基于無人機影像陰影去除的蘋果樹冠層氮素含量遙感反演
2021-05-31 07:44:46李美炫朱西存白雪源彭玉鳳田中宇姜遠茂
中國農業科學 2021年10期
關鍵詞:模型
李美炫,朱西存,2?,白雪源,彭玉鳳,田中宇,姜遠茂
1山東農業大學資源與環境學院,山東泰安 271018;2國家土肥資源高效利用重點實驗室,山東泰安 271018;3山東農業大學園藝科學與工程學院,山東泰安 271018
0 引言
【研究意義】氮素養分狀況是評價果樹長勢的重要指標[1-2],傳統的果樹氮素含量測量方法費時、費力且不能滿足大面積、快速、實時監測的需要[3];而無人機低空遙感與傳統的氮素測量方法相比機動靈活,可以迅速捕獲高空間和時間分辨率的影像,快速進行果樹冠層氮素含量反演,已經在精準農業領域得到了廣泛應用[4-6]。由于果樹冠層具有三維結構,當無人機傳感器觀測方向與太陽直射方向不一致時,無人機影像中通常包含陰影[7-9]。這些陰影削弱了冠層光譜信息,降低了冠層氮素含量反演精度。因此,如何去除果樹冠層遙感影像中的陰影,以提高氮素含量反演精度,是一個亟需解決的現實問題。【前人研究進展】陰影去除的方法一般是對原始影像進行歸一化、多波段陰影監測等處理,這些方法操作簡單快速,但精度較低,且在對陰影進行識別的過程中改變了非陰影區的信息,降低了原影像的精度[10-12]。近年來,一些模型和算法應用于陰影的識別和去除中,這些方法一般基于先驗知識對陰影進行識別或模擬,實現陰影與非陰影區的分離以達到陰影去除的目的。如PU等[13]開發了逐步掩蔽系統,用于分離樹冠的光照和陰影部分,以提高森林物種圖繪制精度;TITS等[14]采用信號分解模型,將果樹與陰影等背景信息分離;奚禎苑等[15]基于混合像元分解模型將Landsat 8 影像中植被、陰影及土壤有效分離,實現山核桃信息的有效提取;MILAS等[16]利用無人機影像的RGB反射比、可見大氣阻力指數(VARI)和數字表面模型(DSM)信息實現了陰影的監測、分類及移除;焦俊男等[17]在分析了不同光照條件下同一植被NDVI關系的基礎上,基于光照區植被的NDVI,構建了陰影去除模型并實現了Landsat 8影像陰影的有效去除。雖然這些方法一般精度較高,能夠將植被與陰影有效分離,但往往包含復雜的參數及高階函數,操作復雜且費時。目前,許多學者利用不同波段特性及波段運算方式,構建了植被指數以增強植被信息達到陰影識別的目的。