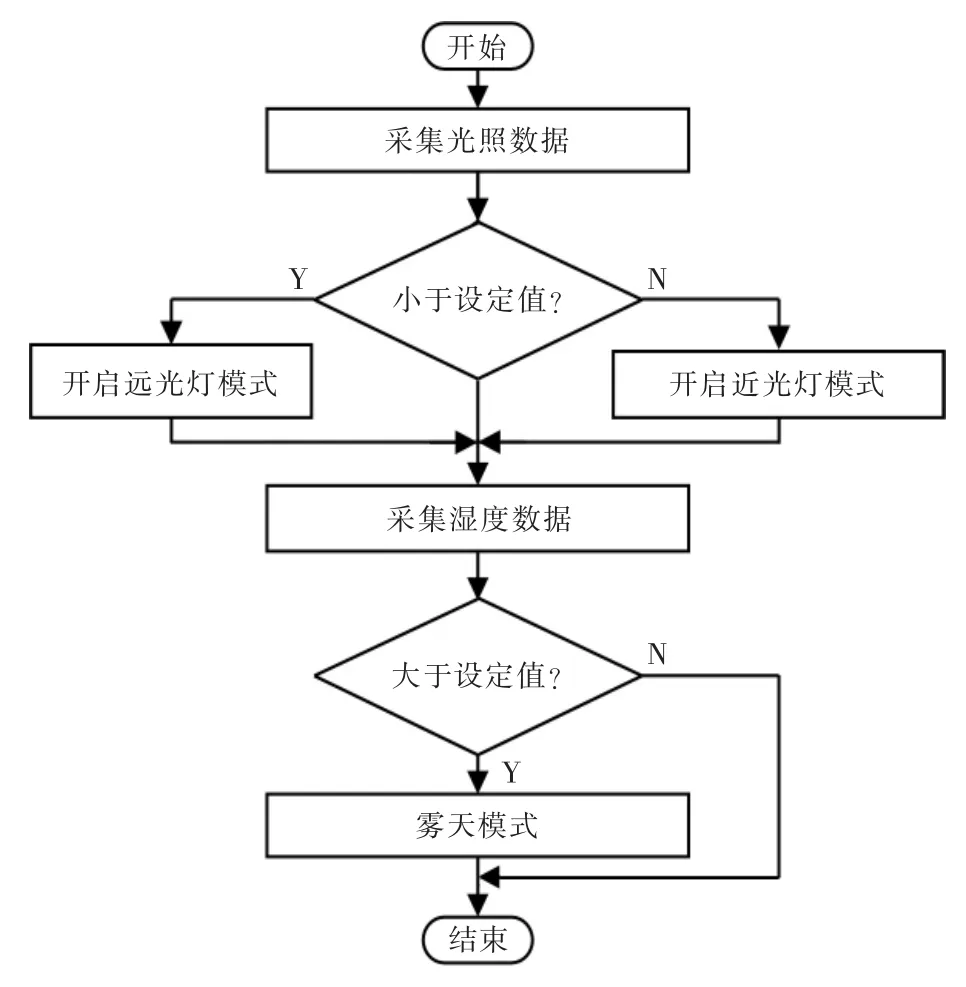
圖8 燈光選擇模程序流程Fig.8 Flow chart of lighting selection mode
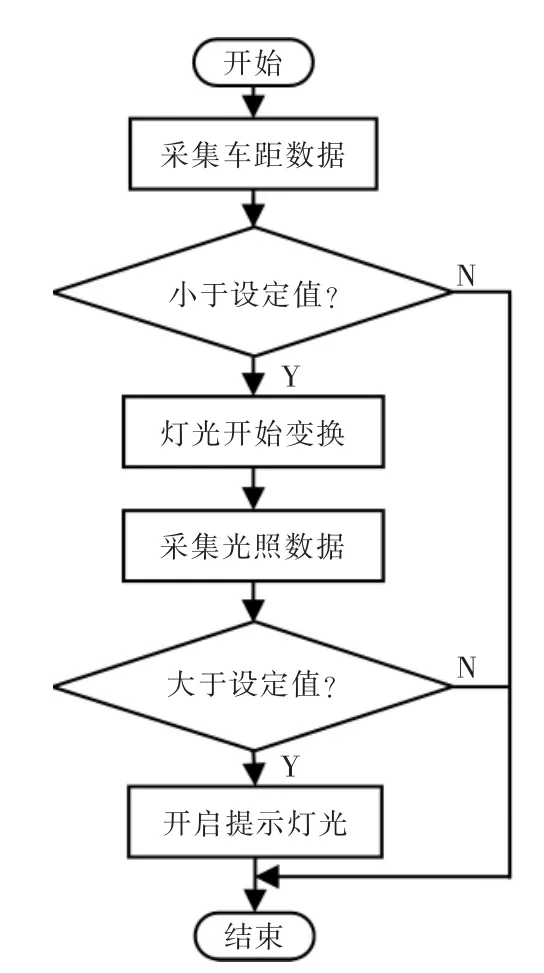
圖9 燈光智能會(huì)車(chē)模塊程序流程Fig.9 Intelligent meeting flow chart
3.2 上位機(jī)監(jiān)控界面設(shè)計(jì)
上位機(jī)監(jiān)控系統(tǒng)需實(shí)現(xiàn)STM32 單片機(jī)采集數(shù)據(jù)的可視化以及各閾值設(shè)定功能等。需實(shí)現(xiàn)上、下位機(jī)間通訊、制定通訊協(xié)議、上位機(jī)監(jiān)控主界面的布局設(shè)計(jì)以及上位機(jī)接收數(shù)據(jù)后的數(shù)據(jù)處理與顯示。本設(shè)采用通用異步收發(fā)傳輸器(UART)進(jìn)行全雙工異步串行通訊方式實(shí)現(xiàn)數(shù)據(jù)的傳輸與接收[16]。
4 系統(tǒng)仿真測(cè)試
在光電傳感器上加照射光線或者用不透光盒子罩住,可模擬車(chē)輛夜間行駛的光照環(huán)境的優(yōu)劣。用濕紙巾捂住溫濕度傳感器,檢測(cè)的濕度數(shù)據(jù)會(huì)發(fā)生變化,可模擬汽車(chē)是否行駛在霧天或者非霧天。該模塊的實(shí)物模型控制效果如圖10所示。上位機(jī)監(jiān)控效果如圖11所示,笑臉圖標(biāo)代表相應(yīng)車(chē)燈點(diǎn)亮,方塊則代表車(chē)燈未點(diǎn)亮。