一種基于數據分析的中國典型切入場景重現方法
2021-05-28 12:37:44葉楓寶鶴鵬袁悅王磊
現代計算機 2021年10期
葉楓,寶鶴鵬,袁悅,王磊
(1.上海汽車集團股份有限公司,上海201804;2.中國汽車技術研究中心有限公司,天津300300)
0 引言
駕駛員切入行為一直都是智能網聯汽車自動駕駛功能開發和測試的熱點、難點與痛點,特別是在中國,不合理切入、違法違章切入行為突出,每年由切入導致的交通擁堵和交通事故現象頻發,使得切入行為成為交通道路上最大的安全隱患之一。在汽車智能化、網聯化的大背景下,在車聯網行業迅速崛起的趨勢下,使得各種車輛數據更易獲取,這也為駕駛員切入場景的研究創造了極為有利的環境。然而對駕駛員的切入場景進行分析是一件非常困難、不易操作的事情,一方面得需要大量精密、可靠的數據來源,另一方面還需要成熟、穩定的科學理論與現實情況充分融合。面對這一難題,中國典型切入場景的切入類型、數據分布、切入軌跡的研究就成為了自動駕駛系統開發和測試的必要基礎,尤其是切入場景的測試用例設計也成為保證自動駕駛系統在中國復雜道路上安全駕駛的必要。
從產品功能定義開發到感知、控制決策算法的開發都需要具有中國特色的典型道路場景數據的輸入來保證開發的自動駕駛功能符合中國的道路環境、駕駛習慣和標準法規要求;仿真測試-場地測試-封閉區域測試-實車道路測試等測試階段均需要場景輸入以保證最基本的安全性。在自動駕駛汽車測試與驗證領域,無論是國際還是國內,主流的趨勢和看法是重點解決基于場景的安全驗證方法問題,目前,在我國,針對L2/L3級自動駕駛汽車封閉場地測試場景的研究與應用,多是與測試車跟車、循線有關,而對測試車切入場景的研究相對較少,在封閉場地的切入場景測試更是少見,主要的技術難點和突破點在于對本車切入軌跡的研究。對標國內已有法規,特殊場景“切入”不符合國內交通場景特點,尤其是切入時刻及軌跡對自動駕駛開發及測試影響較大,如果沒有客觀準確數據支撐,后果不堪設想。
