高效橘子采摘裝置的設計
2021-06-02 10:49:24林吉
農業(yè)裝備與車輛工程 2021年5期
林吉
(316000浙江省 舟山市 浙江海洋大學 船舶與機電工程學院)
0 引言
橘子是重要的經濟作物之一,我國是橘子的主要原產國之一,橘子的采摘對果農的經濟收入有很大的影響。我國柑橘果園普遍存在機械化程度低的問題,目前橘子的采摘大多是采用剪斷果柄的方法,采摘多為人工采摘,效率較低,成本高[1-4]。為提高采摘效率,國內外學者一直在研制橘子采摘機械設備。橘子采摘機械設備必須考慮到橘子生長朝向具有各異性:其果柄有水平方向生長、豎直方向生長、傾斜方向生長等,如圖1所示。橘子生長朝向各異性導致機械設備在采摘時,定位存在很大的困難。

圖1 橘子生長各異性Fig.1 Anisotropic growth orientation of orange
另外,采摘時,不僅要保證果柄和橘子不會分離,而且還必須要控制剪下來的橘子果柄長度幾乎為零,剪下來的果柄如果過長,容易剪到下一季節(jié)生長橘子的枝條,影響來年產率,更重要的是,收集時較長的果柄會損壞其他橘子。
1 采摘裝置的結構與工作原理
1.1 結構組成
基于空間凸輪的橘子采摘裝置整體結構如圖2所示,其主要由環(huán)形剪切結構(1),環(huán)形聯(lián)動機構(2),伸縮機構(3)組成。
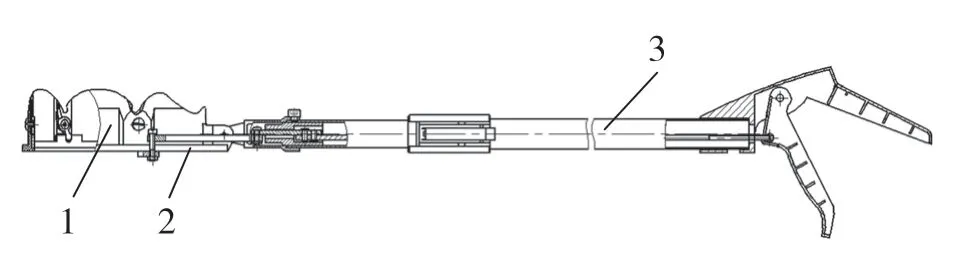
圖2 基于空間凸輪的橘子采摘裝置整體結構圖Fig.2 Overall structure of orange picking device based on spatial cam
1.2 工作原理
使用本裝置采摘橘子需3個步驟,使用者根據采摘習慣,調整環(huán)形剪切機構與中間桿的角度,用蝴蝶螺母鎖緊,使兩者不能發(fā)生相對轉動。然后,在環(huán)形內圈上安排了5把剪刀,它們相互成約52°分布,以適應橘子的不同朝向。使用者將環(huán)形剪切機構套住橘子,在重力作用下,無論橘子哪個朝向,都會自動順著內圈上的導向弧口滑入一個最合適剪切口。操作者按下手柄,手柄轉動時,可使滑塊沿直線方向移動,滑塊移動時,可帶動曲柄轉動,即帶動空間凸輪旋轉,控制5把剪刀片完成剪切動作將橘子剪下。剪下的橘子經過半凹型果袋,經緩沖、翻轉,最后低速滑入到果籃中。
2 關鍵部件設計
2.1 環(huán)形剪切機構的設計
外圈外殼考慮塑料件進行上下拔模加工,壁厚加至3 mm,為保證剪切效果,內外剪刀片材料依然采用蘸火處理過的白鋼條。由于實際采摘時2個刀位幾乎沒有用上,設計為5個剪切位,各剪切位相互成約51.43°。在每個剪切位上設有剪切平面,確保剪刀片與內圈之間相互貼緊,無間隙,便于剪斷橘柄。根據內徑140 mm實際需要,將外圈內徑擴大,考慮減重處理,材料選擇為塑料件,這里選取PA-6,彈性模量2.62×109 N/m2,泊松比0.34,質量密度1 120 kg/m3,環(huán)形剪切機構如圖3所示。為了檢驗是否達到要求,運用有限元軟件進行有限元分析,分析結果如圖4所示,滿足使用要求。

