多波束測深系統在沉管隧道基槽回淤監測及邊坡穩定性分析中的應用
2021-05-29 06:19:14陶振杰朱永帥成益品鎖旭宏
中國港灣建設 2021年5期
陶振杰,朱永帥,成益品,鎖旭宏
(中交一航局第二工程有限公司,山東 青島 266071)
0 引言
深圳至中山跨江通道工程(以下簡稱“深中通道工程”)采用東隧西橋方案,項目路線起于深圳機場南,于中山馬鞍島橫門互通。受長期采砂活動影響,深中通道工程西人工島至礬石水道區域原始地貌已被改變,形成了一個巨型的采砂坑,該采砂坑水深普遍在-10 m以下(1985國家高程基準,下文高程基準均采用85高程),砂坑底部存在較厚流動性回淤物,其物理力學性能指標差,對基槽成槽可能造成嚴重影響。為此使用高質量的多波束測深系統對隧道基槽區域進行數據采集,同時使用多種分析方法對該項目隧道基槽數據進行合理分析,為今后的設計和施工提供合理參考數據。
1 多波束測深系統組成
多波束測深系統是由多傳感器組成[1-3]。本工程所使用的多波束測深系統為挪威kongsberg公司生產的EM2040測深系統,基本的EM2040由4部分組成:甲板處理單元、發射換能器、接收換能器和工作站,還包括姿態傳感器、定位系統和聲速剖面儀,可以選擇輸入換能器表面的聲速數據。具體組成如下:Kongsberg EM2040 1°×1°單條帶多波束測深儀、POSMV Oceanmaster慣導系統、AML BASE X2聲速剖面儀、AML Micro-X表面聲速儀、UPS不間斷電源及采集電腦、數據采集qinsy和控制軟件SIS及數據后處理軟件Qimera、Trimble R9S一套。
2 多波束測深系統質量
EM2040多波束測深儀是全球第一套把深水多波束優點應用到淺水多波束的系統,最大ping率為50 Hz,滿足IHO-S44 special測量標準。
EM2040多波束測深儀的主要特征如下:每個ping雙條帶,加倍了測量速度、FM chirp技術測深范圍更大、波束具備roll、pitch、yaw穩定、發射和接收都具備近場聚焦功能、EM2040的工作頻率為200~400 kHz,有3種標準的工作模式。通常是300 kHz模式,優化并兼顧了測深能力和分辨率。在這種模式下,使用的帶寬超過75 kHz。每個發射扇面被分成3個扇區,發射頻率各不相同,在雙條帶模式下,頻率可達6個。最小脈沖長度大約35μs。斜距分辨率為3 cm,再加上運用成熟的Kongsberg海底檢測算法,深度分辨率可達厘米級。
2.1 多波束測深系統校準及校正比對
2.1.1 系統的校準
系統的校準(或稱標定)是多波束測量作業的最關鍵環節,它直接影響最終的測量成果。因此系統的校準必須嚴格按廠方技術人員的要求進行。其中包括:各傳感器之間的相對位置關系標定;姿態校正,包括定位時延、roll(橫搖)、pitch(縱搖)、heading(艏向)4種姿態的校準。
1)各傳感器之間的相對位置關系標定
一般情況下,以水面為零點,使用全站儀測量出各傳感器之間的相對位置坐標,標定參數主要有:TX(發射換能器)中心距零點的相對位置、RX(接收換能器)中心距零點的相對位置、IMU(慣導系統)中心距零點的位置、定位天線相位中心距零點的相對位置。
