基于5G技術(shù)的無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)方法
2021-05-26 07:53:06陳洪亮紀(jì)姍姍李志雷孫同展沈宏亮
自動(dòng)化與儀表 2021年5期
陳洪亮,紀(jì)姍姍,李志雷,孫同展,沈宏亮
(1.國(guó)網(wǎng)河北省電力有限公司 雄安新區(qū)供電公司,保定071800;2.天津市普迅電力信息技術(shù)有限公司,天津300000;3.國(guó)網(wǎng)河北省電力有限公司,石家莊050000)
受到氣流擾動(dòng)和目標(biāo)自身運(yùn)動(dòng)因素的影響,無(wú)人機(jī)拍攝的模糊度較大,需要結(jié)合目標(biāo)參數(shù)識(shí)別和圖像尋優(yōu)控制的方法進(jìn)行無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)控制,實(shí)現(xiàn)無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)識(shí)別,提高航拍的精度,因此,無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)技術(shù)受到人們的極大關(guān)注。傳統(tǒng)方法中,文獻(xiàn)[1]對(duì)無(wú)人機(jī)飛行軌跡跟蹤控制,對(duì)無(wú)人機(jī)的定常運(yùn)動(dòng)進(jìn)行運(yùn)動(dòng)平衡分解,對(duì)無(wú)人機(jī)飛行軌跡的多傳感器陣列姿態(tài)參量全部量化信息進(jìn)行自適應(yīng)參量估計(jì),實(shí)現(xiàn)無(wú)人機(jī)飛行軌跡跟蹤控制,提高了飛行穩(wěn)定性和抗擾動(dòng)性;文獻(xiàn)[2]基于一致性理論,對(duì)多無(wú)人機(jī)編隊(duì)控制技術(shù)進(jìn)行了研究,進(jìn)行協(xié)同編隊(duì)飛行控制技術(shù)研究;文獻(xiàn)[3]采用相干分布源采集飛行姿態(tài)數(shù)據(jù),提出基于波束空間二維譜峰搜索的無(wú)人機(jī)飛行魯棒性控制算法,進(jìn)行無(wú)人機(jī)飛行控制,較好地處理無(wú)人機(jī)不確定動(dòng)態(tài)運(yùn)動(dòng)系統(tǒng)的控制問(wèn)題。
但傳統(tǒng)方法進(jìn)行無(wú)人機(jī)拍攝速率校準(zhǔn)的環(huán)境適應(yīng)度水平不高,校準(zhǔn)能力不強(qiáng)。針對(duì)上述問(wèn)題,本文提出基于5G技術(shù)的無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)方法。以無(wú)人機(jī)拍攝圖像的幀跟蹤識(shí)別模型為依據(jù),在5G 通信背景下實(shí)現(xiàn)對(duì)無(wú)人機(jī)拍攝的圖像信息傳輸控制,采用最大似然估計(jì)和無(wú)人機(jī)航拍運(yùn)動(dòng)視頻跟蹤補(bǔ)償控制的方法,實(shí)現(xiàn)無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn),展示了本文方法在提高無(wú)人機(jī)拍攝能力方面的優(yōu)越性能。
1 無(wú)人機(jī)拍攝的軌跡跟蹤和圖像采樣識(shí)別
1.1 地形網(wǎng)格軌跡分布式重構(gòu)
為了實(shí)現(xiàn)基于5G技術(shù)的無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn),進(jìn)行無(wú)人機(jī)拍攝的視覺(jué)信息跟蹤識(shí)別。
首先,采用視頻幀差補(bǔ)償控制方法進(jìn)行無(wú)人機(jī)拍攝的圖像像素特征分集和誤差補(bǔ)償設(shè)計(jì)[4-6],無(wú)人機(jī)拍攝的軌跡跟蹤示意圖如圖1所示。
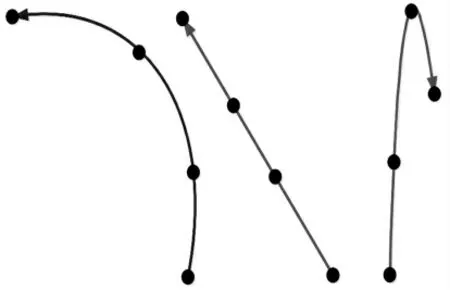
圖1 無(wú)人機(jī)拍攝軌跡跟蹤示意圖Fig.1 Sketch map of a track taken by UAV
無(wú)人機(jī)拍攝的軌跡跟蹤形式,采用模板更新規(guī)則,結(jié)合幀補(bǔ)償控制技術(shù),設(shè)無(wú)人機(jī)拍攝的軌跡映射為g(b),分析無(wú)人機(jī)拍攝的速率跟蹤控制的誤差補(bǔ)償函數(shù)[7],通過(guò)樣本空間重構(gòu),在圖像中將目標(biāo)對(duì)象分類(lèi)和定位,得到無(wú)人機(jī)拍攝的層次分割值為

