異構(gòu)作動系統(tǒng)的平穩(wěn)切換控制方法
2021-06-03 08:00:06賈生偉潘彥鵬
測控技術(shù) 2021年5期
胡 驍, 賈生偉, 翟 磊, 潘彥鵬, 李 燁
(北京運(yùn)載火箭技術(shù)研究院,北京 100076)
隨著飛行器對可靠性和經(jīng)濟(jì)性的要求日益提高,異構(gòu)作動系統(tǒng)得到了越來越多的應(yīng)用,該系統(tǒng)由一個液壓作動器(Hydraulic Actuator,HA)和一個電液作動器(Electro-Hydrostatic Actuator,EHA)構(gòu)成[1-6],如圖1所示。由于該作動系統(tǒng)中液壓作動器和電液作動器具有不同的工作原理,導(dǎo)致它們有著不同的效率特性。因此,該作動系統(tǒng)存在著能量綜合管理的難題。
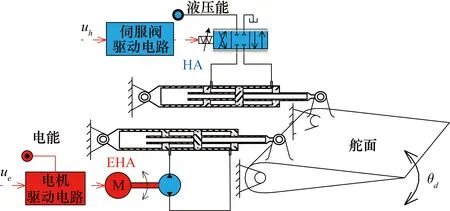
圖1 異構(gòu)作動系統(tǒng)示意圖
在異構(gòu)作動系統(tǒng)的工作模式方面,德國漢堡技術(shù)大學(xué)的Cochoy等人針對非相似余度作動系統(tǒng)提出了一種工作模式:主動/無載(Active/No-Load,A/NL)模式。在該模式下,需要對兩個作動器同時進(jìn)行控制,在正常工作狀態(tài)下,對HA進(jìn)行位置控制,對EHA進(jìn)行零力跟隨控制;在異常情況下,通過模式切換開關(guān),對EHA進(jìn)行位置控制,對HA進(jìn)行旁通控制[7-8]。
在異構(gòu)作動系統(tǒng)的能量特性方面,大部分研究工作主要針對HA和EHA單獨(dú)開展,尚未綜合分析HA和EHA的能量特性,并以此為基礎(chǔ)開展后續(xù)能量綜合管理研究[9-10]。
