UWB精確定位自適應無跡卡爾曼濾波算法
2021-06-02 10:49:08王孜洲臧利國唐一鳴賈鵬王德海
農業裝備與車輛工程 2021年5期
王孜洲,臧利國,唐一鳴,賈鵬,王德海
(1.211167江蘇省 南京市 南京工程學院 汽車與軌道交通學院;2.211167江蘇省 南京市 南京工程學院 自動化學院;3.211167江蘇省 南京市 南京工程學院 電力工程學院)
0 引言
隨著位置服務的快速發展,人們對高精度定位技術的需求越來越高。定位技術廣泛存在于生活的方方面面,在工業生產、日常生活中發揮著巨大的作用。超寬帶定位技術(UWB)是近年來興起的一項室內定位技術,以非正弦波窄負脈沖傳輸信號。其抗多徑能力強,定位精度高,且對信道衰弱不敏感,難以截獲,成為最受關注的定位技術之一。
然而在實際應用中往往存在障礙物遮擋、金屬干擾等情況,會給UWB測距帶來較大誤差(NLOS誤差),嚴重影響UWB定位精度。為抑制NLOS誤差,提高定位精度,鮑小雨[1]等提出了一種改進的擴展卡爾曼濾波(IEKF)算法,通過實際觀測值和預測值的差值大小,確定是否存在NLOS誤差,若存在誤差,則將濾波增益設置為零,從而減小NLOS誤差對定位的影響。試驗顯示,該系統一定程度減小了NLOS誤差,但該方法依賴于閾值的設定,且誤警率較高,難以應用于實際工程中;李旭虹[2]等提出一種改進的無跡卡爾曼濾波算法,以聯合定位的初始坐標作為濾波觀測值,并在無跡卡爾曼濾波的更新方程中直接減去NLOS誤差項,避免了UKF濾波的發散。此種方法在建模時,將NLOS誤差假設為服從指數分布,然而實際測量中,NLOS誤差并非完全服從指數分布,因而濾波精度有所下降。
針對上述問題,為保證誤差抑制效果,本文首先對信道環境進行鑒別,若為LOS環境,則進行無跡卡爾曼濾波;若存在NLOS誤差,則針對性地引入自適應因子,對協方差進行修正,從而減小誤差。
1 TOA的定位原理和誤差模型
1.1 TOA定位原理
基于到達時間(TOA)定位利用測量信號在基站和標簽之間的到達時間,求出每個基站與標簽之間的距離,進而通過距離實現定位[3]。一般采用3個基站進行定位,其定位模型如圖1所示。
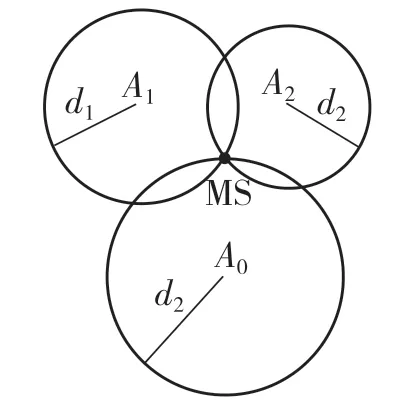
圖1 TOA定位原理Fig.1 Positioning principle of TOA
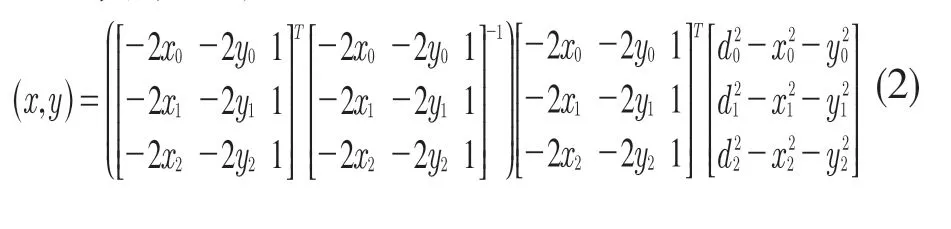