Kim等人分析了高速公路12種切入場景拓撲圖及每種場景下本車可能的運動方向利用駕駛模擬器分析了駕駛人在各場景下的駕駛行為并提出了一種Range-Range Plot方法分析其駕駛特性[1]。朱西產等人研究了安全切入場景下,五種典型的制動工況[2]。Liao等人利用駕駛模擬器統計分析了低速車輛切入場景下本車駕駛人行為并指出切入場景比跟車場景更為復雜[3]。Feng等分析了下前車切入場景下的危險工況對駕駛人初始制動時刻的分布及影響因素進行了分析[4]。還有許多有關切入行為的文獻研究,這里不再一一引用,就國內外的研究進展來看,盡管各位專家學者從不同的角度、建不同的模型、用不同的理論,但顯然迄今為止,仍未有統一的、系統性的方法論,納入的因素不夠多、適用范圍不夠廣、實證檢驗不夠充分等諸多缺陷需要投入更多的精力物力人力來克服。因此,無論是對于學術界而言還是之于產業界來說,形成一套公認的、準確的測試車輛切入場景軌跡分析與應用體系,此任務迫在眉睫。
針對“切入場景軌跡研究與分析方法”缺失的問題,本文提出了一套較為系統的研究體系。同現有研究方法相比,有以下創新點:①本文是基于自然駕駛采集的數據對切入場景進行研究,將真實世界的交通環境參數作為研究對象,大大增加了研究結果的可靠性和真實性;②本文將切入場景類型進行較為細致的劃分,從不同的角度、對不同的參數進行統計分析,為后續的軌跡模型建立做好理論基礎工作;③本文將切入行為分為向左切入和向右切入,分別對高速公路和城市快速路、不同切入持續時間下的切入軌跡進行擬合。
