電靜液作動(dòng)器在空中加油中的應(yīng)用研究
2021-06-03 08:00:02周瑜
測(cè)控技術(shù) 2021年5期
周 瑜
(中航西安飛機(jī)工業(yè)集團(tuán)股份有限公司,陜西 西安 710089)
隨著軍事需求的不斷牽引和航空工業(yè)技術(shù)的不斷升級(jí)迭代,具有優(yōu)異飛行性能和持久續(xù)航能力的先進(jìn)飛行器得到廣泛關(guān)注。作為增強(qiáng)航空兵機(jī)動(dòng)能力和打擊能力的重要措施之一,現(xiàn)代空中加油技術(shù)成為了一個(gè)研究熱點(diǎn)。飛機(jī)在空中完成復(fù)雜的加油過(guò)程時(shí),由于高馬赫數(shù)、高速狀態(tài)下氣動(dòng)力變化莫測(cè),為了提高空中加油的精準(zhǔn)性,飛機(jī)姿態(tài)的控制就顯得尤為重要。早期運(yùn)輸機(jī)或直升機(jī)采用機(jī)械式鋼索控制舵面時(shí),操縱力大,飛行員操縱負(fù)擔(dān)重,飛機(jī)姿態(tài)難以精確控制。隨著電傳飛行控制系統(tǒng)的發(fā)展,國(guó)內(nèi)外均采用作動(dòng)器驅(qū)動(dòng)舵面的運(yùn)動(dòng),替代了人工機(jī)械操縱鋼索,直接電信號(hào)驅(qū)動(dòng)伺服系統(tǒng),從而引入液壓源輸出流量驅(qū)動(dòng)作動(dòng)筒的運(yùn)動(dòng),輸出舵面偏轉(zhuǎn)的位移。
作動(dòng)器(舵機(jī))主要是指接受飛機(jī)操縱指令(機(jī)械位移指令或電氣控制指令),利用機(jī)載能源(如液壓源、電源),驅(qū)動(dòng)飛機(jī)操縱面偏轉(zhuǎn)的執(zhí)行部件,作動(dòng)器相當(dāng)于力放大器,是極大地減輕駕駛員操縱負(fù)擔(dān)的一種裝置,為飛機(jī)飛行控制的最后關(guān)鍵一環(huán),能夠精準(zhǔn)控制飛機(jī)舵面的偏轉(zhuǎn),從而實(shí)現(xiàn)飛機(jī)姿態(tài)的控制。目前,為了滿足飛機(jī)向高機(jī)動(dòng)性、高穩(wěn)定性及大功率方向發(fā)展,國(guó)內(nèi)外先進(jìn)的電靜液作動(dòng)器正朝著高壓化、大功率、變壓力、智能化、集成化、多余度方向發(fā)展,具有良好的應(yīng)用前景。