根據JT/T 790—2010《多波束測深系統測量技術要求》[4]中6.2.6章節規定:系統各配套設備的傳感器位置與測量船坐標系原點的偏移量應精確測量:讀數至1 cm,往返各測1次,水平方向往返測量互差應小于5 cm,豎直方向往返測量互差應小于2 cm,在限差范圍內取其平均值作為測量結果。
2)姿態校正
由于本工程主要測深區域位于淺水區域且使用RTK定位無驗潮模式,因此這里主要對橫搖、縱搖、艏向3種姿態進行校準。
橫搖:在平坦區域,同一測線,做同速反向測量。
縱搖:斜坡或突出的目標上,同一測線,做同速反向測量。
艏向:斜坡或突出的目標上,2條平行測線,做同速同向測量,測線之間有1/3~1/2個條帶的覆蓋。
根據《多波束測深系統測量技術要求》[4]中6.2章節規定:橫搖應取3組或以上數據計算校準值,中誤差應小于0.05°,縱搖應取3組或以上數據計算校準值,中誤差應小于0.3°,艏向應取3組或以上數據計算校準值,中誤差應小于0.1°。
2.1.2 系統校正比對
根據《多波束測深系統測量技術要求》[4]中規定在系統校準后多波束測深系統在測深作業前需進行綜合測深誤差的測定,其中綜合測深誤差的測定大體分為內符合測試和外符合測試兩種。
1)內符合
內符合通俗來講就是多波束測深系統的一個自檢符合,通過這個檢核可以測試出系統自身在各傳感器之間的相對位置關系標定、姿態校正、七參數鍵入等方面是否存在問題。具體操作方法為:選擇一塊水深大于施工測區內最大水深的平坦水域,同一區域按正交方向測量2次,比對2次測量重疊部分水深數據,不符合極限誤差的數據不能超過參與比對總數據的15%。水深≤30 m的水域,精度應滿足表1中特等測量要求,水深>30 m的水域,精度應滿足表1中一等至三等測量要求。
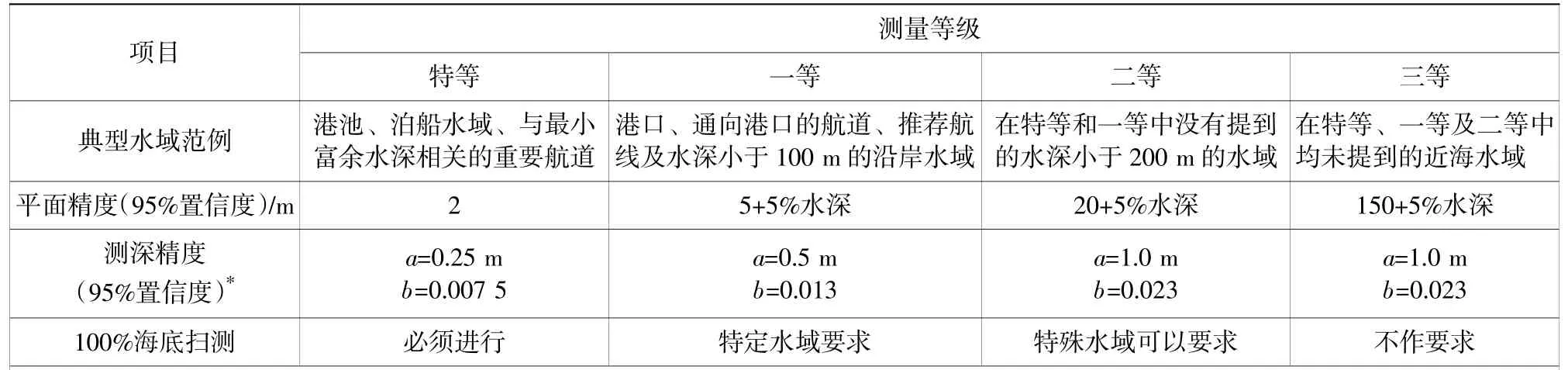
表1 多波束測深精度要求Table 1 Multi-beam sounding accuracy requirements
EM2040多波束測深系統通過內符合自檢數據精度,測試地點選擇在伶仃至隧址段航道中段東側區域,跑正交線進行內符合測試,查看數據銜接情況,刪除假水數據,使用Hypack軟件把2次按正交方向掃測的數據進行tin建模,差值生成色塊圖進行統計分析,結果見表2。
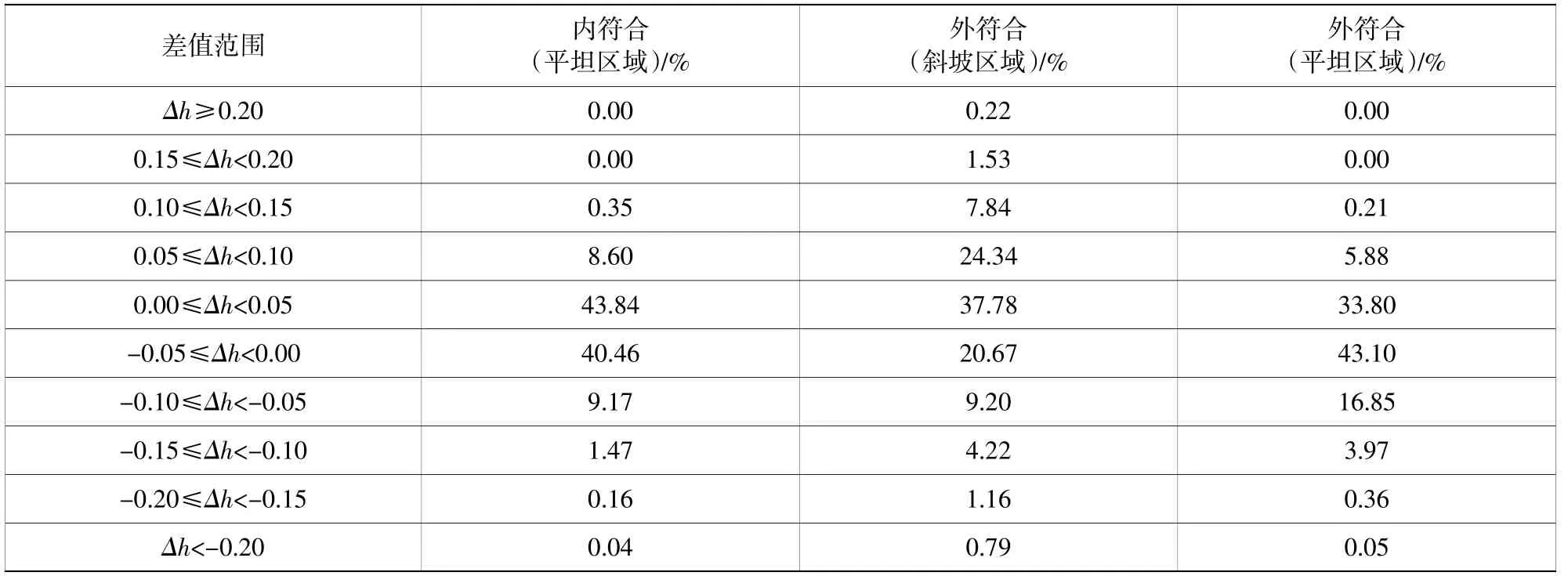
表2 差值分析表Table 2 Difference analysis table
2)外符合
外符合是多波束測深系統的一個外部檢核,通過這個檢核可以測試出系統的相對誤差。具體操作方法為:選擇一塊水深大于施工測區內最大水深的平坦水域,采用單波束測深儀(測深精度已校準且優于規定精度)對系統進行水深精度比對,比對不符合極限誤差的數據不能超過參與比對總數據的15%。
EM2040測深系統由于現場未找到符合規范要求的單波束測深儀,但現場有另一臺經過校正比對且測深精度優于規定精度的EM2040測深系統,具體操作如下:使用2套多波束測深系統對同一平坦區域和同一斜坡區域進行水深測量,其中檢測多波束系統在后處理中取其中央波束同被檢測多波束系統掃測數據進行比對,使用Hypack2011軟件把2次掃測的數據進行tin建模,并將差值生成色塊圖進行統計分析,結果見表2。