1 切入場景軌跡模型的建立與分析

圖1
1.1 實車道路采集
為了保證數據來源的廣泛性,從而使得研究結果更具普適性,需要從多個地方采集海量的場景數據,具體方案是采集的中國東北、華北、西北、華中、華東、華南、西南等10余個重點城市的高速公路和城市快速路的場景數據;分別搭建兩種駕駛場景數據采集平臺:基于圖像視覺的采集平臺和基于多傳感器的采集平臺。前者環境感知模塊以圖像視覺設備為主,能夠實時對車輛前方的行人、騎行者、轎車、貨車以及車道線等目標進行識別和追蹤;后者環境感知模塊硬件包括激光雷達、毫米波雷達、雙目攝像機、單目視覺模塊,定位模塊采用GPS+姿態組合慣性導航系統,在場景精確感知、定位等方面精度更高,采集駕駛場景的內容更豐富。最后分析1000余條場景片段數據,從而得到切入場景軌跡、車速、切入時刻等數據。其中,駕駛員年齡均勻分布于25-55周歲之間,駕齡在5至16年;采集時間為早6點至晚7點,共計34天;高速公路采集里程占比為68%;覆蓋了晴天、多云、下雨等多種天氣條件。
1.2 模型指標體系構建
1.2.1 數據預處理
在建立多項式模型之前,我們需要首先對數據質量進行較為嚴格的檢查和處理。數據清洗是整個數據處理過程中至關重要的第一步,影響之后分析結果的質量,主要是對攝像頭、毫米波雷達、激光雷達、高精度慣導組合四大類車載傳感器采集的原始數據,進行數據清洗和去噪。接下來是缺失值處理,對于存在缺失值的變量,如果缺失值太多則直接舍棄該變量,因為如果進行數據填補可能會適得其反,引入噪音;對于缺失值個數適中的變量,則考慮將缺失值納入或單獨設為一種類別;對于缺失值較少的變量,如果是連續性變量可以采用拉格朗日插值法或隨機森林進行填充,如果是離散型變量,則考慮用眾數、中位數替換。最后再根據交通標準法規、正常參數數據范圍并結合單變量離群值檢測法進行異常值處理①異常值是指明顯偏離大多數抽樣數據的數值。。
