果蠅優化算法在壓裂變頻冷卻溫度控制中的應用研究
2021-06-02 11:29:46曹澤夏梁志程興民丁小寧肖勇
石油化工自動化 2021年3期
曹澤,夏梁志,程興民,丁小寧,肖勇
(1. 中車永濟電機有限公司,山西 永濟 044502;2. 中石化四機石油機械有限公司,湖北 荊州 434024)
在中國西南地區蘊藏著豐富的頁巖氣資源,儲層分布廣、勘探概率高,具有良好的市場應用前景。壓裂泵組是油田開采的重要設備,其作業性能可直接影響頁巖氣井壓裂效果[1-3]。大功率電驅壓裂裝備采用純電動驅動壓裂泵組裝置,取代了原有柴油驅動壓裂車組方式,具有效率高、成本低、經濟環保等優勢[4]。隨著市場對壓裂泵功率的不斷增大需求,變頻器件容量也不斷增大,其內部電力電子器件在全功率與強電流作業狀態下,會消耗大量能量,使得壓裂電控設備溫度持續升高,如不能較好解決大功率設備的散熱問題,將會對大功率器件產生較大影響,甚至損壞器件。電驅壓裂設備作為壓裂泵組控制的核心,壓裂變頻冷卻溫度控制系統的控制性能也直接影響壓裂作業的安全性和可靠性[5]。
隨著國內外電動壓裂市場的逐漸起步,變頻冷卻溫度控制系統至今仍采用傳統的PID控制算法。但是冷卻循環溫度控制受到壓裂泵作業電壓波動、電磁干擾等影響,溫度控制器參數整定仍然需要人工調節,不僅需要每個平臺作業前的人工優化,而且很難得到理想效果。
近年來,眾多學者在大功率壓裂變頻冷卻溫度控制系統的研究較多,冷明全等[6]為解決鋼鐵生產中大功率變頻期間發熱問題,利用PLC設計了一套大功率密閉式循環純水冷卻裝置,現場試驗表明該設備可滿足生產要求。謝毅等[7]利用傳統PID控制器將大功率變頻冷卻技術應用在風力發電機組,達到了預期的冷卻效果。
本文針對壓裂變頻冷卻溫度控制系統在溫度控制中存在的大時滯、多干擾問題,提出一種基于果蠅優化算法FOA(fruit fly optimization algorithm)的壓裂變頻冷卻溫度控制方案并進行仿真實驗,通過和常規控制器溫度控制相比,驗證該方案的可行性。
1 變頻冷卻工藝及控制難點分析
壓裂泵在工作過程中,需要大功率變頻器調節運轉,而變頻器內部的IGBT等電力電子器件模塊在大功率作業條件下產生熱量從而使溫度升高。為了控制壓裂變頻器內電子元件工作時溫度保持穩定,需要通過冷卻循環給內部環境降溫。壓裂變頻冷卻工藝過程如圖1所示。