ZHANG等[18]試驗發現不同光譜指數對陰影的識別情況不同;江洪等[19]構建了陰影消除植被指數(shadow eliminated vegetation index,SEVI),有效去除了地形陰影的影響,取得了良好的地形校正效果;柳曉農等[20]借鑒SEVI的構造原理及形式,構建了植被區分陰影消除植被指數(vegetation distinguished and shadow eliminated vegetation index,VDSEVI),研究結果表明相較于SEVI,VDSEVI的信息量更大,可以更好地消除地形陰影的影響。然而,該指數多適用于由地形產生的大面積陰影的識別和去除,并不適用于果樹冠層的陰影去除。許章華等[21-22]基于明暗區植被及水體三者在近紅外波段的光譜差異構建了陰影指數(shaded vegetation index,SVI),隨后在此基礎上進行了改進,提出了歸一化陰影指數(normalized shaded vegetation index,NSVI),成功將中等分辨率遙感影像中明亮區植被、陰影區植被及水體有效區分;XU等[23]通過分析不同光影比例下植被冠層紅邊參數(曲線斜率和反射率)與NDVI的相關性,構建了歸一化冠層陰影指數(normalized difference canopy shadow index,NDCSI),有效識別了無人機高光譜影像針葉林冠層內部的陰影。【本研究切入點】NSVI及NDCSI在陰影去除方面取得了較好的效果,但2個陰影指數能否實現無人機多光譜影像果樹冠層陰影的去除還需進一步探究。【擬解決的關鍵問題】本研究以山東省棲霞市蘋果園為研究區,以果樹冠層為研究對象,依據無人機多光譜影像數據,基于NSVI、NDCSI去除果樹冠層影像的陰影,提取果樹冠層光譜信息,分析陰影對多光譜各波段光譜信息及冠層氮素含量反演模型精度的影響,對比2種陰影指數在去除果樹冠層陰影及提高冠層氮素含量反演模型精度的效果,篩選最佳氮素含量反演模型。
1 材料與方法
1.1 試驗區概況
研究區位于膠東半島中心位置——山東省煙臺棲霞市觀里鎮蘋果園區(37°12′25″ N,120°44′41″ E),暖溫帶季風性氣候,四季分明,年日照時數2 631 h,秋季晝夜溫差大,年平均氣溫11.6℃,土壤為棕壤,丘陵地形(圖 1)。棲霞市憑借獨特的地理位置和良好的氣候土壤條件,已成為環渤海灣蘋果優勢主產區的典型代表。
1.2 數據獲取
1.2.1 多光譜數據的獲取及預處理 選擇晴朗無云無風天氣,于2019年6月2日10:00—14:00采集無人機多光譜遙感影像。在試驗區四周合適位置布設白色參考板便于進行輻射定標。無人機飛行高度設置為50 m,空間分辨率為2.2 cm,飛行速度為5 m·s-1。無人機攜帶的傳感器為具有4個多光譜波段和1個全色波段的Sequoia多光譜相機,傳感器波段參數如表1所示。
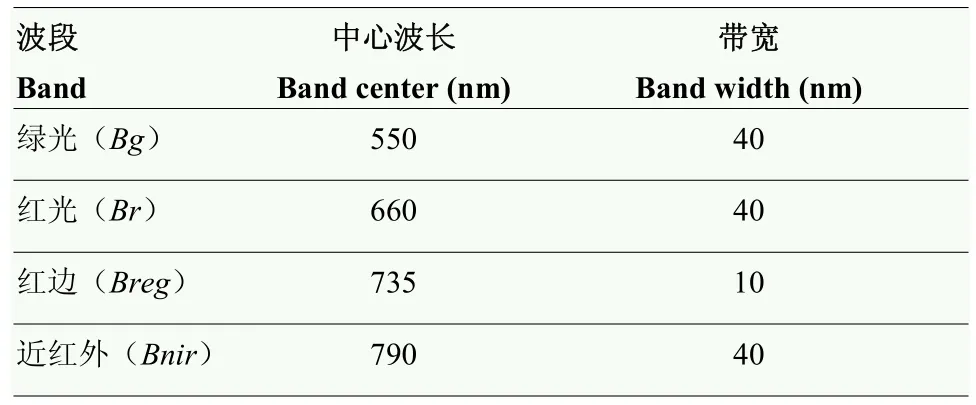