1.2.2 關鍵參數分析
對于場景的提取主要采用人工和半自動化的方法進行,自動化場景數據提取技術是通過機器視覺技術和深度學習技術,從視頻圖像出識別出行人、車輛等交通目標,并估計目標的距離和速度。然后比對從視頻圖像中提取出來的目標信息和其他傳感器(如激光雷達和高精度地圖)信息,得到動態和靜態元素的位置,速度和運動軌跡等信息,在通過實現設定好的判斷規則,將駕駛場景數據轉化為一連串的駕駛場景描述,并最終自動轉化成OpenScenario格式進行存儲。同時,我們也采用人工標注方法作為輔助和補充,通過比對不同傳感器返回的信號值,同時對比視頻數據,手動標出目標,找出目標的速度,然后總結成場景數據,編寫OpenScenario文件。
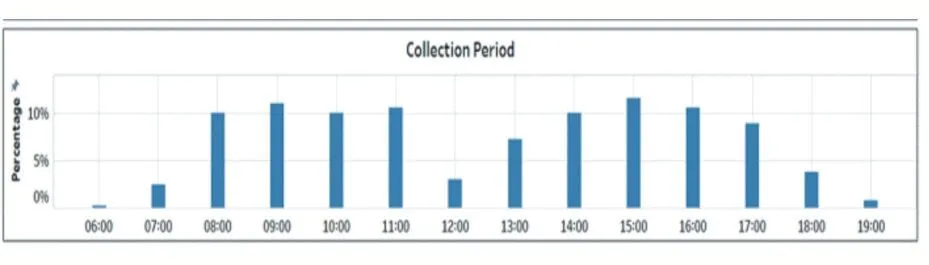
圖2 數據采集時間
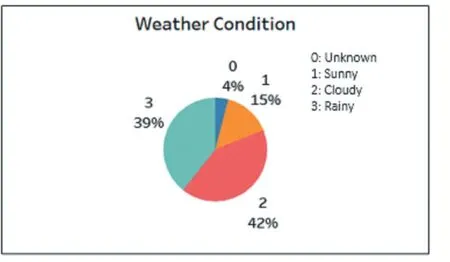
圖3 不同天氣條件占比
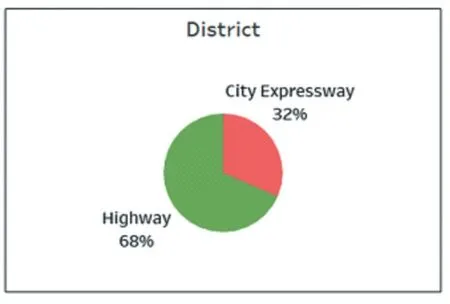
圖4 高速公路與城市道路數據采集占比
(1)切入場景統計分析
在所有采集場景中,本車切入場景占比為31%;本車切入場景又分為多個子場景,即根據本車道與目標車道周圍車輛位置及運動狀況的不同來進行類別劃分(見圖6),各子場景占比見圖7。
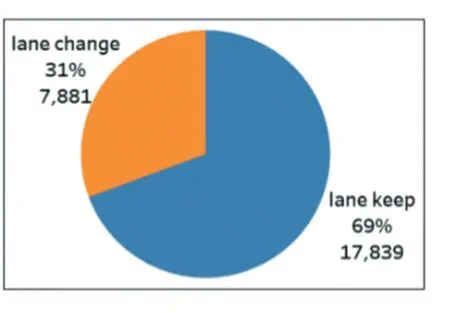
圖5 本車切入場景占比