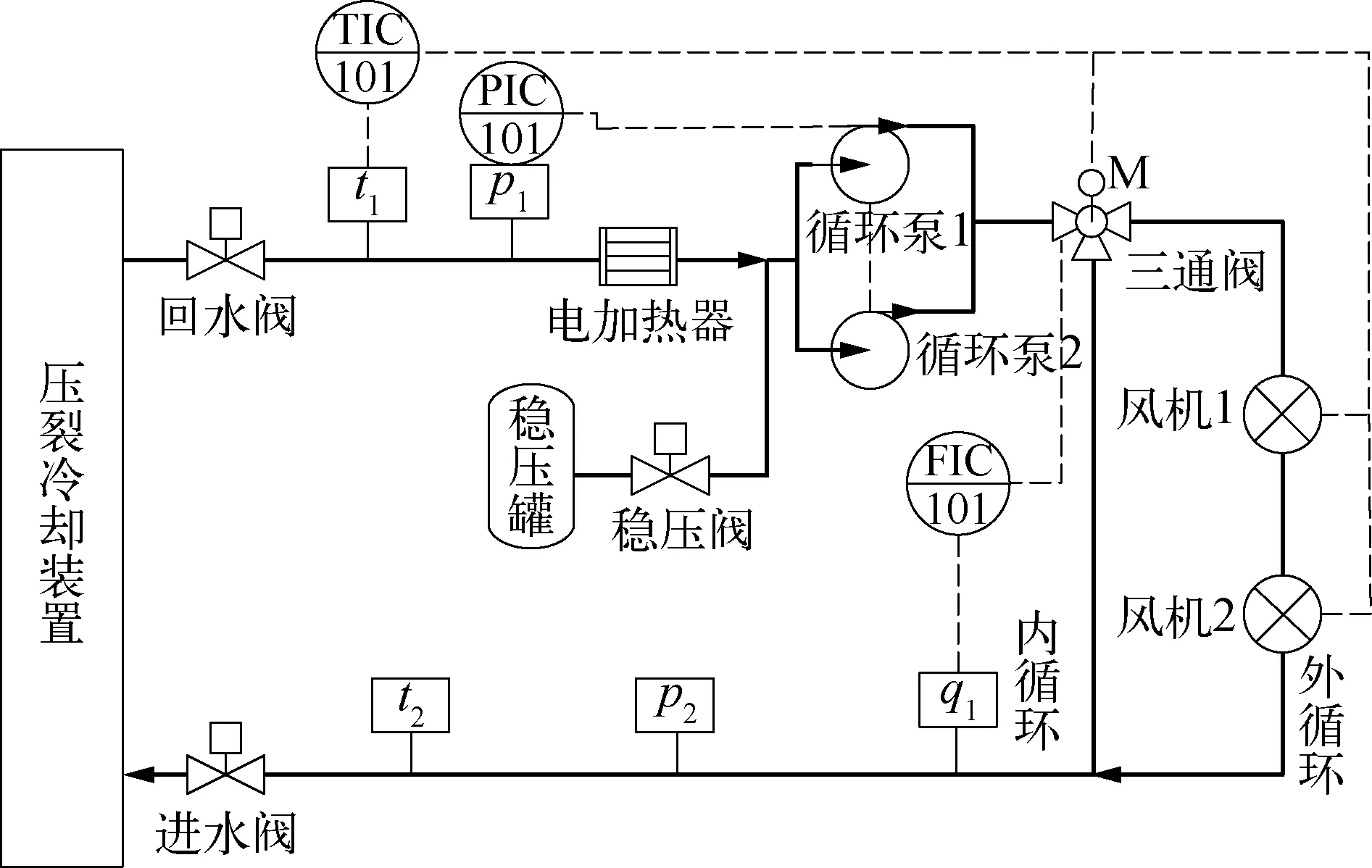
圖1 壓裂變頻冷卻工藝過程示意
當外界環境溫度較低并且未生產作業時,在壓裂泵開機前需啟動加熱器內循環快速加熱冷卻液;當變頻器內部溫度在23~28 ℃時,該系統根據溫度變化采取內循環調節;當溫度傳感器檢測到溫度t1高于28 ℃,該系統將會調節三通外循環閥開度;當壓裂泵長期作業,溫度高至30 ℃時,風機1變頻啟動,達到32 ℃以上風機2也隨之啟動。但由于大功率變頻器內熱能循環無法立即引起回水溫度t1變化,這就使得溫度控制存在超調與滯后現象。
其次,在變頻器作業過程中,冷卻溫度是通過檢測流量q1,從而調節三通閥開度而動作,最終也會受到如管道內流量、壓力波動帶來的干擾影響。
基于以上溫度控制存在的大時滯、多干擾影響,考慮采用基于果蠅優化算法的串級控制器以改善該類問題。
2 果蠅優化算法原理
果蠅優化算法是2011年由Wen-Tsao Pan教授提出的一種基于生物視覺與嗅覺特性覓食的群體智能算法[8-10]。與其他優化算法不同的是,果蠅優化算法具有結構簡單、參數較少、尋優能力較強等優點,近幾年來已被廣泛應用[11]。該算法采用果蠅優化算法優化溫度控制器參數,從而使冷卻循環水的溫度保持平穩。算法實施步驟如下[12-14]:
1)關于種群參數的初始化。設定最大迭代次數Maxgen、種群規模Sizepop,種群隨機位置如式(1)所示:
X0=[KPKIKD]
(1)
式中:KP,KI,KD——PID控制器的比例、積分、微分,可根據壓裂作業工程背景設置合理的取值范圍。
2)關于設定種群搜索隨機方向和搜索步長如式(2)~式(4)所示:
Xi=X0+ω(2rand()-1)
(2)
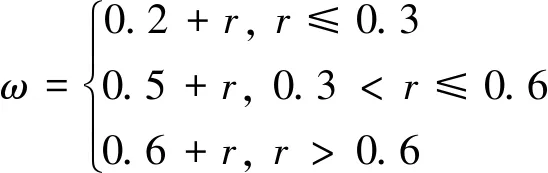
(3)
(4)
式中:r——種群搜索參數時適應度函數的變化率;fitness(i),fitness(n-i)——PID參數尋優的第i代和n-i代時的最優值。
3)味道濃度判定值Si取值為Xi。
4)將味道濃度判定值帶入適應度函數fitness(i)。
5)找到最佳參數值及最佳位置并紀錄。
6)迭代尋優,反復執行步驟2)~5)。
3 壓裂變頻冷卻溫度串級控制器設計
3.1 果蠅優化算法的溫度控制器設計
傳統的溫度控制器采用PID控制器,具有結構簡單、可靠性高、適應性強等特點,控制器設定值r(t)和輸出值y(t)的偏差e(t)=r(t)-y(t)與控制量u(t)之間的關系如式(5)所示:

(5)
基于果蠅優化算法的溫度控制就是在溫度控制器中引入果蠅優化算法,通過算法迭代尋優,自動找到合適的KP,KI,KD三個參數,從而達到理想效果。
在溫度控制中引入果蠅優化算法時,必須建立合理的評價指標作為適應度函數,該方案采用時間t與偏差e(t)的絕對值作為溫度控制器性能評價的適應度函數,通過果蠅優化算法尋優的3個參數組合,使得式(6)的適應度ITAE最小。

(6)
3.2 壓裂變頻冷卻溫度串級控制器設計
為了解決上文提到的溫度控制存在的滯后、干擾等問題,分析得到冷卻溫度控制不僅受到三通控制閥的控制;另一方面,溫度控制也受到流量方面的干擾。串級控制正是一種可以解決以上問題而廣泛應用的方法,因此,考慮在系統結構上采用雙閉環串級控制方案,外環采用溫度控制器,內環采用流量控制器。副回路的引入不僅可以提高系統的響應速度、縮短調節時間,而且也可以很快克服系統二次擾動,提高系統的魯棒性,與傳統的單回路控制器相比,該控制系統在溫度控制中具有更強的抗干擾能力,因此系統將更加穩定。壓裂變頻冷卻溫度控制方案如圖2所示。
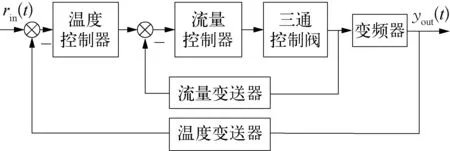
圖2 壓裂變頻冷卻溫度控制方案示意
由圖2可以看出,壓裂變頻冷卻溫度控制系統采用主回路加副回路的形式組成。副回路的引入是將三通控制閥作為被控對象,流量控制器采用傳統PID控制器對其粗略地調控,而主回路中基于果蠅優化算法的溫度控制器再對變頻器內部溫度實施細微的調節與控制,從而減少流量誤差帶來的溫度影響。
4 仿真實驗與分析
4.1 被控對象模型及參數設置
根據壓裂現場作業的工藝要求,并結合該過程控制系統,該控制方案考慮采用Matlab/Simulink作為仿真平臺,對壓裂變頻冷卻溫度控制系統簡化為一階慣性加純滯后環節,其數學表達式如式(7)所示:
(7)
式中:K——靜態增益;T——時間常數;τ——延遲時間。
根據現場調試及記錄,可以得出冷卻溫度傳遞函數如式(8)所示:
(8)
又由于流量控制器中被控對象三通控制閥的系統響應特性[15]如式(9)所示:
(9)
假定果蠅算法的種群大小為50,最大迭代次數為100,KP,KI,KD的取值范圍為[0, 100],采樣間隔為0.01 s,仿真時間為1 000 s。
4.2 仿真結果與分析