電靜液作動(dòng)器是電氣和液壓聯(lián)合一體的伺服作動(dòng)器。它綜合了電氣控制、液壓傳動(dòng)及控制兩者的優(yōu)點(diǎn),電氣部分一般用作系統(tǒng)信號(hào)接收、放大變換、傳輸、反饋控制;液壓部分則作為功率轉(zhuǎn)換、放大和傳動(dòng)的執(zhí)行部件。目前在國(guó)外多種機(jī)型中都有應(yīng)用,如:B-2、AF-22、JAS-39、EFA-2000、F/A-18E/F、F-35、M346、T50、NH90等,國(guó)內(nèi)多型戰(zhàn)機(jī)也有應(yīng)用,逐漸使得飛機(jī)向著“多電飛機(jī)”方向發(fā)展,根據(jù)目前的發(fā)展方向,逐漸向“全電飛機(jī)”的目標(biāo)邁進(jìn)。
目前,AMESim軟件是國(guó)內(nèi)外流行的液壓系統(tǒng)計(jì)算機(jī)仿真軟件,通過(guò)此軟件,能夠進(jìn)行液壓傳動(dòng)系統(tǒng)的靜/動(dòng)態(tài)特性仿真,AMESim可以解決絕大多數(shù)液壓工程的問(wèn)題,它提供了從流體力學(xué)到液壓傳動(dòng)、直到伺服控制的完整液壓解決方案。采用基于物理模型的圖形化建模方式,使得用戶可以從繁瑣的數(shù)學(xué)建模中解放出來(lái),從而專(zhuān)注于物理系統(tǒng)本身的設(shè)計(jì)。
筆者主要闡述了新型電靜液作動(dòng)器的系統(tǒng)結(jié)構(gòu)與原理,對(duì)電靜液作動(dòng)器進(jìn)行了理論建模。同時(shí),考慮空中加油過(guò)程中的氣動(dòng)負(fù)載,對(duì)作動(dòng)系統(tǒng)的節(jié)流系數(shù)進(jìn)行了優(yōu)化設(shè)計(jì)。AMESim仿真結(jié)果表明,電靜液作動(dòng)器可以精確跟蹤輸入信號(hào),舵面偏轉(zhuǎn)誤差滿足工程應(yīng)用的容差限。
1 EHA的系統(tǒng)組成和工作原理