圖1中,A0,A1,A2為UWB基站位置;MS為標簽位置;測得基站A0,A1,A2與標簽MS的距離分別為d0,d1,d2;分別以基站為圓心、距離為半徑作3個圓,三圓交點即為標簽MS的位置。設3個基站坐標為(x0,y0),(x1,y1),(x2,y2),標簽坐標為(x,y),根據定位模型可列如下方程:
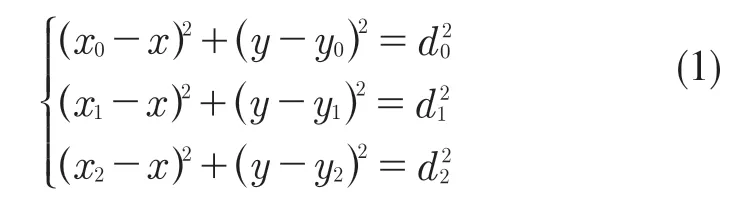
求解可得
1.2 誤差模型
在NLOS環境下,直達單徑分量DP到達基站需經過障礙物,由于障礙物的介電系數大于1,會給測距模型帶來附加時延[4]。通常認為,此附加時延會導致正均值的隨機誤差,定位結果由點坐標變為如圖2所示的陰影區域,大大增加了定位的不可信度,同時提高了計算的復雜程度,導致計算效率降低。
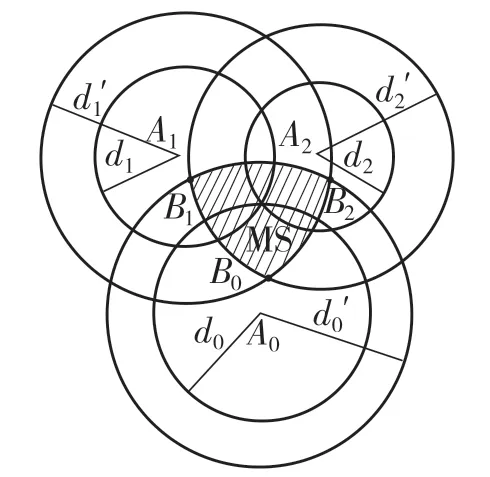
圖2 定位誤差模型Fig.2 Positioning error model
設陰影部分3個圓兩兩相交的3個交點為B0,B1,B2,坐標分別為,,為減小計算量,將基站設置于等邊三角形的3個頂點處,以兩點 A1,A2連線為X軸,連線中點為原點建立坐標系。
交點坐標可由兩圓聯立方程求解:
同理,可求出B1,B2的坐標,根據坐標算出 B0,B1,B2三點與實際標簽位置的距離為T0,T1,T2。距離公式:

由此得出,NLOS環境下引入的定位誤差可達max(T0,T1,T2),具有極大的不確定性,大大減小了UWB的定位精度。
2 NLOS信道鑒別
由式(5)可知,NLOS誤差的存在會給UWB定位帶來極大的干擾。為保證誤差抑制效果,本文采用峭度作為參數鑒別UWB信道環境,若峭度參數異常,則說明存在NLOS誤差,便可引入自適應因子,有針對性地剔除NLOS誤差,從而保證定位精度。
UWB信號在IEEE802.15.4a標準下,信道沖激響應(CIR)可表示為[5]

式中:l——第l條多徑;L——多徑總數;al,τ1——第l條路徑的幅度增益和時延;δ(x)——單位能量的單徑脈沖函數,其性質如下:
為鑒別是否存在NLOS環境,提出使用峭度作為衡量信道狀態的參數。峭度K定義為波形四階矩和二階矩平方的比值,即

式中:μ——t時刻O(t)的均值,峭度作為信號的歸一化四階矩,對信號中的沖擊特征尤其敏感。
四階矩定義數據的峰度表征數據在均值處的峰值高低;二階矩即方差,表征數據的離散程度。峭度作為四階矩與二階矩的比值,可以表征數據相對于正態分布是陡峭還是平坦。對于高K的數據,傾向于在均值附近有更明顯的峰值,下降更迅速,數據更聚攏;對于低K的數據,傾向于在均值附近有更平坦的峰值,下降緩慢,數據更為離散[6]。一般LOS環境中因為沒有阻擋,數據變化更為劇烈,傾向于有更高的峭度;NLOS環境中數據變化較為緩慢,傾向于有更低的峭度。故峭度可作為衡量NLOS誤差的參數,表示如下;