為了驗證該控制方案的可行性,按照上述控制策略,在Simulink中搭建系統模型,所設計的基于果蠅優化算法的壓裂變頻冷卻溫度控制系統仿真模型如圖3所示。
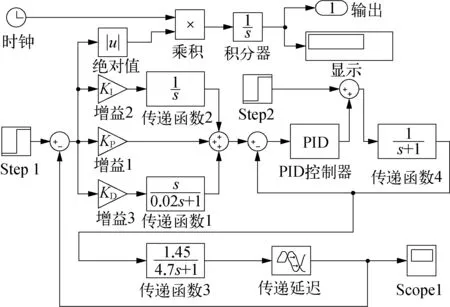
圖3 壓裂變頻冷卻溫度控制系統仿真模型示意
分別針對單回路控制器、串級控制器以及基于果蠅優化算法的壓裂變頻溫度串級控制器進行對比。單回路控制器采用Simulink中的調節器自動整定,果蠅優化算法串級控制器的主回路根據適應度函數進行參數尋優,副回路依然采用調節器整定,得到系統的適應度函數尋優曲線及階躍響應特性如圖4所示。
由圖4可以看出,果蠅優化算法針對所設定的ITAE指標函數,能夠快速迭代尋優,在8 s左右基本可以搜索到最優值的附近,并逐步逼近。這得益于在算法第2)步引入ω,根據適應度值的變化逐步減小搜索范圍,從而找到合適的參數值。
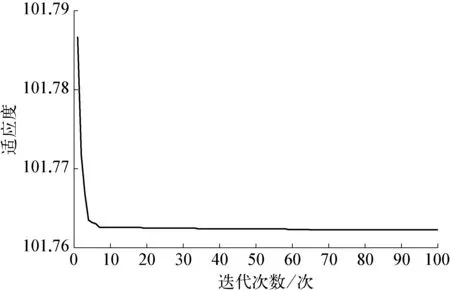
圖4 適應度函數尋優曲線示意
給系統添加單位階躍響應信號,對比單回路控制器、串級控制器以及果蠅優化算法串級控制器的響應效果,如圖5所示。從圖5可以看出,單回路控制器的調節時間較長,約為320 s,超調量約18%。傳統PID串級控制器的響應時間有所提高,超調量也相對串級控制器減少55%以上,但最終調節時間相近。而引入果蠅優化算法后,大幅提高了控制器的調節時間,僅需38 s就可以基本穩定,響應速度快、調節時間短,而且系統無超調。
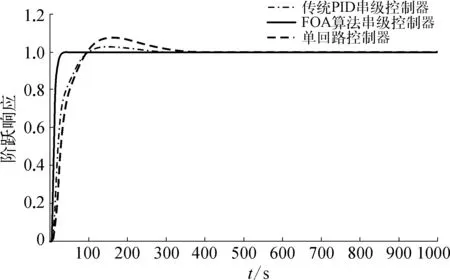
圖5 系統仿真對比示意
5 結束語
該課題提出的基于果蠅優化算法在壓裂變頻冷卻溫度控制中的應用研究可以有效提高系統的響應時間及控制精度,也證明了溫度串級控制器能夠減少超調量和調節時間,但果蠅優化算法的引入更加能提現出串級控制器的效果。系統具有響應速度快、魯棒性好、超調量更小等特點。因此,本文的研究在滿足全電動壓裂變頻冷卻溫度控制的狀況下,也可有效減少大功率器件的損壞,對油田壓裂作業設備開發與應用具有一定的借鑒意義。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
現代企業(2015年2期)2015-02-28 18:45:09
自動化博覽(2014年12期)2014-02-28 22:34:39