電靜液作動(dòng)器(Electro Hydrostatic Actuator,EHA)的原理模型如圖1所示[1-4],采用AMESim液壓仿真軟件對(duì)EHA進(jìn)行建模,在EHA中,集成了很多液壓附件,用以完成補(bǔ)油、過(guò)壓保護(hù)和工作模式選擇等功能。具體包括控制器、高性能直流無(wú)刷電機(jī)(Brushless Direct Current Motor,BLDCM)、雙向柱塞泵、蓄壓器、單向閥、油濾及子系統(tǒng)、安全閥、作動(dòng)筒、壓力傳感器、負(fù)載位移傳感器和旋轉(zhuǎn)變壓器(速度傳感器)。其中,電機(jī)電壓為DC 250 V,轉(zhuǎn)速不超過(guò)4000 r/min,作動(dòng)筒行程不超過(guò)100 mm,最大運(yùn)動(dòng)速度不超過(guò)100 mm/s,最大靜態(tài)輸出力不超過(guò)100 kN。
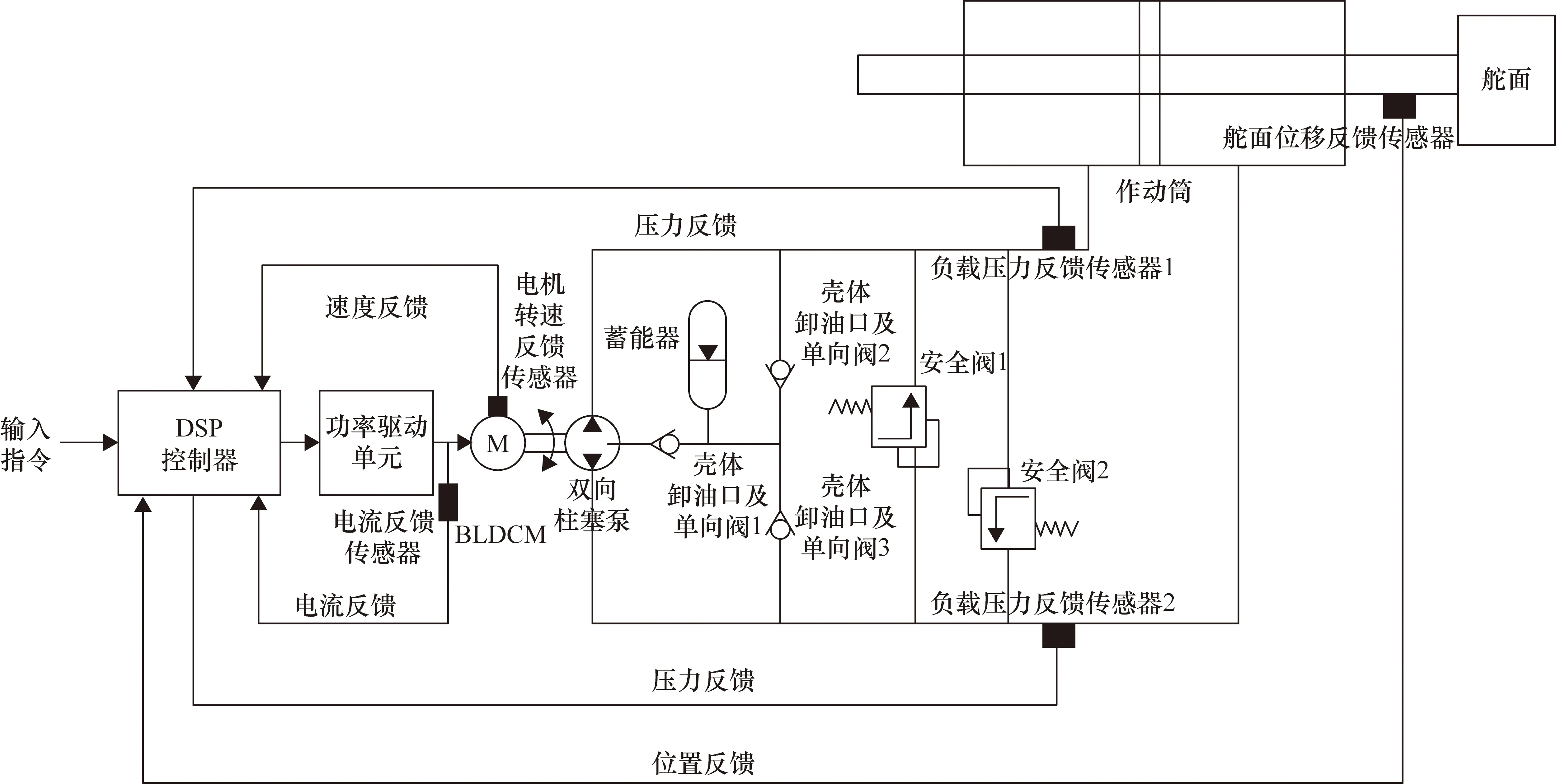
圖1 EHA系統(tǒng)組成與原理圖
DSP控制器接受上游飛控計(jì)算機(jī)的輸入指令信號(hào),傳遞給功率驅(qū)動(dòng)單元,驅(qū)動(dòng)直流電機(jī),電機(jī)輸出轉(zhuǎn)速帶動(dòng)柱塞泵旋轉(zhuǎn),柱塞泵輸出高壓油到作動(dòng)筒中,最終實(shí)現(xiàn)對(duì)舵面負(fù)載的驅(qū)動(dòng)。蓄壓器的作用是當(dāng)系統(tǒng)壓力低于工作壓力時(shí),對(duì)系統(tǒng)進(jìn)行補(bǔ)油,防止氣穴現(xiàn)象發(fā)生,安全活門(mén)是防止柱塞泵和作動(dòng)筒中產(chǎn)生過(guò)高的壓力。
2 EHA的AMESim建模與仿真
2.1 EHA建模
根據(jù)圖1所示的EHA功能示意圖,構(gòu)建功能級(jí)EHA模型[5-7],如圖2所示。
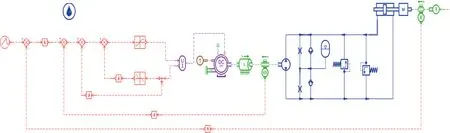
圖2 AMESim中的EHA系統(tǒng)模型
模型包含有:雙向液壓泵、蓄壓器、安全閥、直流電機(jī)、單向閥、節(jié)流孔、作動(dòng)筒、舵面、位移傳感器、壓力傳感器等。
2.2 主要性能指標(biāo)
EHA主要性能指標(biāo)如下:
① 電機(jī)功率:7.5 kW;
② 電機(jī)供電電壓:DC 250 V;
③ 電機(jī)最高轉(zhuǎn)速:4000 r/min;
④ 作動(dòng)器行程:100 mm[8];
⑤ 作動(dòng)器最大速度:100 mm/s[9];
⑥ 作動(dòng)器最大靜態(tài)輸出力:100 kN;
⑦ 系統(tǒng)工作壓力:21 MPa;