圖6 本車切入子場景類型(切入場景不含15-17、19、20、24、27、41-43、45、46、50、51、53、57)

圖7 本車切入子場景占比情況
(2)關鍵變量統計分析
在本車切入場景下,切入持續時長、本車平均車速、本車平均加速度、與前車的縱向距離、與前車的TTC和THW都是非常關鍵的參數,是場地測試過程前、過程中、過程后需要仔細設計、測試、評估的變量與條件。
由圖8、圖9可以看出本車切入其他車道場景下,本車車速80-90km/h的發生頻率最高,本車與目標車最小縱向距離集中于0-5m。
對于參數TTC而言,70%的場景沒有碰撞風險②當TTC≤2s時存在碰撞風險,本車與目標車的初始縱向距離越小、本車車速越大,發生碰撞事故的可能性越大,TTC集中分布于0-7s,不同目標車位置(前后左右)的TTC分布之間的差距很小。
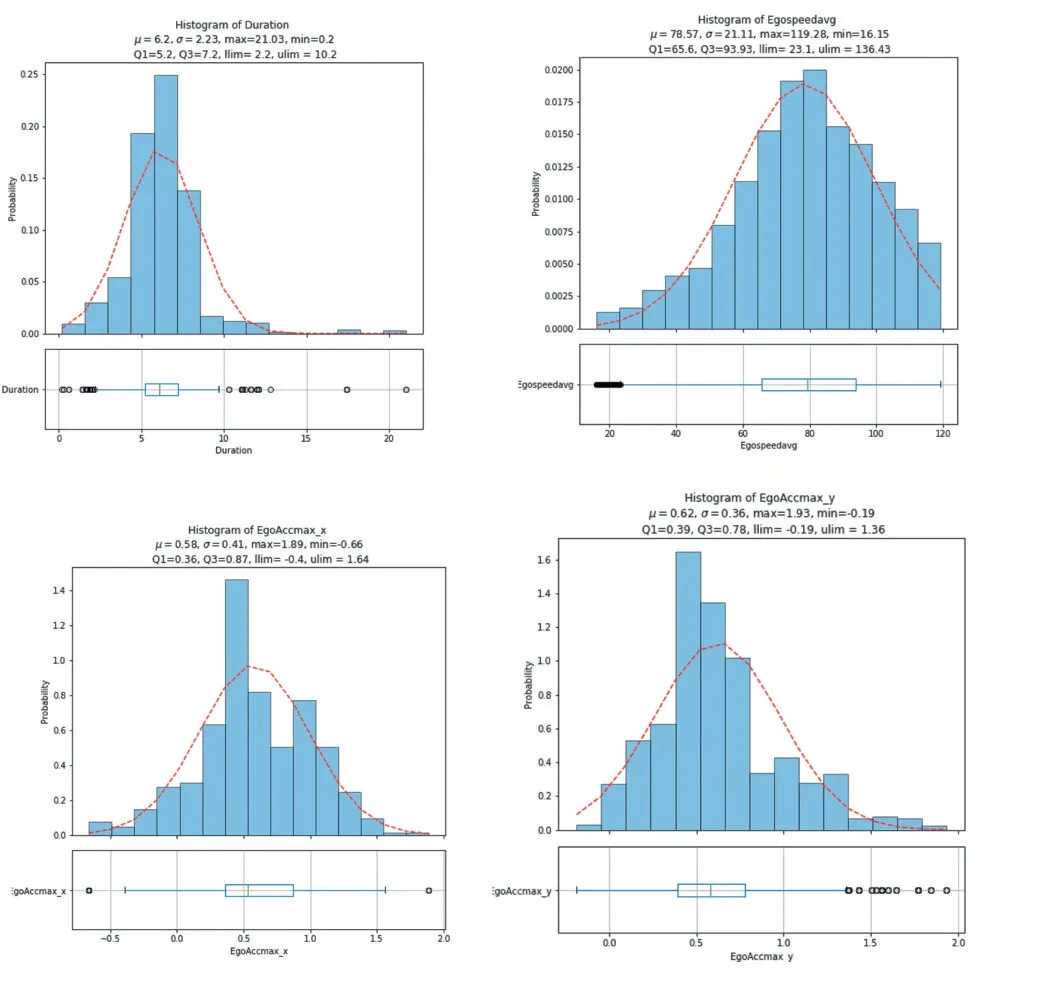
圖8 本車參數分布情況(依次為:切入持續時長、本車速度、本車橫向加速度、本車縱向加速度)
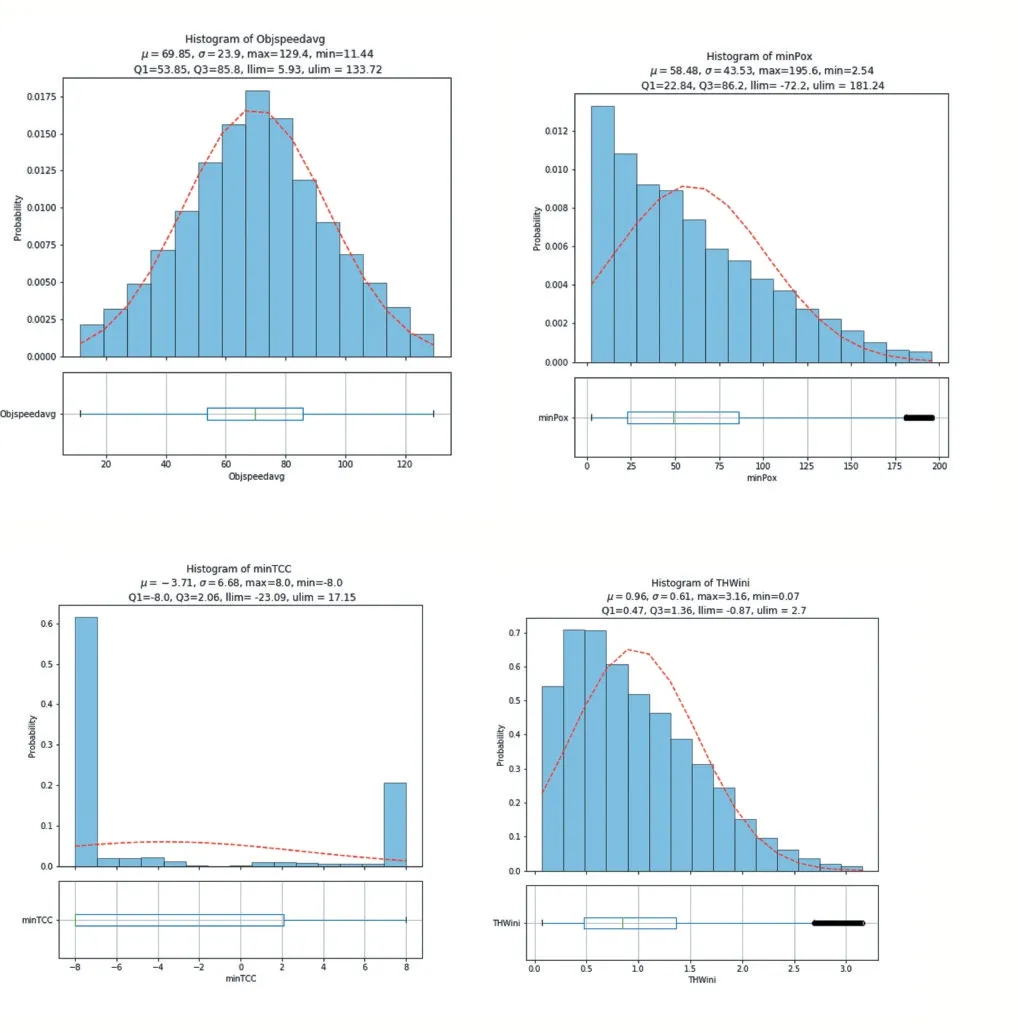
圖9 目標車參數分布情況(依次為:目標車速度、本車與目標車最小縱向距離、最小TTC、最小THW)

圖10 不同位置目標車TTC分布情況
THW集中分布于0.4-1.5s,不同道路類型(高速公路/城市快速路)對THW分布的影響幾乎不存在,然而不同目標車位置(前后左右)的THW分布之間的差距很大。
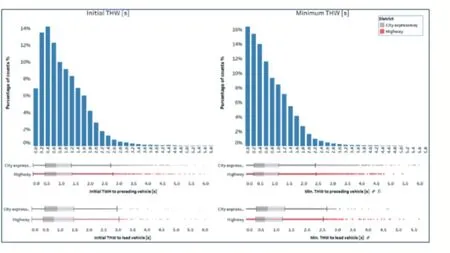
圖11 不同道路類型THW分布情況
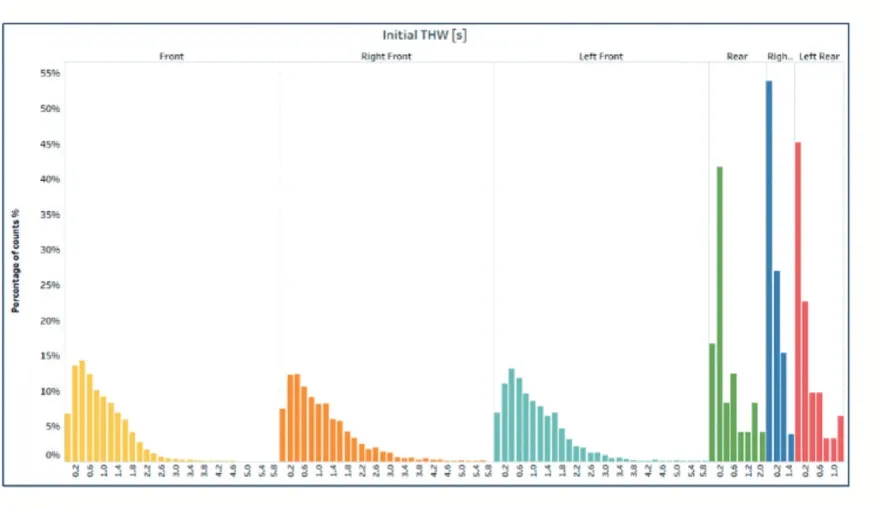