式中:mt為無(wú)人機(jī)跟蹤軌跡參數(shù);ε 為無(wú)人機(jī)拍攝速率控制參數(shù)。采用深層的特征信息分析方法,分析無(wú)人機(jī)航拍的圖像區(qū)域分塊匹配值[8],得到無(wú)人機(jī)航拍的圖像分布特征量表示為

層次化分割和網(wǎng)格模板匹配,此時(shí)的無(wú)人機(jī)航拍的圖像像素點(diǎn)的N 個(gè)子塊鄰域?yàn)閜,融合紋理結(jié)構(gòu),分析無(wú)人機(jī)航拍的圖像分布區(qū)域融合值,進(jìn)行模糊度匹配,得到無(wú)人機(jī)航拍的軌跡分布式融合參數(shù)為G(x,y,t),根據(jù)背景中對(duì)無(wú)人機(jī)航拍的圖像的干擾分布,在不考慮外界因素干擾的情況下,進(jìn)行無(wú)人機(jī)航拍的圖像識(shí)別,得到無(wú)人機(jī)航拍的軌跡分布為f(gi),結(jié)合特征尺度分解的方法,得到無(wú)人機(jī)航拍的圖像尺度分割值為

采用邊界層細(xì)化分割方法,得到無(wú)人機(jī)拍攝的視覺(jué)劃分值,通過(guò)4×4 的像素塊分割,得到無(wú)人機(jī)拍攝的軌跡跟蹤網(wǎng)格區(qū)域I 劃分為(W/2)×(H/2)個(gè)子塊,此時(shí)的無(wú)人機(jī)拍攝的圖譜參數(shù)融合結(jié)果為

式中:r(e)為無(wú)人機(jī)拍攝像素特征參數(shù)。以此實(shí)現(xiàn)無(wú)人機(jī)拍攝的軌跡跟蹤和圖像檢測(cè),通過(guò)地形網(wǎng)格的細(xì)節(jié)分布,在2×2 個(gè)像素點(diǎn)中實(shí)現(xiàn)對(duì)無(wú)人機(jī)航拍的地形網(wǎng)格軌跡分布式重構(gòu)。
1.2 無(wú)人機(jī)航拍的圖像幀跟蹤識(shí)別模型
提取無(wú)人機(jī)拍攝圖像的灰度像素特征分量,進(jìn)行關(guān)聯(lián)規(guī)則特征參數(shù)融合,分析無(wú)人機(jī)拍攝圖像的幀跟蹤識(shí)別模型。
首先,結(jié)合5G 通信技術(shù),設(shè)無(wú)人機(jī)拍攝圖像的信息增強(qiáng)控制值為正,得到多分辨率地形渲染控制技術(shù),得到尺度特征量為

式中:Gij(x,y)為無(wú)人機(jī)拍攝圖像的尺度信息融合結(jié)果參數(shù);(xij,yij)為無(wú)人機(jī)航拍的圖像區(qū)域模板匹配值。根據(jù)地形值幾何精度測(cè)量,進(jìn)行航拍速率的自適應(yīng)控制[9],采用無(wú)人機(jī)拍攝像素特征參數(shù),進(jìn)行特征分解,得到無(wú)人機(jī)航拍的圖像區(qū)域分布灰度特征量為