表1 多光譜傳感器的波段參數Table 1 Band parameters of multispectral sensor
選用PhotoScan對無人機多光譜影像進行拼接。為消除幾何畸變和輻射失真等因素對影像質量的干擾,對拼接后的多光譜影像進行幾何校正和輻射校正的預處理。幾何校正主要在ENVI中實現,以無人機正射影像為參考影像,在影像中均勻選取30個參考點進行幾何精校正,保證校正后誤差小于0.5個像元。采用偽標準地物輻射糾正法[24],將多光譜影像DN值轉化為反射率,如公式1所示。
式中,RT為目標地物的反射率,DNT為目標地物的DN均值,DNX為白色參考板的DN均值,RX為參考板的反射率值。
1.2.2 蘋果樹葉片氮素含量的測定 與無人機飛行同步進行蘋果樹葉片采集。按照均勻布點的原則,在果園中隨機選擇 51棵果樹,在每棵果樹中部營養枝東、南、西、北4個方位,分別摘取3片大小相似、無損的葉片作為1個樣本,每個樣本包含12個葉片,共計51個樣本。采樣后,迅速將樣本轉入保鮮箱帶回。
在實驗室稱取葉片鮮重,將葉片樣本放入105℃鼓風干燥箱中殺青0.5 h后,在80℃下烘干至恒重。把烘干的樣品用研缽研磨成粉末狀后過篩,采用凱氏定氮法測定葉片氮素含量。
1.3 陰影指數
NDVI是目前應用最廣泛的植被指數之一,但由于NDVI易飽和,對陰影的識別并不敏感,因此許多學者基于NDVI構建新型植被指數以達到去除陰影的目的[25-26]。在NDVI的基礎上,許章華[22]及XU等[23]分別提出NDCSI、NSVI2個陰影指數,計算公式如下:
式中,NDVI為歸一化植被指數,RNIR為近紅外波段灰度值,RRED為紅邊波段灰度值;SVI為陰影植被指數,RNIR為近紅外波段灰度值;NSVI為歸一化陰影指數,SVIMIN為影像波段運算后SVI最小值,SVIMAX為影像波段運算后SVI最大值;NDCSI為歸一化冠層陰影指數,(Rred-edge)MIN為影像紅邊波段最小值,(Rred-edge)MAX為影像紅邊波段最大值。
本研究采用閾值法去除果樹冠層陰影,提取冠層光譜信息。為去除果樹冠層的陰影,首先在ENVI中利用波段運算工具計算陰影指數;隨后確定合適的閾值,大于閾值的像素為植被,小于閾值的像素歸為陰影等非植被;最后基于閾值建立掩膜得到去除陰影后果樹冠層多光譜影像。其中,閾值的確定是去除陰影的關鍵,據植被指數的閾值范圍,以0.05為累進值依次提取果樹冠層的影像,對比該閾值情況下陰影的識別情況將最大值設為閾值。
1.4 模型的建立與檢驗
采用等距抽樣的方法確定建模集及驗證集。將51個研究樣本按照氮素含量由小到大排序分組,根據建模集與驗證集為 2∶1的比例進行等距抽樣,建模集34個,驗證集17個。