圖12 不同位置目標車THW分布情況
一般情況下,當駕駛行為的持續時間為6-7s,與目標車初始距離為120-140m時,本車可成功完成切入行為。
最后,切入場景中,與目標車道前車的初始縱向距離多為2.6-4m,與目標車道后車的初始縱向距離則集中于3-4m。
對不同道路類型或路段下的切入持續時長參數進行分析,發現快速路、高速主路與匝道間的匯入區、高速主路與匝道間的匯出區、高速主路、高速匝道的眾數分別為6.5s、6.03s、5.9s、6.5s、6.75s。
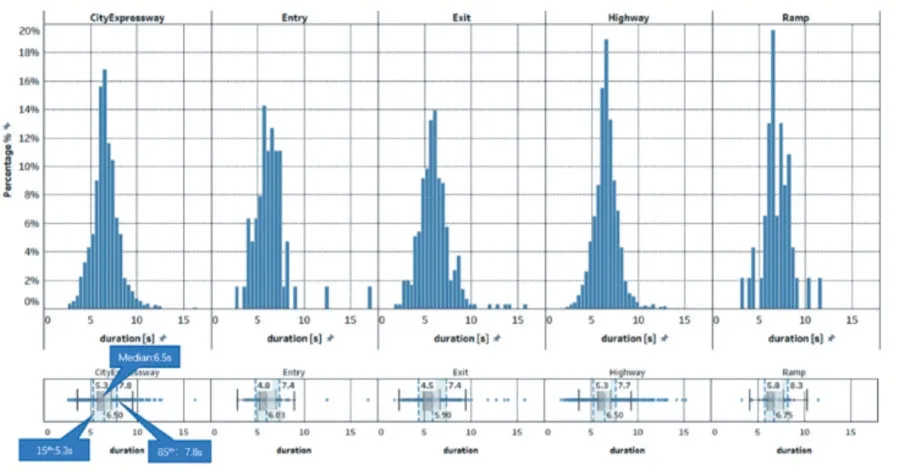
圖13 不同道路類型或路段的持續時間分布情況
另外,在此研究中,我們發現,在交通擁堵的情況下,本車切入場景所占比例相對較高,大約在12%,這很容易產生交通安全隱患。
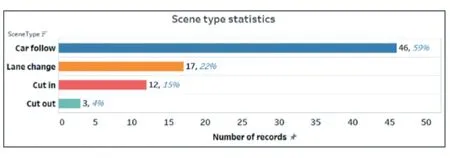
圖14 交通擁堵條件下切入場景占比情況
1.3 軌跡模型建立與分析
1.3.1 軌跡模型選取
在研究切入軌跡規劃時,經常使用的方法包括拓撲法[5]和柵格法[6],另外也有一些經過優化得到的模型,比如滾動窗口法和彈性帶理論[7]。而多項式模型作為認可度較為廣的模型,研究得也比較深入,王海等四位學者同時采用余弦函數和5次多項式的模型[8],對換道軌跡進行研究和仿真試驗,擬合效果較為顯著。本文選擇四次多項式函數建立中國典型結構化道路的切入場景模型,以支撐自動駕駛系統開發及測試。
1.3.2 軌跡擬合結果與分析
(1)首先建立本車切入過程中的縱向偏移量off-set_x與橫向偏移量offset_y之間的關系函數,分別得到本車向左切入和向右切入的兩種軌跡模型如圖15。