2.2 多波束測深系統影響數據采集質量的主要因素
多波束測深系統影響數據采集質量的因素有很多,從儀器的安裝到系統的校準,再到數據采集,最后的數據處理。
實際操作中,需要注意的最主要的因素還是儀器的安裝,尤其本工程多波束測深系統屬于船底式安裝方式,每一次安裝和拆卸都需要上塢進行作業,費時費力費錢。而其他的因素:系統的校對、數據采集、數據處理等過程進行系統誤差改正相對簡單。系統安裝的好壞直接影響后續工作的進行,如:安裝位置最好在船體的1/3處,因為此處的噪音和產生的氣泡對儀器的影響最少;系統各設備之間的相對位置關系標定應準確測量,其標定精度直接影響多波束測深精度,因為后續的軟件參數鍵入均以其標定數據為依據。
3 基槽回淤監測方法
3.1 回淤量計算法
將處理好的多波束掃測數據生成.xyz格式,導入到Cass中生成相應的水深圖,使用Cass或者FastTFT軟件分別計算出基槽各區域每期測量剩余工程量。前后二次數據比較可得此間基槽槽內沉積物淤積厚度,通過長期監測,可以得到各個時間段沉積物回淤厚度及回淤強度。
3.2 色塊圖比對法
色塊圖比對法相對于回淤量計算法來說,可以直觀地分析出不同區域部位的回淤厚度,進行專項的分析處理。首先將前后2次的測量數據生成.xyz,導入到國際通用的海洋Hypack軟件進行tin建模,對tin最大邊長及生成的tin×tin的邊長進行編輯,將兩期數據相同的部位進行差值計算;為了更直觀、方便地分析判斷,同時對不同的差值范圍進行顏色定義,最終輸出DXF格式的差值色塊圖。
4 基槽邊坡穩定性分析
4.1 斷面圖分析法
多波束測量屬于全覆蓋海量數據測量,建立DTM模型比較符合實際地形[5-9],前后斷面可比性較好。利用多次多波束跟蹤測量的數據,對各期的數據斷面線進行比較,以分析與判斷邊坡的穩定性。
采用國際通用的海洋測量Hypack軟件進行數據處理分析,將各期掃測數據進行tin建模,做出監測區域每期數據斷面,將斷面疊加比較分析,可以有效地判斷分析出邊坡的變化情況。
其中2020年7月3日為首期驗收的邊坡數據,2020年8月19日為監測數據,通過疊加橫切斷面圖可以判斷出邊坡的穩定性,邊坡上總體穩定,均未出現明顯滑坡、變形現象,斷面呈臺階狀仍然明顯。
4.2 三維圖比對法
多波束測量屬于全覆蓋海量數據測量,利用Qimera軟件將采集的.db原始數據文件生成海底地形三維圖,通過不同時間段生成的三維圖像進行對比,可掌握基槽開挖后整體隨時間變化情況,可以大體判斷出邊坡的變化情況。
5 結語
多波束測深系統在沉管安裝基槽回淤監測及邊坡穩定性分析中的應用對沉管沉放安全對接起著至關重要的作用。在實際應用中,港珠澳大橋島隧工程沉管隧道E15安裝期間,EM2040多波束測深系統通過三維圖對比法及時發現基槽邊坡滑坡、槽底出現大面積回淤等狀況,回淤量計算法、色塊圖對比法等分析方法為安裝決策提供重要的數據支持,對保障港珠澳大橋深水沉管隧道精確對接發揮了關鍵作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45