式中:thresh——設定的閾值,因K=3時,波形具有正常峰值(零峭度),故取thresh=3。
3 自適應無跡卡爾曼濾波算法
3.1 定位模型
根據TOA定位原理建立定位模型。將基站A0,A1,A2固定,以A1,A2連線的中點作為原點O建立空間直角坐標系。標簽MS的狀態向量分別由標簽的平面坐標(x,y)和在方向上的速度vx、vy構成,可列狀態方程如下:
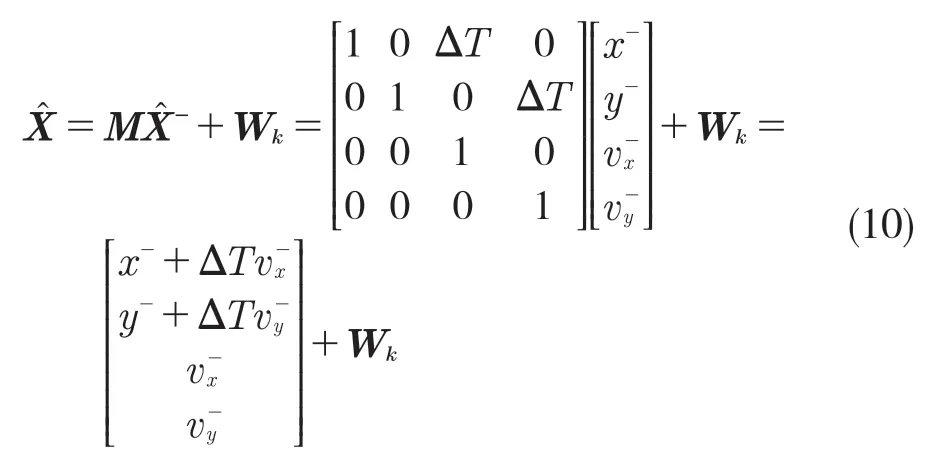
為使UWB的精度提高,可采用數字濾波算法優化定位數據。
3.2 標準UKF算法
卡爾曼濾波(KF)是目前應用廣泛的數字濾波技術,其利用上一系統狀態的數據和量測數據,通過線性系統狀態方程求出當前狀態最優估計值,在遞歸過程中提高預估精度[7],但是,由于計算時必須通過線性系統狀態方程,所以,只適用于高斯線性模型。
對于非線性濾波問題,在卡爾曼濾波的基礎上主要有兩種發展:擴展卡爾曼濾波(EKF)算法和無跡卡爾曼濾波(UKF)算法。其中,EKF的核心是通過泰勒展開來處理非線性狀態方程和觀測方程,只取泰勒展開式的一階項來實現線性化[8]。但EKF也只適用于線性化較弱的系統方程,否則同樣會導致濾波器性能下降,影響其收斂性。而UKF的核心是利用UT(Unscented Transform)變換來對均值和協方差進行處理,從而避免線性化帶來的誤差。相比EKF,UKF不需要計算非線性函數的Jacobi矩陣,計算量大大減少,且UKF沒有忽略高階項,計算精度更好,適用性也更強(例如:UKF可以應用于復雜的NLOS環境)。
首先對濾波進行初始化:
選取2n+1個Sigma樣本點,n由研究對象的狀態維數決定,本文主要研究UWB定位模型,可取n=2,選取方式如下:
式中:χ——調整逼近的精度的尺度參數,適當調整可提高精度,且其中,α——一個較小的正數,取值范圍10-4≤α<1,常取0.001,確定周圍Sigma樣本點的分布情況;β——有關狀態分布的參數,在高斯分布時最優取值為2;λ——比例因子,通常取0或3-n。對于上述α,λ,β這3個參數,都可以適當調節來提高計算過程中的估計值和方差的精度[9]。
UKF算法主體主要分為3個步驟,分別是預測更新、迭代更新和量測更新[10]。預測更新中,先對Sigma樣本點進行非線性變換,接著根據變換后的Sigma樣本點計算預測估計值和預測協方差