⑧ 系統(tǒng)最大流量:33.33 L/min。
仿真所用詳細(xì)參數(shù)如表1所示[10]。
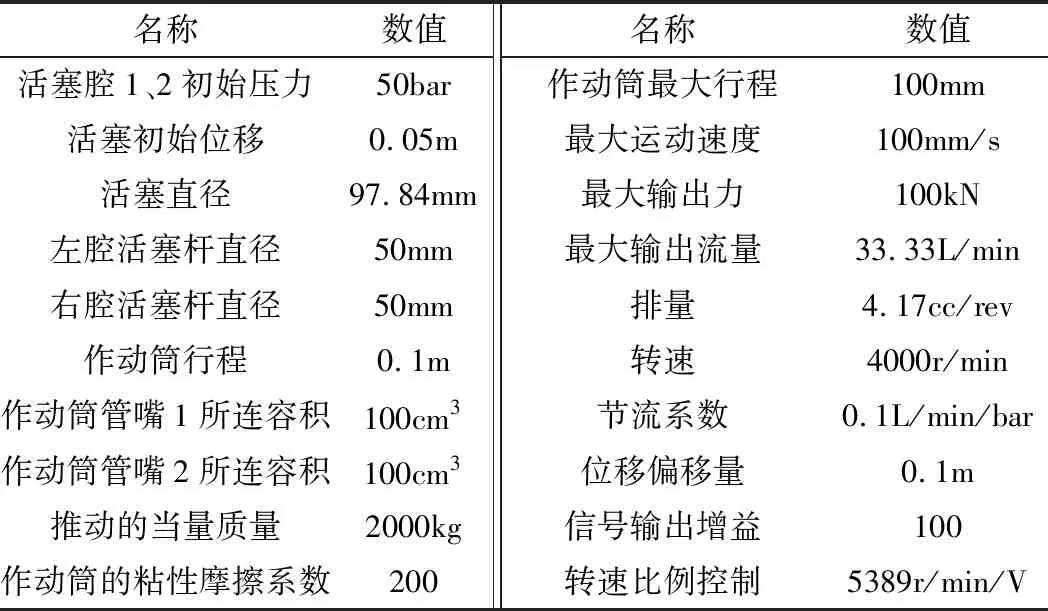
表1 功能級(jí)EHA模型元件參數(shù)表
3 仿真結(jié)果及分析
3.1 EHA系統(tǒng)的仿真結(jié)果分析
當(dāng)輸入位移指令為5 V時(shí)(0.1 V對(duì)應(yīng)1 mm)[11-12],氣動(dòng)負(fù)載為20000 N,節(jié)流系數(shù)為0.5 L/min/bar時(shí),舵面的輸出位移曲線如圖3所示。
圖3是節(jié)流系數(shù)為0.5 L/min/bar時(shí),舵面輸出位移的仿真圖,由圖3可看出,0~0.5 s時(shí)沒(méi)有位移的輸入與輸出,在第5 s加入20000 N的氣動(dòng)負(fù)載時(shí),舵面位移曲線有明顯的波動(dòng),并且穩(wěn)定后舵面輸出位移的穩(wěn)態(tài)誤差較大,根據(jù)此現(xiàn)象,將節(jié)流系數(shù)縮小至0.1 L/min/bar時(shí)再進(jìn)行仿真分析,結(jié)果如圖4所示。

圖3 節(jié)流系數(shù)為0.5 L/min/bar時(shí)的位移偏移量
圖4是節(jié)流系數(shù)為0.1L/min/bar時(shí),舵面輸出位移的仿真圖。由圖4可看出,0~0.5 s時(shí)沒(méi)有位移的輸入與輸出,在第5 s加入一個(gè)20000 N的氣動(dòng)負(fù)載時(shí),對(duì)舵面的位移有較小的擾動(dòng),此時(shí)舵面位移的穩(wěn)態(tài)誤差較小,但也沒(méi)完全消除,鑒于此,再將節(jié)流系數(shù)縮小至0.01 L/min/bar進(jìn)行仿真分析,結(jié)果如圖5所示。
圖5是節(jié)流系數(shù)為0.01 L/min/bar時(shí),舵面輸出位移的仿真圖,由圖5可看出,0~0.5 s時(shí)沒(méi)有位移以及氣動(dòng)負(fù)載的輸入,在第5 s時(shí)加入一個(gè)20000 N的負(fù)載力。從仿真圖顯示舵面輸出位移的擾動(dòng)非常小,最終穩(wěn)定后輸出位移的穩(wěn)態(tài)誤差較圖4更小,基本滿足目標(biāo)值0.05 m。
