機械臂球鉸鎖緊結構設計與預緊力分析
2021-06-02 10:49:16鐘志豪崔建昆呂嗣孝
農業裝備與車輛工程 2021年5期
關鍵詞:機械
鐘志豪,崔建昆,呂嗣孝
(200093上海市 上海理工大學 機械工程學院)
0 引言
機械臂在運動時常常需要保持指定的位姿,其關節必須在指定的位置鎖緊,因此,機械臂關節鎖緊是機械臂設計中尤為重要的一環。北航機器人研究所主要采用了2種機械臂關節鎖緊結構:一種是利用電磁離合器,將其安裝在各個關節處,通過離合器通斷電后的閉合實現鎖緊,但其初始成本過大,且后期維護難度也相對較大;另一種是機械鎖緊,彈簧在關節外拉緊摩擦片,使得外圈抱緊摩擦片從而實現鎖緊,但摩擦片長期使用后,摩擦系數越來越小,終將導致鎖緊能力下降[1]。
北京石油化工學院郭麗峰[2]等設計了一種球鉸快速鎖緊裝置,該結構是利用電磁鐵通斷電使得鎖緊推桿推動鎖緊盤,松放球鉸內球體實現鎖緊,但此方法維修比較困難;潘保安[3]設計了一種可調節鎖緊力的液壓鎖緊缸,但其需要額外的液壓源,同時,還存在泄漏的問題;蘇州大學匡紹龍[4]等設計了一種被動機械臂關節鎖緊機構,通過螺紋軸套與剎車盤片互相抵緊實現鎖緊,但其剎車盤片和上述摩擦片相似,長期使用會使摩擦系數變小,導致鎖緊能力下降。
針對上述鎖緊機構存在的問題,本文設計了一種氣壓驅動的球鉸鎖緊機構,并對其中的碟形彈簧進行預緊力分析計算。球鉸結構較其他結構有更快的鎖緊速度,采用氣壓鎖緊雖然難以伺服控制,但能提供較大鎖緊力,且高壓氣體源可以經過壓縮后儲存在很小的容器中,可降低機械臂整體體積。
1 球鉸鎖緊結構設計
球鉸鎖緊結構主要由鎖緊機構、解鎖機構、預緊機構、高壓氣缸、單向閥等組成,如圖1所示。在平常狀態下,球鉸被彈簧施加的預緊力壓緊鎖死,需要解鎖時由高壓氣推動活塞釋放球頭。本次采用的是碟形彈簧,它能在小變形量內對球頭提供較大的預緊力。鎖緊機構為球鉸提供正壓力使其鎖緊;解鎖機構利用氣缸活塞受到高壓氣推擠產生位移,導致球窩脫離球頭從而解鎖;預緊機構用于在安裝過程中擠壓碟形彈簧從而調節機構預緊力,而4個單向閥分別控制左右臂高壓氣缸的進氣排氣。
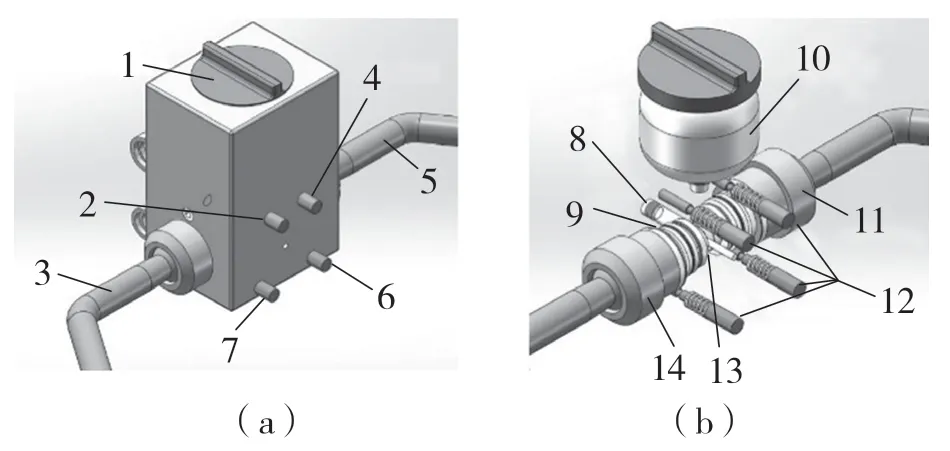
圖1 關節鎖緊結構三維圖Fig.1 Three-dimensional diagram of joint locking structure
如圖2所示,控制過程如下:左解鎖閥處于閉合狀態,高壓氣體無法進入氣缸,左側球碗受彈簧預緊力壓緊球頭,右解鎖閥打開高壓氣體進入氣缸中,推動活塞向左運動,球碗脫離球頭,對球頭的壓緊力消失,球頭可自由活動;左鎖緊閥被按下,左側氣壓缸與外界大氣相通,活塞受左側碟形彈簧預緊力作用將球碗壓緊在球頭上,右鎖緊閥閉合,高壓氣體被密封在右側氣缸中,在不考慮氣體泄漏的情況下,右側活塞持續受高壓氣體推力,球頭處于解鎖狀態。
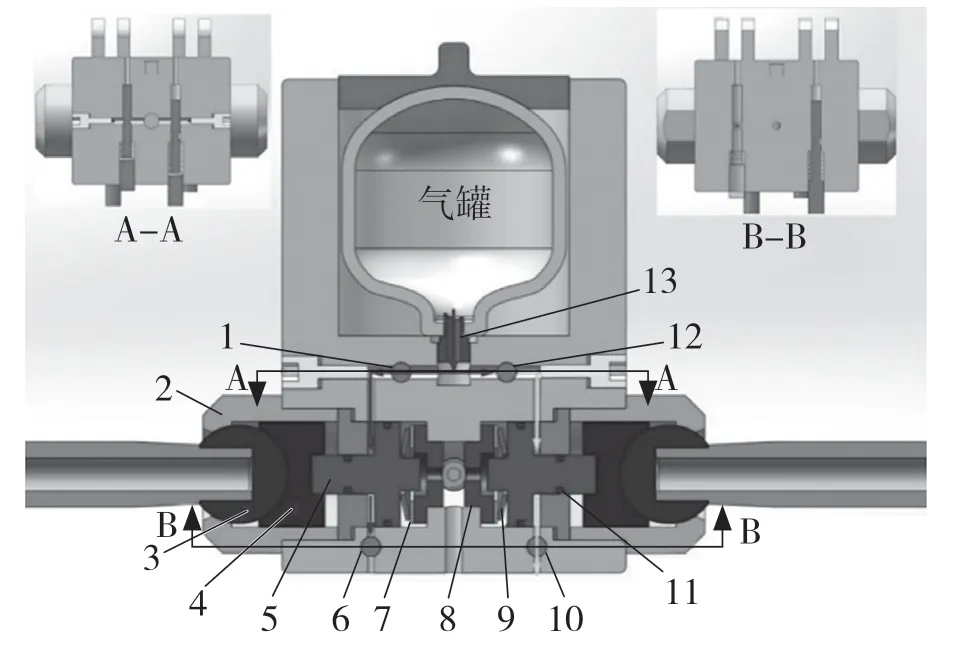
圖2 單向閥控制圖Fig.2 Control diagram of one-way valve
2 關節預緊力計算
球鉸具有3個自由度,小臂受扭矩、拉力、壓力作用時,可分為在空間3個平面的受力。小臂在水平面上所受扭矩最大,要保證小臂鎖死,則球碗、球蓋對球頭的摩擦扭矩必須大于水平面內所受最大扭矩。球碗、球蓋、球頭三者在接觸時會發生彈性變形,其橫截面如圖3所示,球碗受到力F向上運動。