引入無(wú)人機(jī)航拍的軌跡分布值,設(shè)Δi 為數(shù)據(jù)覆蓋的地理范圍分布;vr為無(wú)人機(jī)航拍的圖像分布區(qū)域檢測(cè)融合參數(shù),新增數(shù)據(jù)覆蓋范圍,結(jié)合視覺(jué)跟蹤識(shí)別特征檢測(cè),得到無(wú)人機(jī)航拍的圖像像素點(diǎn)檢測(cè)值為q(y),以檢測(cè)值為圖像識(shí)別的最終參數(shù),可知無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)的像素跟蹤識(shí)別關(guān)系如圖2所示。
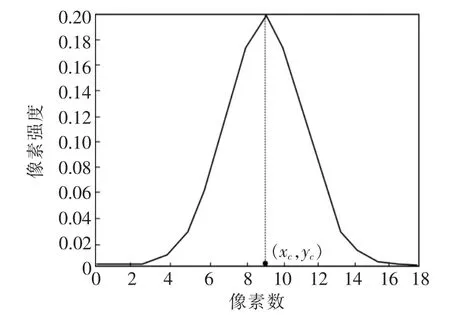
圖2 無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)的像素跟蹤識(shí)別關(guān)系Fig.2 Relationship of pixel tracking recognition for automatic calibration of UAV shooting rate
在圖2所示的無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)關(guān)系中,通過(guò)引入不同的尺度因子[10],得到核函數(shù)描述為

式中:λ1,λ2是無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)參數(shù),在3×3 網(wǎng)格模型中進(jìn)行無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)的參數(shù)融合;Kσ為無(wú)人機(jī)拍攝速率參數(shù)尺度偏移σ 系數(shù)。通過(guò)選擇σ 的初始值,結(jié)合Harris 角點(diǎn)檢測(cè)實(shí)現(xiàn)對(duì)無(wú)人機(jī)拍攝速率參數(shù)檢測(cè),實(shí)現(xiàn)無(wú)人機(jī)航拍的圖像識(shí)別。
2 無(wú)人機(jī)拍攝速率校準(zhǔn)優(yōu)化
2.1 基于5G 的無(wú)人機(jī)拍攝的圖像信息輸出
分析無(wú)人機(jī)拍攝圖像的幀跟蹤識(shí)別模型,在5G通信背景下對(duì)無(wú)人機(jī)拍攝的圖像信息傳輸控制[11]。
設(shè)參數(shù)解析控制下無(wú)人機(jī)拍攝的圖像信息傳輸?shù)哪:群瘮?shù)為

式中:ec為無(wú)人機(jī)航拍的圖像識(shí)別度參數(shù);a 為無(wú)人機(jī)拍攝速率參數(shù)校準(zhǔn)的高斯核的標(biāo)準(zhǔn)差。結(jié)合無(wú)人機(jī)拍攝速率信息解析控制結(jié)果為
式中:i 為無(wú)人機(jī)拍攝速率配準(zhǔn)的邊緣像素值g(i)處的采樣信息;Ω 為無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)的5G傳輸信道參數(shù)。獲取數(shù)據(jù)的實(shí)際覆蓋范圍,得到速率參數(shù)數(shù)據(jù)分布的點(diǎn)矩陣為

根據(jù)新增數(shù)據(jù)覆蓋范圍渲染結(jié)果,結(jié)合空間欠采樣技術(shù),得到無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)的測(cè)量結(jié)果為A(e),τ 為目標(biāo)參數(shù),結(jié)合相鄰特征比對(duì),得到無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)的對(duì)比信息為d(r)。對(duì)提取的弱光照?qǐng)D像視覺(jué)傳達(dá)信息實(shí)現(xiàn)模糊度融合和辨識(shí)處理,動(dòng)態(tài)加載地形數(shù)據(jù),得到無(wú)人機(jī)拍攝速率與地形分布的相關(guān)關(guān)系為

式中:Zj為動(dòng)態(tài)加載地形數(shù)據(jù)參數(shù);A 表示無(wú)人機(jī)拍攝速率分布特征量,它為N 階方陣,即A={ai,j,0<i,j<N},通過(guò)相鄰幀補(bǔ)償,得到無(wú)人機(jī)拍攝速率參數(shù)估計(jì)的均值為