當(dāng)系統(tǒng)檢測(cè)數(shù)據(jù)小于光照強(qiáng)度設(shè)定值時(shí),系統(tǒng)判斷為汽車(chē)行駛于光照條件較好的環(huán)境中,濕度檢測(cè)數(shù)據(jù)大于設(shè)定值時(shí),系統(tǒng)判斷為汽車(chē)行駛于霧天,此時(shí)系統(tǒng)如圖11所示開(kāi)啟近光燈,示輪廓燈,霧燈以及警示燈。

圖10 燈光模式選擇效果圖Fig.10 Lighting mode selection renderings

圖11 燈光模式選擇上位機(jī)監(jiān)控效果圖Fig.11 Light mode selection of the upper computer renderings
5 結(jié)語(yǔ)
本系統(tǒng)以STM32F407 集成芯片作為核心,以電源電路、傳感器、最小系統(tǒng)、按鍵電路以及執(zhí)行機(jī)構(gòu)等構(gòu)成外圍電路。設(shè)計(jì)了系統(tǒng)的主程序和各功能模塊流程圖、開(kāi)發(fā)了QT 上位機(jī)監(jiān)控界面,并采用自定義的通訊協(xié)議實(shí)現(xiàn)上位機(jī)于單片機(jī)的通訊,實(shí)現(xiàn)系統(tǒng)控制以及數(shù)據(jù)采集的可視化效果。經(jīng)實(shí)踐證明,該控制系統(tǒng)穩(wěn)定可靠,故障率低,人機(jī)界面友好,操作方便,具有較高的實(shí)用價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45