圖3 環(huán)形剪切機構Fig.3 Ring shear mechanism

圖4 外圈有限元分析結果圖Fig.4 Result chart of outer circle finite element analysis
2.2 環(huán)形聯(lián)動機構的確定
環(huán)形聯(lián)動機構主要由空間凸輪機構、反向曲柄滑塊及曲柄滑塊機構組成,只要按下手柄,控制5個剪刀片聯(lián)動,完成各向剪切。
2.2.1 空間凸輪的設計
為了設計符合要求的空間凸輪,首先將復雜的空間凸輪轉化為相對簡單的直線凸輪進行分析。預設初始參數,設計出直線凸輪,如圖5所示。凸輪外圈上的外刀片固定不動,剪刀刀柄嵌在直線凸輪的凹型口中,直線凸輪在剪切平面的左右移動過程中,可以控制剪刀刀柄來回旋轉,完成剪刀的張合動作。

圖5 直線凸輪示意圖Fig.5 Schematic diagram of linear cam
當直線凸輪的右行程超出臨界線右邊線,剪刀刀柄會脫離直線凸輪的凹型口,直線凸輪不能控制剪刀片。同理,當直線凸輪左行程超出臨界邊線,直線凸輪不能控制剪刀片。
為防止剪刀脫離直線凸輪,必須設置一定的限位。為了更節(jié)省材料及采摘果實時采摘頭部與果實接觸的內環(huán)面盡可能接近圓弧面,方便采摘果實,不采用增添材料制造擋階,而是采用外圈內壁上切除部分材料的設置,左右擋階對剪刀轉角進行限位處理。在外圈上設置一定距離的擋階,利用刀背與內圈進行限制剪刀片過大轉角。
設左右擋階與剪刀轉動軸所處的豎直平面距離均為11 mm,直線凸輪右移,將剪刀推到張開位,會被限位擋階阻擋住而不能右移,在三維裝配體上設置限位,內刀背面與擋階面相切時為極限狀態(tài),此時測得直線凸輪右行程dx=6.90 mm,遠小于極限右行程S1=7.6 mm;直線凸輪左移,將剪刀推到閉合位,會被限位塊阻擋而不能左移;同樣,在三維裝配體上設置限位,此時刀尖與右擋階接觸時為極限狀態(tài),測得直線凸輪左行程dx=6.44 mm,遠小于極限左行程S2=7.18 mm),檢驗結果符合實際功能需要。
直線凸輪在剪切平面的總行程為6.90+6.44=13.34 mm,相對于外圈中心軸轉動角度約為7°(內圈直徑為140 mm)。為實現5個剪切位聯(lián)動,將控制5把剪刀片的直線凸輪組合成了一個環(huán)形空間凸輪,空間凸輪結構如圖6所示。
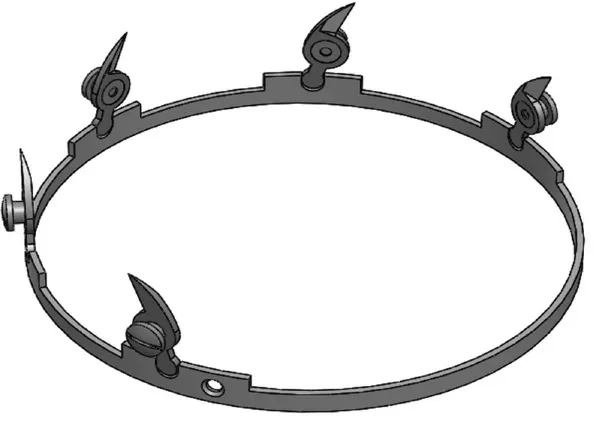
圖6 直線凸輪構成空間凸輪Fig.6 Linear cams form spatial cams
2.2.2 曲柄滑塊結構的設計
當成環(huán)形空間凸輪轉動時,可帶動5把剪刀同時運動。為了將把手的運動轉化為空間凸輪的轉動,采用如圖7所示的機構。圖7中,BCD,DEF各構成一個曲柄滑塊機構,手柄AC繞B點轉動時,可使滑塊D沿直線方向移動,滑塊D移動時,可帶動曲柄EF轉動,即帶動空間凸輪旋轉。為了簡化結構,我們將曲柄滑塊機構BCD隱藏于手持桿中。
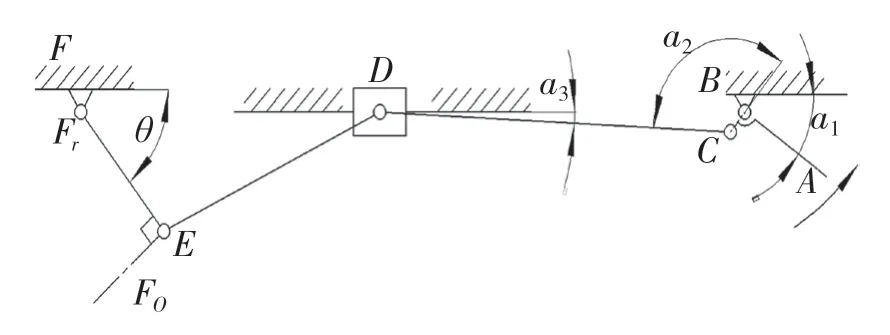
圖7 傳動機構簡圖Fig.7 Transmission mechanism diagram
為保證最大省力,需要對各個連桿長度(lEF,lDF,lCD)及曲柄初始角度(θ)進行確定:
機構主要由曲柄滑塊BCD,DEF組成,曲柄滑塊BCD裝在伸縮桿中,伸縮桿直徑為18.5 mm,伸縮桿伸出到極限狀態(tài)長度為3.5 m,lAB=150 mm,lBC=27 mm,操作者可以比較舒服地施力,握把手時施加力Fin=10 N,控制把柄(桿AB)轉動角度a1=5°~75°,滑塊行程為20.4 mm。
內圈直徑為140 mm,根據柑橘屬中最大的類別而設計。為保證采摘過程不會產生干涉,lEF≥0.07 m;為保證行程能夠滿足剪切,空間凸輪在外圈切向的行程需大于13.5 mm。
剪切時,人手輸入力Fin,根據轉矩平衡原則