式中:xT是無(wú)人機(jī)拍攝速率分布的候選目標(biāo)像素;?為分?jǐn)?shù)階細(xì)分的時(shí)間間隔。
2.2 無(wú)人機(jī)拍攝速率校準(zhǔn)輸出
根據(jù)5G 通信的信道差異性特征量進(jìn)行負(fù)載均衡調(diào)度,進(jìn)行無(wú)人機(jī)拍攝的速率參數(shù)估計(jì),通過(guò)無(wú)人機(jī)拍攝的圖像的邊緣灰度信息解析控制結(jié)果,獲得無(wú)人機(jī)拍攝速率解融合分布結(jié)果為

式中:cm為無(wú)人機(jī)拍攝速率校準(zhǔn)的適應(yīng)度函數(shù),采用RGB 特征分解的方法,得到無(wú)人機(jī)拍攝速率校準(zhǔn)的自適應(yīng)統(tǒng)計(jì)特征分量為;在細(xì)分的最小執(zhí)行單元中[12],得到無(wú)人機(jī)拍攝速率參數(shù)估計(jì)的最小二乘估計(jì)特征量為(Im,無(wú)人機(jī)拍攝速率參數(shù)估計(jì)的適應(yīng)度參數(shù)表示為

式中:βi表示無(wú)人機(jī)拍攝速率參數(shù)估計(jì)的離散度;t(f)是無(wú)人機(jī)拍攝速率校準(zhǔn)的自適應(yīng)閾值分割系數(shù)[13-15];wi是無(wú)人機(jī)拍攝速率校準(zhǔn)的特征尺度;P(x,y)iv和P(x,y)if分別是無(wú)人機(jī)拍攝速率校準(zhǔn)的檢測(cè)統(tǒng)計(jì)特征量。以該統(tǒng)計(jì)特征量為校正的最優(yōu)值,實(shí)現(xiàn)對(duì)無(wú)人機(jī)拍攝速率自動(dòng)匹配校準(zhǔn),實(shí)現(xiàn)的仿真結(jié)果如圖3所示。
圖3 無(wú)人機(jī)拍攝速率自動(dòng)匹配校準(zhǔn)的仿真結(jié)構(gòu)圖Fig.3 Simulation structure diagram of automatic matching and calibration of UAV shooting rate
3 仿真測(cè)試與結(jié)果分析
為了測(cè)試本文方法在實(shí)現(xiàn)無(wú)人機(jī)拍攝速率自動(dòng)匹配校準(zhǔn)中的應(yīng)用性能,采用Matlab 進(jìn)行仿真測(cè)試。
以大疆御2 無(wú)人機(jī)為實(shí)驗(yàn)機(jī)器,在DJI GO4 APP 中設(shè)置好各項(xiàng)視頻參數(shù),采集實(shí)驗(yàn)數(shù)據(jù),此時(shí),對(duì)無(wú)人機(jī)拍攝速率參數(shù)采集的樣本數(shù)為3600,地形網(wǎng)格分布為120×120,無(wú)人機(jī)拍攝的高程數(shù)據(jù)采樣精度為5 m,將上述參數(shù)設(shè)定輸入到仿真平臺(tái)中,顯示出無(wú)人機(jī)分布的仿真示意圖如圖4所示。
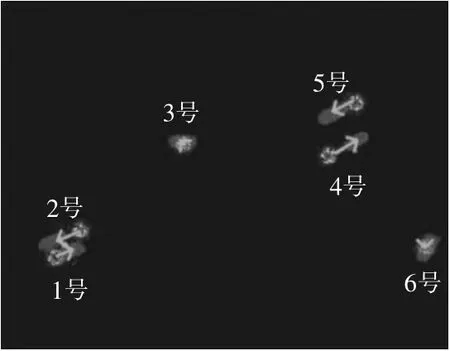