圖3 球頭受力形變圖Fig.3 Deformation of ball head under force
因球碗不可能為剛體,三者屬于柔性體非線性接觸,其形變量與柔性體形狀、材料、厚度等有關,要精確計算出球鉸鎖緊時的摩擦扭矩非常困難,采用近似求解方法也能滿足要求,為了計算方便引入下列假設:
(1)假設球面處的應力密度q按余弦分布

式中:q0——球窩球面最高象限點的接觸應力;β——球面任意一點的圓心半角。
(2)整個球面潤滑情況相同,即摩擦系數處處相同。
(3)球碗球頭完全貼合。
(4)不考慮球面半徑偏差。
以上述假設為前提,球碗球窩受力簡圖如圖4所示。

圖4 球碗球頭受力簡圖Fig 4 Schematic diagram of ball bowl head force
圖4中:α——球窩球面最大張角;R——球面半徑;O——球心點;B——球面上任意一點;F——球窩所受的推力。
球碗上任意一點B處產生摩擦力f,摩擦力的方向為B點的切面與通過B點垂直于z軸且平行于xoy的平面。采用球面坐標表示B點[5],則球碗上任意一點B的微面積

球面上任意一點微面積上的正壓力

沿z軸方向力的合力:

由式(4)可得

則球面上任意一點處應力:

圖5是任意一點B的空間關系簡圖。圖中的l為B點到z軸的垂直距離。

圖5 B點空間關系簡圖Fig.5 Schematic diagram of spatial relationship of Point B
由幾何關系可知
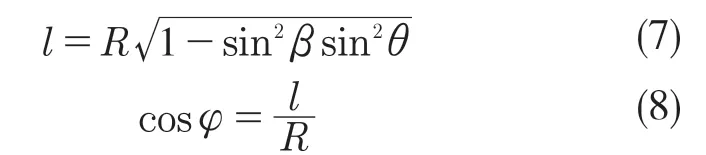
球頂接觸面間的摩擦力f對z軸的摩擦力矩

球頭所受摩擦力由2部分組成,一部分來自于球碗,一部分來自于球頭。根據式(9)可得,球碗對球頭的摩擦力

球蓋與球頭的接觸區是一條球帶,同理可求得球蓋對球頭的摩擦力矩

球碗、球蓋對球頭的鎖緊力矩必須大于小臂所受最大扭矩M,即

三者接觸時形成的摩擦力為靜摩擦。為提高安全性,增大接觸表面摩擦系數,球碗、球蓋、球頭表面噴涂防滑涂料。采用非晶態鐵基金屬材料,例如 SAM2X5,SAM7,具有優異的耐磨耐腐蝕性能,能夠滿足嚴苛的使用環境要求[6],其摩擦系數為0.6~0.8。計算時取μ=0.8,α1=75°,α2=0,α3=85°,α4=45°,R=10 mm,M=15 N·m,代入(12)可求得

因此,碟形彈簧施加的預緊力只要能夠大于1.326 kN即能夠滿足球鉸鎖緊需求。
3 結論
本文的氣壓驅動的機械臂關節球鉸鎖緊結構使用氣壓驅動可提供較大鎖緊力,且氣體壓縮后可儲存進小型容器中,可減小機械臂整體體積。采用碟形彈簧對關節處進行預緊力計算分析,在球碗、球蓋、球頭表面處噴涂防滑涂料,使其能在嚴苛的工作環境下工作。最后,計算出碟形彈簧需要施加1.326 kN的力才能滿足球鉸鎖緊的需求。本文為后續碟形彈簧受力分析、預緊機構受力分析與結構設計以及關節鎖緊力試驗提供了參考。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09