本研究采用偏最小二乘和支持向量機2種方式構建葉片氮素含量反演模型,對比分析陰影對不同反演模型精度的影響。偏最小二乘法可以通過最小化誤差的平方和找到一組數據的最佳函數匹配,可在一定程度上有效地消除參量之間的多重共線性,是目前應用最廣泛的模型之一[27-28];支持向量機是基于小樣本統計理論,建立在統計學習、VC維理論以及結構風險最小化的原理上的一種新型機器學習方法,已經在農業定量遙感領域得到了廣泛應用[29-30]。
選取決定系數(R2)、相對分析誤差(RPD)作為反演模型評價與驗證的指標。反演模型及驗證時R2越大,表明模型的估測能力越好;當RPD<1.4時,模型無法對樣本進行預測;當1.4<RPD<2時,模型可以有效地對樣本進行預測;當RPD>2時,模型有極好的樣本預測能力[31]。計算公式如下:
2 結果
2.1 基于陰影指數去除果樹冠層陰影
依據灰度值的差異可以反映各陰影指數對陰影的識別情況,初步判斷陰影指數在去除冠層陰影效果中的優劣。如圖 2所示,NDVI僅能以冠層輪廓為界區分果樹冠層與土壤背景,并不能識別冠層內部的陰影;陰影植被指數NSVI和NDCSI對陰影均有一定的識別能力,不僅能夠區分果樹冠層和土壤背景信息,也能夠識別冠層內部絕大部分陰影,但與NSVI相比,NDCSI對陰影更加敏感,識別能力更強。
果樹冠層、土壤背景與陰影的灰度值大小關系為果樹冠層>陰影>土壤背景,陰影與果樹冠層的灰度值存在較大差異,因此,設定合適的閾值可以將冠層內部的陰影有效區分(圖 2)。不同閾值下冠層內部陰影的識別情況如圖3所示,當NSVI閾值為0.6時,冠層內部仍有部分陰影沒有被識別;當閾值為0.7時,冠層被分割得過于破碎;閾值為0.65時,可以識別冠層內部絕大部分陰影且冠層整體形狀保持較完整,因此將0.65設定為NSVI的閾值。同理,NDCSI的閾值最終確定為0.4。如圖4所示,以0.65為NSVI閾值,以0.4為NDCSI閾值,最終得到去除陰影后果樹冠層多光譜影像。
2.2 去除陰影前后冠層光譜特征分析
基于三幅多光譜影像分別提取 51個樣點的冠層光譜信息,將其各波段的平均值繪成光譜曲線進行比較分析(圖5)。基于三副影像提取的光譜反射率均值折線圖走勢趨于一致,但去除陰影前后冠層光譜信息差異較大且在紅邊波段及近紅外波段尤為明顯。同時結果顯示基于2個陰影指數去除陰影后提取的光譜信息略有不同,基于NDCSI去除陰影后提取的光譜信息與原始光譜信息差異較顯著。
2.3 去除陰影前后光譜數據與氮素含量相關性分析