式中:Wim,Wic——計算均值和協方差的權值,計算方法如下:

3.3 自適應UKF
對于標準UKF,雖然相比EKF可以更好地處理非線性系統,但是,如果存在系統數學模型誤差或者系統噪聲特性不精確等情況,極有可能影響濾波的精度,甚至導致濾波的發散。此外,初始化的取值對UKF算法也存在影響,如果取值存在誤差會導致濾波估值的精度下降、收斂速度慢。針對以上存在的問題,本文采用了一種自適應UKF算法[11]。
首先,針對UKF算法在不同測量環境需要自適應的程度不同,需要一個隨環境變化的自適應因子,為此構建了測量殘差向量:

式中:yk——該時刻UWB的真實測量值;測量的估計值。當系統預測出現異常,或與系統模型不符,為使濾波保持精度,可引入自適應因子[12],構建如下:
式中:μk——所構建的自適應因子(0<μk≤1),可判別濾波中是否存在狀態模型誤差,并且對誤差有自適應調節的作用。
將構建的自適應子加入標準UKF中,可對其進行修正
由以上分析可知,當系統模型等都正常時,μk=1,對濾波結果沒有影響;當初始值的選取可能存在異常或是狀態模型存在偏差時,μk<1,即濾波結果對預測的估計值信任程度下降;當狀態模型錯誤時,μk無窮接近于0,與其相關的值可完全舍棄[13]。因此,當濾波結果出現異常時,系統能做出自適應調節,減少異常值造成的影響,使最終得出的濾波結果相對準確。
恰當設置自適應因子,能夠對狀態方程預測值和測量值的權比進行自適應平衡,也能降低系統模型誤差對濾波的影響。此外,自適應因子在濾波的遞歸過程中不斷對增益矩陣進行修正和調節,在此過程中UKF算法的抗差能力也得到提高。
4 試驗與分析
為驗證本文算法對UWB定位數據的優化效果和對NLOS誤差的修正能力,在10 m×10 m的實驗室環境中,進行了模擬NLOS試驗。試驗采用典型帶寬為500 MHz的DWM1000射頻模塊,通信速率6.8 m/s,發射功率為-62~-35 dBm/MHz。
UWB的定位環境如圖3所示。基站 A0,A1,A2沿邊長為6 m的等邊三角形頂點放置,虛線表示標簽MS運動軌跡。
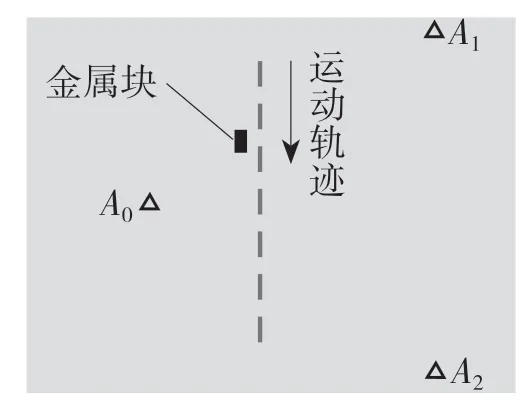
圖3 試驗環境Fig.3 Test environment
在基站A0與軌跡之間插入一塊金屬塊,當標簽、金屬塊和基站A0三者在同一直線上時,介電系數大于1的金屬塊會干擾直達單徑分量DP的傳播,形成強NLOS環境。分別采用傳統定位算法和本文算法進行定位試驗,試驗結果見圖4。