圖4 無(wú)人機(jī)分布的仿真示意圖Fig.4 Simulation sketch of UAV distribution
無(wú)人機(jī)拍攝點(diǎn)為6 個(gè),其拍攝速率不同,因此運(yùn)動(dòng)軌跡不同,所以,為了確定變量和定量,在本次仿真中,以圖4 的單幀單次運(yùn)動(dòng)軌跡為標(biāo)準(zhǔn),在相同的拍攝速率下,進(jìn)行無(wú)人機(jī)拍攝速率自動(dòng)匹配校準(zhǔn),得到校準(zhǔn)結(jié)果如圖5 示。
分析圖5 得知,由于本文方法采用視頻幀差補(bǔ)償控制方法進(jìn)行無(wú)人機(jī)拍攝的圖像像素特征分集和誤差補(bǔ)償設(shè)計(jì),其跟蹤效果明顯高于其他兩種方法,為有效實(shí)現(xiàn)無(wú)人機(jī)拍攝速率自動(dòng)匹配校準(zhǔn)提供基礎(chǔ)。
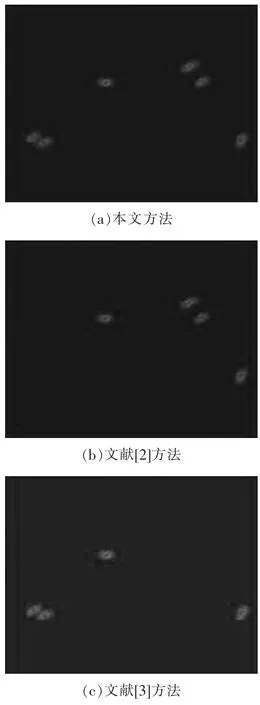
圖5 無(wú)人機(jī)拍攝點(diǎn)跟蹤效果對(duì)比Fig.5 Comparison of the tracking effect of UAV shooting point
以初始視頻參數(shù)為對(duì)照,以仿真結(jié)果為依據(jù),測(cè)試不同方法進(jìn)行無(wú)人機(jī)拍攝速率校準(zhǔn)的性能,得到測(cè)試結(jié)果如圖6所示。
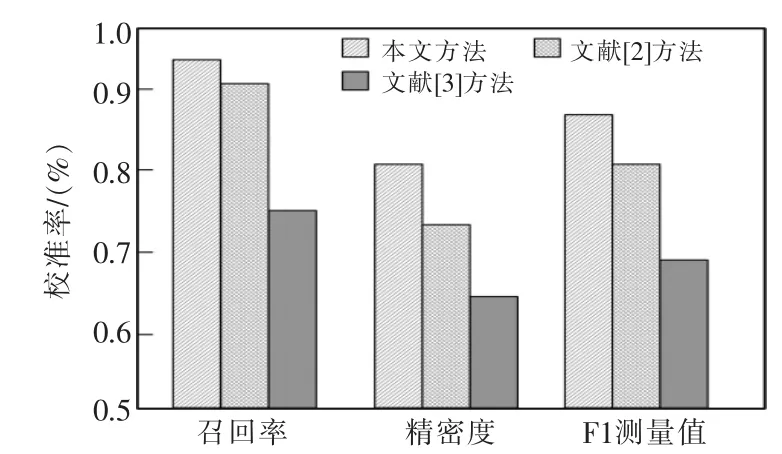
圖6 校準(zhǔn)性能對(duì)比測(cè)試Fig.6 Calibration performance comparison test
分析圖6 得知,本文方法進(jìn)行無(wú)人機(jī)拍攝速率校準(zhǔn)時(shí),與其它方法相比,其進(jìn)行了無(wú)人機(jī)拍攝圖像的信息增強(qiáng)控制,其初始校準(zhǔn)點(diǎn)和最終校準(zhǔn)點(diǎn)的擬合程度較高,以此提高了準(zhǔn)確率和數(shù)據(jù)召回率,降低了輸出均方根誤差,其校準(zhǔn)性能得到保證。
4 結(jié)語(yǔ)
本文提出基于5G技術(shù)的無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)方法,通過(guò)關(guān)聯(lián)規(guī)則特征參數(shù)融合的方法,構(gòu)建無(wú)人機(jī)拍攝圖像的幀跟蹤識(shí)別模型,結(jié)合5G 通信技術(shù),實(shí)現(xiàn)對(duì)無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)且無(wú)人機(jī)拍攝速率自動(dòng)校準(zhǔn)的輸出性能較好,無(wú)人機(jī)拍攝點(diǎn)的跟蹤和圖像檢測(cè)準(zhǔn)確性較高。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56