滑塊受到的力

由式(1)、式(2)解得
令lED=x1,lDF=x2,lEF=x3,根據三連桿長度確定θD

由海倫公式

可得

根據上述要求建立數學模型:

式中:x1,x2,x3——設計變量;M(X)——剪切力矩;Ci(x)——連桿長度關系表達式;L(x)——空間凸輪在外圈切向上的最大行程。
基于Isight平臺搭建力矩最大化設計流程,將力矩M(x)設置為目標函數,限定連桿長度變化范圍、連桿長度互相影響范圍、連桿EF轉角范圍,采用NPQLP序列二次規(guī)劃法求解組合模型[5]。目標函數的迭代收斂曲線如圖8所示。

圖8 迭代收斂曲線Fig.8 Iterative convergence curve
最終分析得最佳參數如表1所示。

表1 最優(yōu)參數表Tab.1 Optimal parameters
2.3 自由伸縮機構
為適應不同采摘范圍的橘子,該機構主要由內空心桿、外空心桿件、滑塊拉動及鎖點定位桿件、節(jié)點鎖扣件等組成,二維結構圖如圖9所示。使用者拉長伸縮桿到合適位置,通過彈簧自動鎖扣扣在合適長度的節(jié)點上,完成伸縮;當需要改變長度時,按下節(jié)點鎖扣件,拉動內空心桿就能再次改變長度。由于伸縮桿在當今較為成熟,直接根據行程選型為1.8~2.8 m。一按一拉完成伸縮,操作簡便,符合人性化的設計理念。
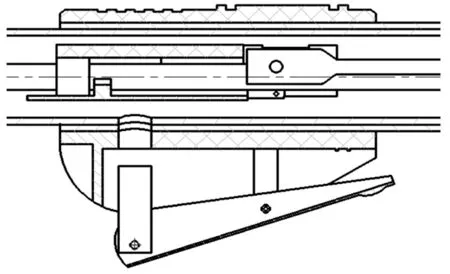
圖9 伸縮機構Fig.9 Telescoping mechanism
為了保證在使用過程中能達到所需要求,應用有限元軟件對中間的空心長桿進行了靜應力分析。中間空心管主要參數為:桿件材料選擇鋁合金,壁厚2 mm,空心管外徑為22 mm,全長2 800 mm,負載合力為10 N,只固定手扶持位置。圖10是有限元分析應力圖及位移圖。

圖10 有限元分析結果圖Fig.10 Results of finite element analysis
由分析結果可知,受力情況正常,遠小于屈服應力,符合強度要求。整根伸縮桿上,離固定端越遠,變形位移越大。位移最大之處在于采摘頭部,由圖可知,本模型最大位移約為5.2 cm,符合使用需求。
3 設計效果評價
本設計提高單人采摘效率2倍以上,遠遠高于市面上各類采摘桿,大幅度降低了人工采摘成本,提高了經濟效益。除此之外,本設計結構精簡、成本低廉,能適應各種采摘環(huán)境,且操作方便。文獻[6]中提到,采摘機械發(fā)展方向應為低成本、高效率,能讓農民買得起、用得起,用處多等。而本采摘器不僅可以采摘橘子,還可以采摘其他類似的果實以及農作物,應用范圍基本沒有限制。本作品還可用于觀光農業(yè)的水果采摘活動或橘子采摘郊游活動。綜上所述,本作品具有較大的市場需求。本作品的開發(fā)不但有良好的經濟效益,還有廣闊的市場前景,而且對新型輔助人工高效率采摘機械裝置的開發(fā)和研究具有重大意義。
4 結語
針對國內橘子采摘問題,提出了一種高效橘子采摘機械裝置,并且已經完成實物制造及實地采摘試驗,效率相比人工大幅度提高。該項設計解決了當今橘子采摘中存在的種種問題。