2.3.1 敏感波段分析 基于相關系數法,篩選與氮素含量相關性較高的波段為敏感波段,結果顯示去除陰影前后葉片氮素含量的敏感波段均為綠光波段和紅光波段(表 2)。此外,基于陰影指數去除陰影后,冠層葉片氮素含量與多光譜4個波段的敏感程度均有提升,其中與綠光波段、近紅外波段的相關性提升顯著。基于NSVI去除陰影后綠光波段、近紅外波段與氮素含量實測值的相關性分別提升了0.08、0.13,基于NDCSI去除陰影后分別提升了0.12、0.20。
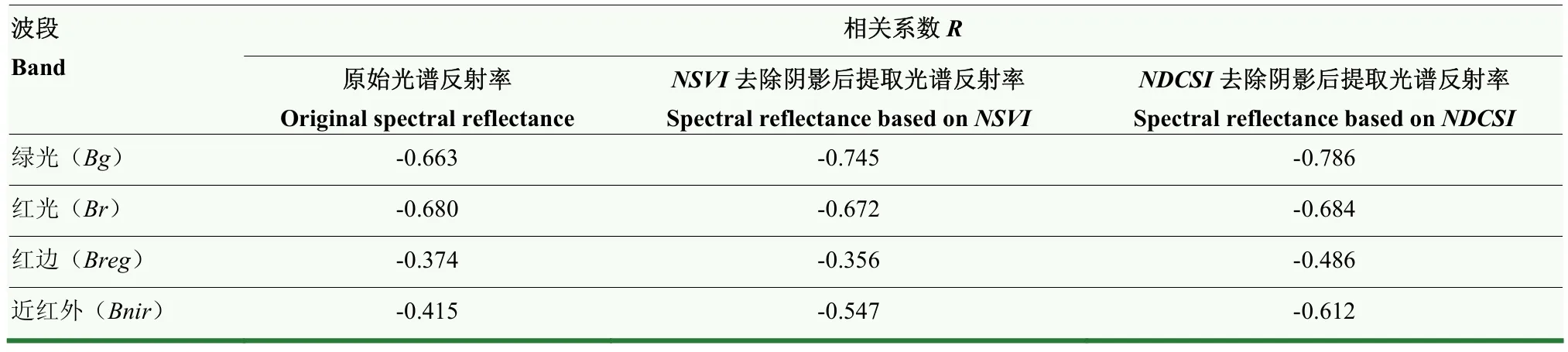
表2 敏感波段分析Table 2 Analysis of sensitive bands
2.3.2 去除陰影前后光譜參量與葉片氮素含量相關性分析 將篩選的敏感波段進行加減、平方根、倒數等多波段數學組合運算,構建了 10個光譜參量,與氮素含量的相關性分析結果如表3所示。去除陰影后,光譜參量與氮素含量的相關性均有所提升;基于乘積和加法運算構建的光譜參量與葉片氮素含量的相關性高于基于兩波段作比值和差值構建的光譜參量;同時,基于NDCSI去除陰影后構建的光譜參量與氮素含量的相關性高于基于NSVI去除陰影后構建的光譜參量。
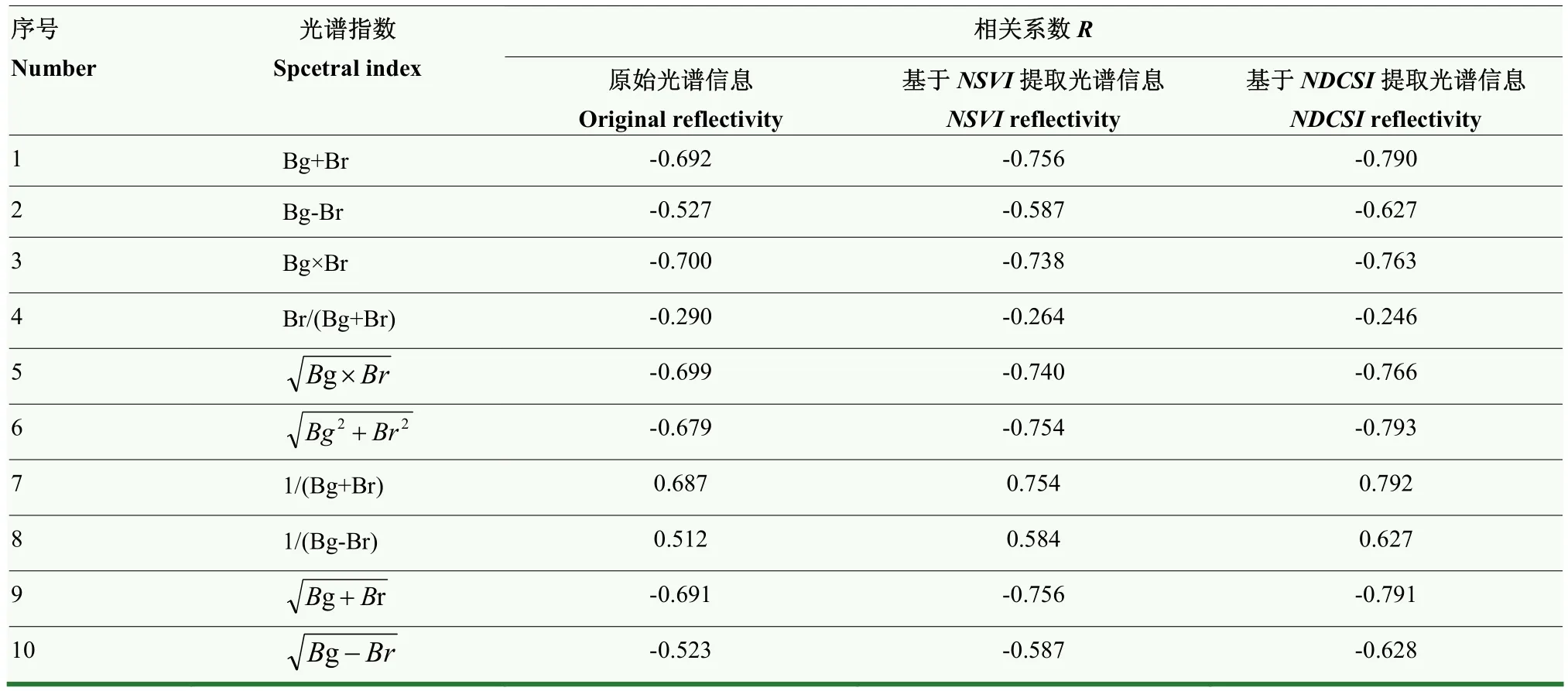
表3 光譜參量及其與氮素含量的相關性分析Table 3 Correlation analysis between spectral parameters and nitrogen content
分別篩選相關性較高的5個光譜參量構建葉片氮素含量反演模型,基于原始光譜反射率篩選的敏感光譜參量為基于NSVI和NDCSI去除陰影后影像提取的光譜反射率篩選的敏感光譜參量為。
2.4 果樹冠層氮素含量反演模型
以篩選的敏感光譜參量為自變量,冠層葉片氮素含量為因變量,構建偏最小二乘及支持向量機氮素含量反演模型,建模及驗證結果如表4—5所示。
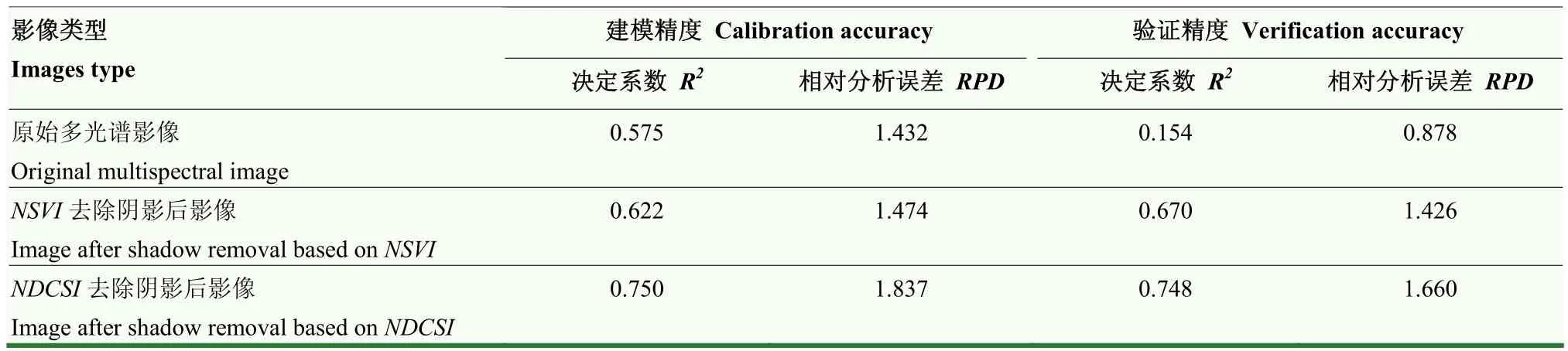
表4 基于三種影像PSL模型反演結果Table 4 Inversion results based on three image PSL models
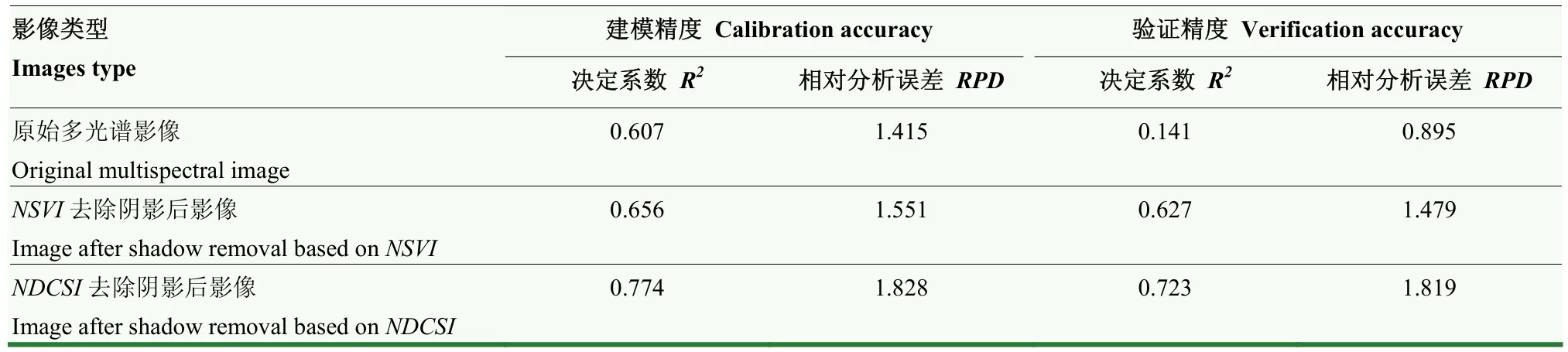
表5 基于三種影像SVM模型反演結果Table 5 Inversion results based on three image SVM models
與基于原始多光譜影像構建的反演模型相比,基于NSVI、NDCSI去除陰影后構建的偏最小二乘及支持向量機模型反演精度均有提升(表 4)。基于NSVI去除陰影后構建的偏最小二乘模型與去除陰影前相比,建模集R2提升了0.047,RPD提升了0.042;驗證集R2提升了0.516,RPD提升了0.548。基于NDCSI去除陰影后構建的偏最小二乘模型與去除陰影前相比,建模集R2、RPD分別提升了0.175、0.405;驗證集R2、RPD分別提升了0.594、0.782。