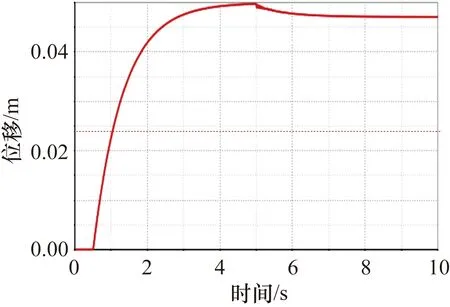
圖4 節(jié)流系數(shù)為0.1 L/min/bar時(shí)的位移偏差量
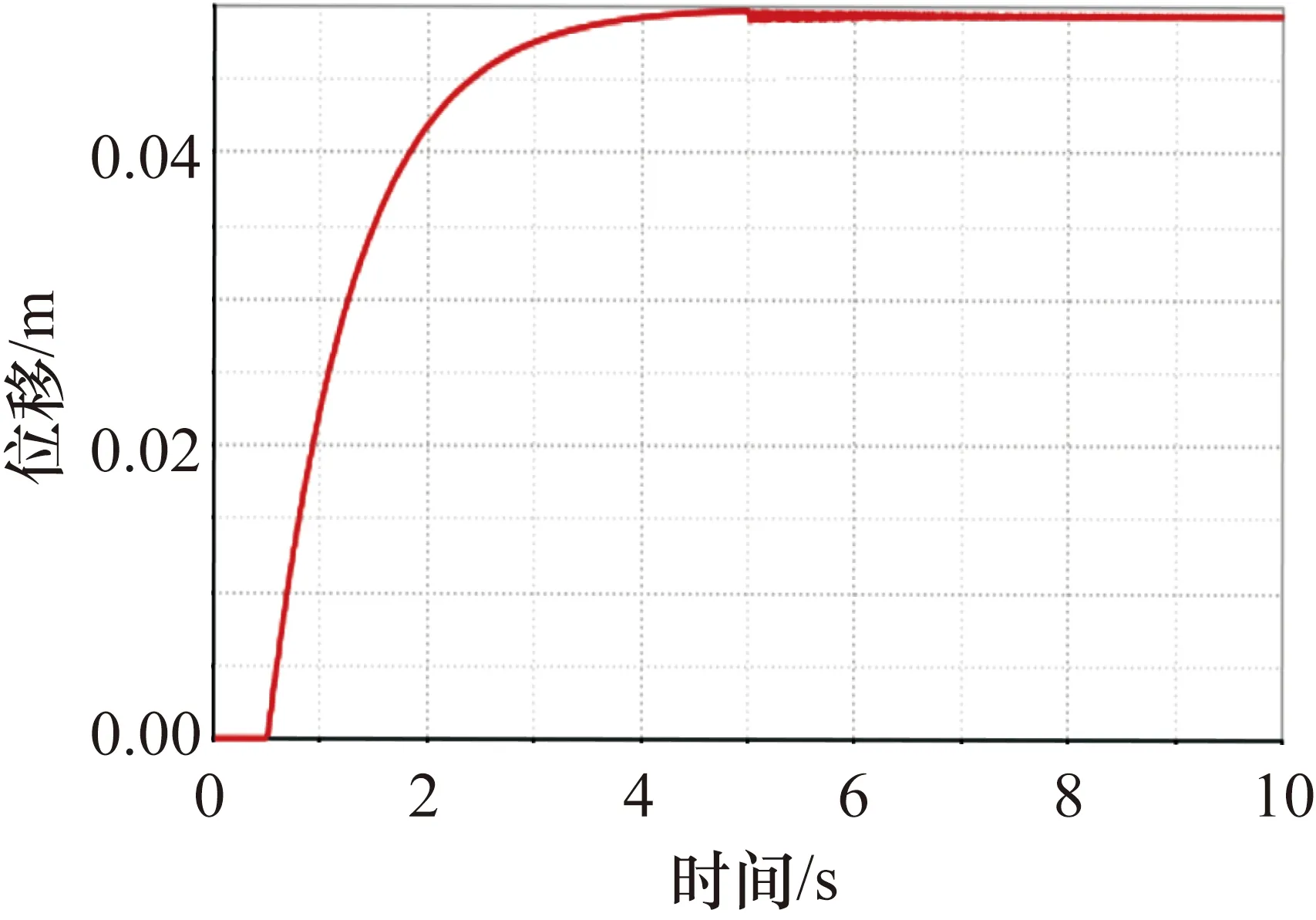
圖5 節(jié)流系數(shù)為0.01 L/min/bar時(shí)的位移偏差量
從以上仿真曲線圖可看出,節(jié)流系數(shù)越小,舵面位移的穩(wěn)態(tài)誤差越小,下面進(jìn)行節(jié)流孔流量的公式分析。
3.2 基于AMESim的節(jié)流孔公式分析
液體流經(jīng)節(jié)流孔的模型如圖6所示,AMESim中的節(jié)流孔模型如圖7所示。通過(guò)液體流過(guò)縫隙來(lái)控制壓力和流量,以此來(lái)達(dá)到調(diào)壓或調(diào)速的目的,本節(jié)通過(guò)研究液壓油在節(jié)流孔的流動(dòng)規(guī)律,進(jìn)而合理分析舵面輸出位移的穩(wěn)態(tài)誤差,從而提高飛機(jī)姿態(tài)的穩(wěn)定性,對(duì)于空中加油意義重大。

圖6 液體流過(guò)節(jié)流孔的示意圖

圖7 AMESim中的節(jié)流孔模型
節(jié)流孔是AMESim軟件中液壓模塊的元器件,通過(guò)調(diào)節(jié)孔口的大小,進(jìn)而控制流過(guò)孔的液壓流量,從而實(shí)現(xiàn)限流的作用。其原理為:流體在管道中流動(dòng)時(shí),由于孔板的局部阻力,使得流體的壓力降低,能量損耗,該現(xiàn)象在熱力學(xué)上稱(chēng)為節(jié)流現(xiàn)象,調(diào)節(jié)節(jié)流孔的方式比采用調(diào)節(jié)閥要簡(jiǎn)單,但必須得當(dāng),否則液體容易產(chǎn)生汽蝕現(xiàn)象,影響管道的安全運(yùn)行。
在AMESim中節(jié)流口模型的流量公式如下:
(1)
式中,Arest為節(jié)流孔面積;vrest為節(jié)流孔處流速;Avc為縮流斷面面積;vvc為縮流斷面處流速;Cd為流量系數(shù);Q為通過(guò)薄壁孔流量;ρ為液體密度;A1為孔口上游通道斷面面積;A2為孔口下游通道斷面面積;v1為孔口上游流速;v2為孔口下游流速;Pup為孔口上游通道斷面壓力;Pvc為縮流斷面處壓力。