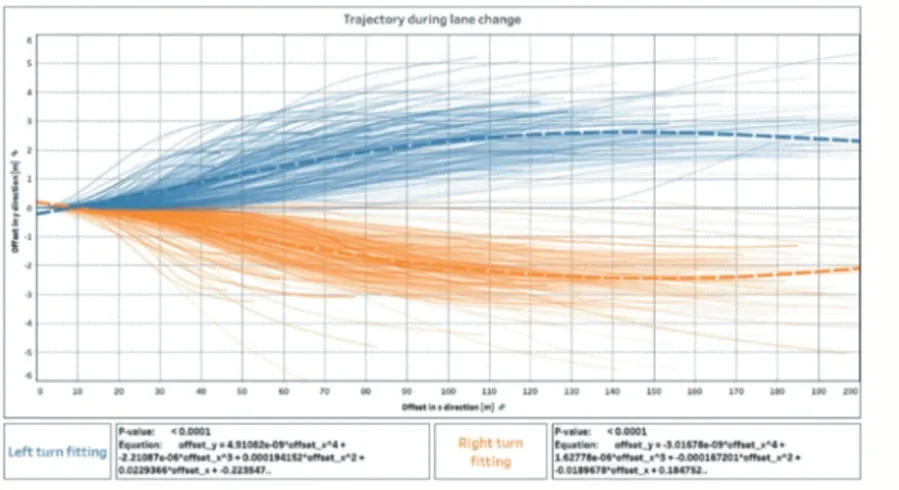
圖15 本車切入軌跡模型(x-y)
對切入軌跡進行分析,發現切入行為所經縱向偏移量越小,所需方向盤轉角越大,而對比城市快速路,高速公路的縱向偏移量要長出40m(見圖16)。
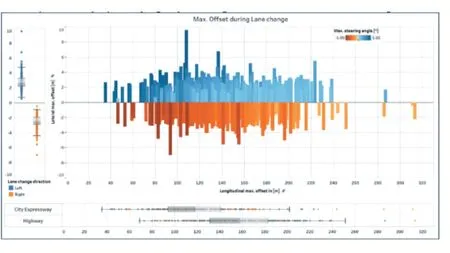
圖16 本車方向盤轉角與縱向偏移量關系(城市快速路與高速公路對比)圖
而對比向左切入和向右切入,發現向左切入行為更為激進。
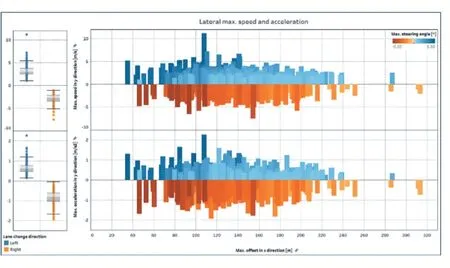
圖17 本車方向盤轉角與縱向偏移量關系(向左切入與向右切入對比)圖
(2)其次建立本車切入過程中的切入過程時點Time與橫向偏移量offset_y之間的關系函數,分別得到本車切入行為得不同持續時長(Duration)軌跡模型。
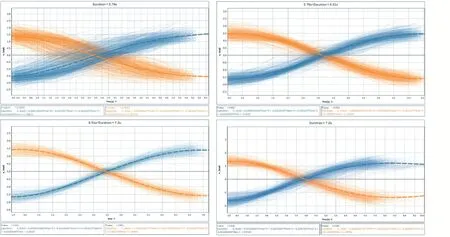
圖18 不同持續時長下本車切入行為軌跡圖
2 結語
本文針對中國典型切入場景特征進行了深入研究。首先對關鍵的參數進行分析得出切入場景的持續時長、本車平均車速、本車平均加速度、與前車的縱向距離、與前車的TTC和THW的分布情況、眾數和集中度;之后又基于四次多項式函數模型對不同縱向偏移量、不同持續時間下的切入軌跡進行擬合,這些研究結果對自動駕駛橫縱向控制類系統的測試工況設計具有重要的參考價值,可制定更加合理、準確的測試通過條件。今后還要對不同道路類型和不同車速下的切入場景軌跡進行研究分析,以便更加精確化、精細化地進行切入工況測試場景設計。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