基于NSVI去除陰影后構建的支持向量機模型與去除陰影前相比,建模集R2提升了0.049,RPD提升了0.136;驗證集R2提升了0.486,RPD提升了0.584。基于NDCSI去除陰影后構建的支持向量機模型與去除陰影前相比,建模集R2、RPD分別提升了0.167、0.413;驗證集R2、RPD分別提升了0.582、0.924(表5)。
陰影降低了氮素含量反演精度,無論是線性模型還是機器學習模型,基于陰影指數去除陰影后構建的氮素含量反演模型精度更高。由于驗證集樣本數量較少及陰影等因素的影響,基于原始多光譜影像構建的模型驗證集R2均較低,但去除陰影后驗證集精度顯著提升,表明基于NSVI、NDCSI去除陰影后提取的光譜信息與冠層葉片氮素含量的相關性更高,建模效果更好。
對比2個陰影指數的建模結果,基于NDCSI去除陰影后構建的偏最小二乘模型反演精度與基于NSVI去除陰影后構建的模型相比,建模集R2提升了0.128、RPD提升了0.363,驗證集R2提升了0.078、RPD提升了0.234;基于NDCSI去除陰影后構建的支持向量機模型反演精度與基于NSVI去除陰影后構建的模型相比,建模集R2、RPD分別提升了0.118、0.277,驗證集R2、RPD分別提升了0.096、0.340。結果表明,NDCSI較NSVI去除陰影的效果更好,無論是線性模型還是機器學習模型,基于NDCSI去除陰影后構建的模型反演精度更高。
對比2種建模方法,基于NDCSI去除陰影后構建的支持向量機模型與偏最小二乘模型相比,建模集R2提升了0.024,驗證集RPD提升了0.159。綜上所述,如圖6所示,氮素含量反演的最優模型為基于NDCSI去除陰影后構建的支持向量機模型。
3 討論
無人機植被冠層多光譜影像中通常包含陰影,這些陰影削弱了植被的光譜信息,降低了冠層氮素含量反演精度[32-33]。本研究對比分析去除陰影前后冠層氮素含量反演模型,發現基于陰影指數可以有效去除果樹冠層陰影且去除陰影后模型反演精度較高、更穩定。同時研究發現NDCSI更適用于果樹冠層陰影的去除,對今后基于遙感影像進行植被營養元素反演具有重要意義。