從節(jié)流孔的流量仿真公式可知,當(dāng)通過(guò)圖2 AMESim建立的EHA系統(tǒng)中的節(jié)流孔的流量越大時(shí),從柱塞泵輸出的高壓油量供給舵面的流量就越少,導(dǎo)致輸出的舵面位移偏離目標(biāo)值越大,即所謂的穩(wěn)態(tài)誤差越大;當(dāng)通過(guò)節(jié)流孔的流量越小時(shí),從柱塞泵輸出的高壓油量能最大效率輸送給舵面,驅(qū)動(dòng)舵面的偏轉(zhuǎn),進(jìn)而能最大程度接近目標(biāo)位移值,即穩(wěn)態(tài)誤差越小。
根據(jù)這一分析結(jié)果可知,節(jié)流系數(shù)直接影響舵面輸出位移的穩(wěn)態(tài)誤差,進(jìn)而直接控制飛機(jī)姿態(tài)的變化,節(jié)流流量越小,舵面偏轉(zhuǎn)的穩(wěn)態(tài)誤差越小,姿態(tài)的穩(wěn)定性越高,越有利于空中加油技術(shù)的實(shí)施。
4 結(jié)論
針對(duì)加受油過(guò)程中舵面偏轉(zhuǎn)不精準(zhǔn)問(wèn)題,考慮使用作動(dòng)器來(lái)驅(qū)動(dòng)舵面運(yùn)動(dòng)[13],基于AMESim建立了EHA系統(tǒng)模型,并提出了通過(guò)調(diào)節(jié)EHA中節(jié)流系數(shù)的方法,來(lái)解決舵面輸出位移穩(wěn)態(tài)誤差偏大的問(wèn)題,得到以下結(jié)論:
① 基于AMESim建立的EHA模型原理正確,滿足性能要求,有良好的應(yīng)用價(jià)值[14];
② AMESim軟件功能強(qiáng)大,融合了機(jī)械、液壓、電磁等學(xué)科的系統(tǒng)模型[15],極大地縮短了產(chǎn)品的研發(fā)周期;
③ 能夠極大地減小人力、物力的浪費(fèi),建立起一套完整的液壓仿真模型;
④ 基于AMESim建立的EHA系統(tǒng)功能模型中,節(jié)流孔的流量系數(shù)越小,舵面輸出位移的穩(wěn)態(tài)誤差越小,越接近輸入的目標(biāo)值,進(jìn)而越能精準(zhǔn)控制飛機(jī)的姿態(tài)變化,提高了飛機(jī)的機(jī)動(dòng)性與穩(wěn)定性[16],對(duì)空中加油具有指導(dǎo)性的意義。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