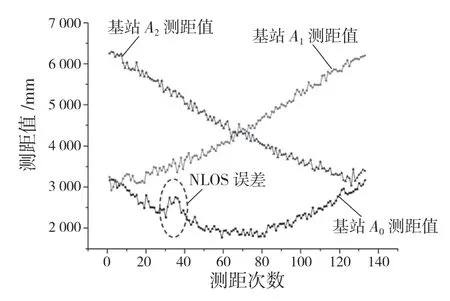
圖4 基站測距值Fig.4 Base station ranging value
圖4為基站 A0,A1,A2與標簽MS的測距值,從圖中可看出第30次到第40次測距中,基站A0受金屬塊影響,測距值出現突變,表現在定位結果中即如圖5所示。
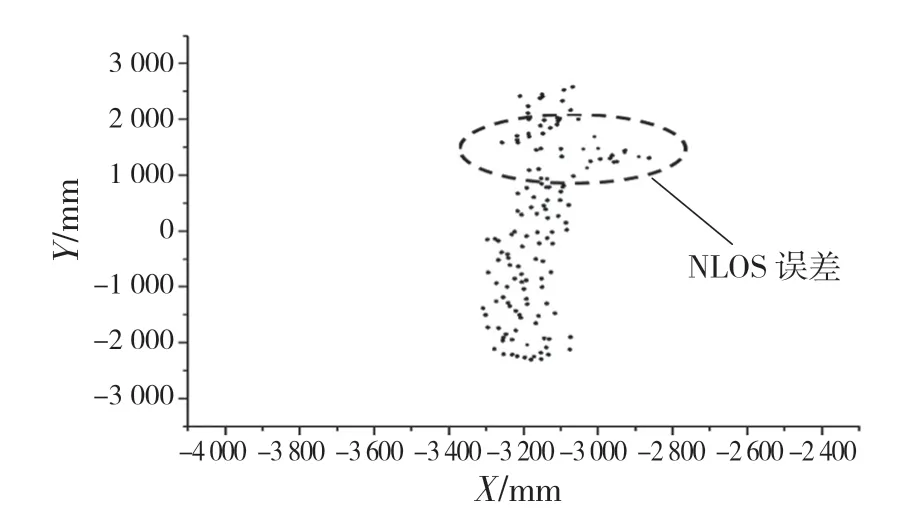
圖5 原始定位結果Fig.5 Positioning results
圖5為傳統算法定位結果,可看出數據在y=-1 500 mm處開始出現異常,隨后定位出現較大誤差,最大誤差值達到了335.89 mm;圖6為本文算法定位結果,顯然數據波動更小,并且原NLOS誤差處相對平緩,最大誤差僅為158.83 mm,相比傳統算法最大誤差下降了52.7%。為對比整體定位結果,計算了RMSE(均方根誤差)值與MAE(平均絕對誤差)值。參見表1。
其計算方法如下:
式中:x*——標簽MS在x方向的真實距離;xi——第i次定位中本文算法解算出的標簽MS在x方向的測量值;n——測量總次數;RMSE值——誤差平方均值的平方根,一般用來表示定位數據的離散程度;MAE值——誤差絕對值的平均,可用來表示定位數據的整體誤差。
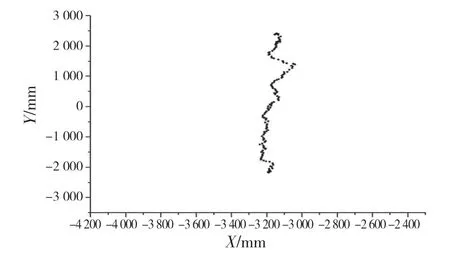
圖6 本文算法定位結果Fig.6 Positioning results of the algorithm in this paper
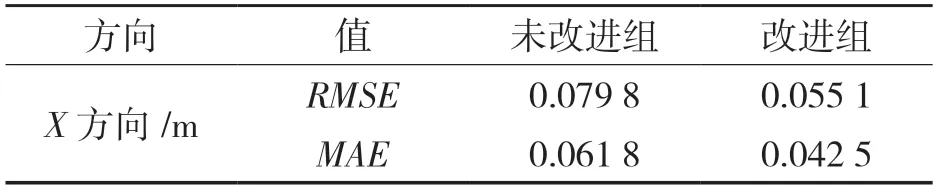
表1 試驗結果Tab.1 Test results
試驗表明,本文提出的算法對UWB的數據優化明顯,并且能夠準確鑒別并修正NLOS誤差。
5 結語
UWB作為當前精度最高的室內定位技術,其發射信號功率譜密度低,截獲率低,但受環境影響顯著。本文根據UWB的TOA定位原理,分析了UWB在NLOS環境下的誤差模型。并通過計算峭度判別UWB信道環境,對于參數正常的情況,判定為LOS環境,采用適用于非線性模型的標準無跡卡爾曼濾波算法進行濾波;對于參數異常的情況,判定為NLOS環境,在UKF算法的基礎上加入自適應因子修正增益矩陣,進而減小NLOS誤差。經試驗驗證,該算法有效實現了對定位結果的優化和對NLOS誤差的修正,提高了UWB的定位精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39