與對原始影像進行變換及模型法去除陰影相比,基于陰影指數去除陰影的方法較為簡潔,處理迅速且精度高。陰影削弱了果樹冠層光譜信息,在紅邊波段及近紅外波段尤為明顯,這與XU等[23]和NOH等[34]的研究結果一致。XU等[23]對比不同光照陰影比例下植被冠層高光譜信息,發現不同明暗比例下植被冠層光譜信息于紅邊波段附近振幅差異較大,陰影會削弱紅邊波段的光譜信息;NOH等[34]研究表明,近紅外是分割背景噪聲最敏感的通道,陰影、土壤背景都會干擾近紅外波段的光譜信息。土壤的灰度值低于陰影的灰度值,采用閾值法去除陰影不僅在一定程度上降低了陰影的影響,也緩解了土壤等背景信息對冠層光譜信息的干擾作用(圖2,4)。因此,去除陰影前后光譜信息于紅邊波段及近紅外波段差異較大。
研究發現去除陰影前后冠層氮素的敏感波段均為綠光波段和紅光波段,且基于2個波段構建的光譜參量與氮素含量的相關性均有提升,這與FILELLA等[35]的研究結果一致。此外,結果顯示,無論是線性模型還是非線性反演模型,去除陰影后模型反演精度均高于去除陰影前。陳鵬飛等[36]基于去除土壤背景的無人機影像提取棉花冠層光譜信息并構建主成分分析氮素含量反演模型,發現土壤背景削弱了棉花冠層光譜信息并對氮素反演模型產生了影響,結果顯示去除土壤背景后構建的氮素反演模型精度高于去除前。本研究中發現,陰影及土壤背景信息削弱了果樹冠層光譜信息,基于2個陰影指數去除陰影后,陰影及土壤背景信息得到了有效去除,因此基于陰影指數去除陰影后氮素反演模型精度均有所提升。
基于陰影指數去除陰影的方法操作簡單且去除陰影后氮素反演精度有所提升,但本研究試驗范圍僅局限于一個果園的尺度中,該方法在衛星遙感影像中的應用還需進一步探究。閾值的確定是基于閾值法去除陰影的關鍵,雖然本研究確定的閾值取得了較好的陰影去除效果,但篩選過程花費時間較長,更加快速準確的確定陰影指數的合適閾值是下一步的研究方向。果樹具有復雜的冠層結構,當傳感器觀測方向與太陽直射方向不一致時,無人機影像中通常出現陰影。本次研究過程中沒有較多從輻射傳輸角度出發,通過構建輻射傳輸模型模擬更加準確的冠層光譜信息,以減少陰影對氮素反演模型精度的影響,這也是今后的研究方向[37-38]。
4 結論
(1)NSVI和NDCSI2個陰影指數都可以識別果樹冠層影像中的陰影。對比2個陰影指數的識別效果,NDCSI較NSVI有更強的陰影識別能力。
(2)陰影削弱了果樹冠層光譜信息,對紅邊波段和近紅外波段的阻礙作用較為明顯。
(3)對比去除陰影前后構建的冠層氮素模型反演精度,去除陰影后構建的模型反演精度更高,最優模型為基于NDCSI去除陰影后構建的支持向量機模型,其建模集R2、RPD分別為0.774、1.828,驗證集R2、RPD分別為0.723、1.819。
基于NDCSI可以有效去除果樹冠層陰影,提高葉片氮素含量反演精度,為果樹科學施肥決策管理提供有效幫助。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19