本文針對上述問題,提出了一種新型的工作模式,使得該系統(tǒng)具備根據(jù)所處工況,自主切換HA、EHA的負(fù)載力/位置控制的能力。對上述工作模式進(jìn)行分析,發(fā)現(xiàn)該模式下,能量特性得到了較大的改善,但是由于HA和EHA的“切換”,導(dǎo)致位置跟蹤存在一定的“抖動”。針對上述問題,本文提出了適應(yīng)性改進(jìn)措施,并對改進(jìn)措施的有效性進(jìn)行了分析與驗(yàn)證。
1 建模與分析
1.1 系統(tǒng)建模
1.1.1 HA建模
HA主要由恒壓源、控制器、伺服閥和液壓缸組成[11],如圖2所示。恒壓源為HA提供液壓動力。控制器的輸入信號為位移指令信號和位移反饋信號,通過控制算法,輸出伺服閥的控制電流信號,調(diào)節(jié)伺服閥的閥開口,進(jìn)而調(diào)節(jié)通過伺服閥的流量。液壓缸與伺服閥相連,將凈流量轉(zhuǎn)化為壓力的變化量,驅(qū)動舵面完成指定的工作。HA模型關(guān)鍵參數(shù)如表1所示。
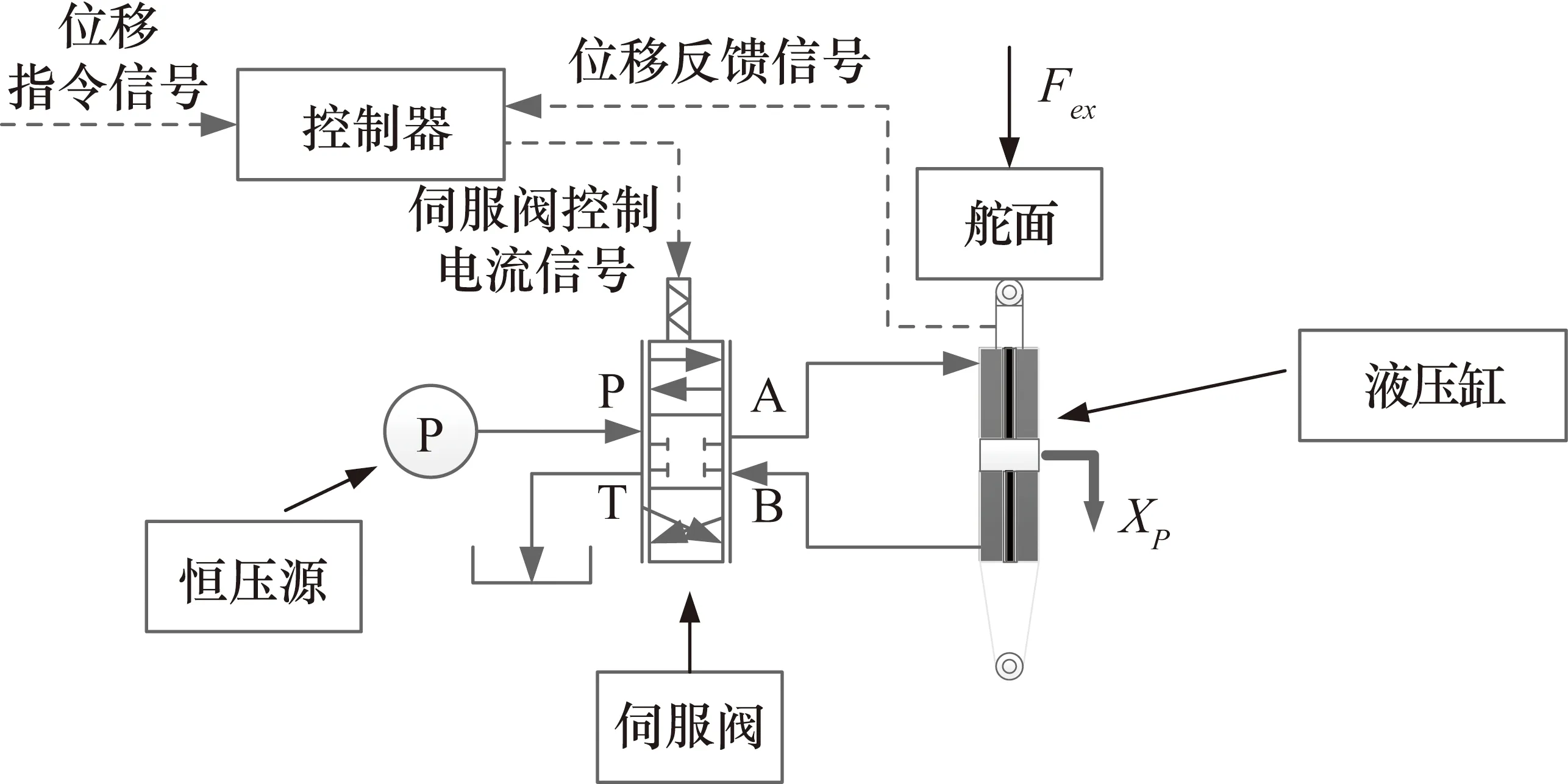
圖2 HA原理示意圖

表1 HA模型關(guān)鍵參數(shù)表
1.1.2 EHA建模
EHA由電機(jī)、液壓泵、液壓缸和電控單元組成[12],如圖3所示。輸入信號與各反饋信號在控制器里按控制律進(jìn)行計算后轉(zhuǎn)變?yōu)殡娍匦盘枺?jīng)驅(qū)動電路放大為功率電信號,由功率電信號驅(qū)動的電機(jī)帶動液壓泵旋轉(zhuǎn),最終由液壓泵輸出的壓力油驅(qū)動舵面進(jìn)行工作。EHA模型關(guān)鍵參數(shù)如表2所示。
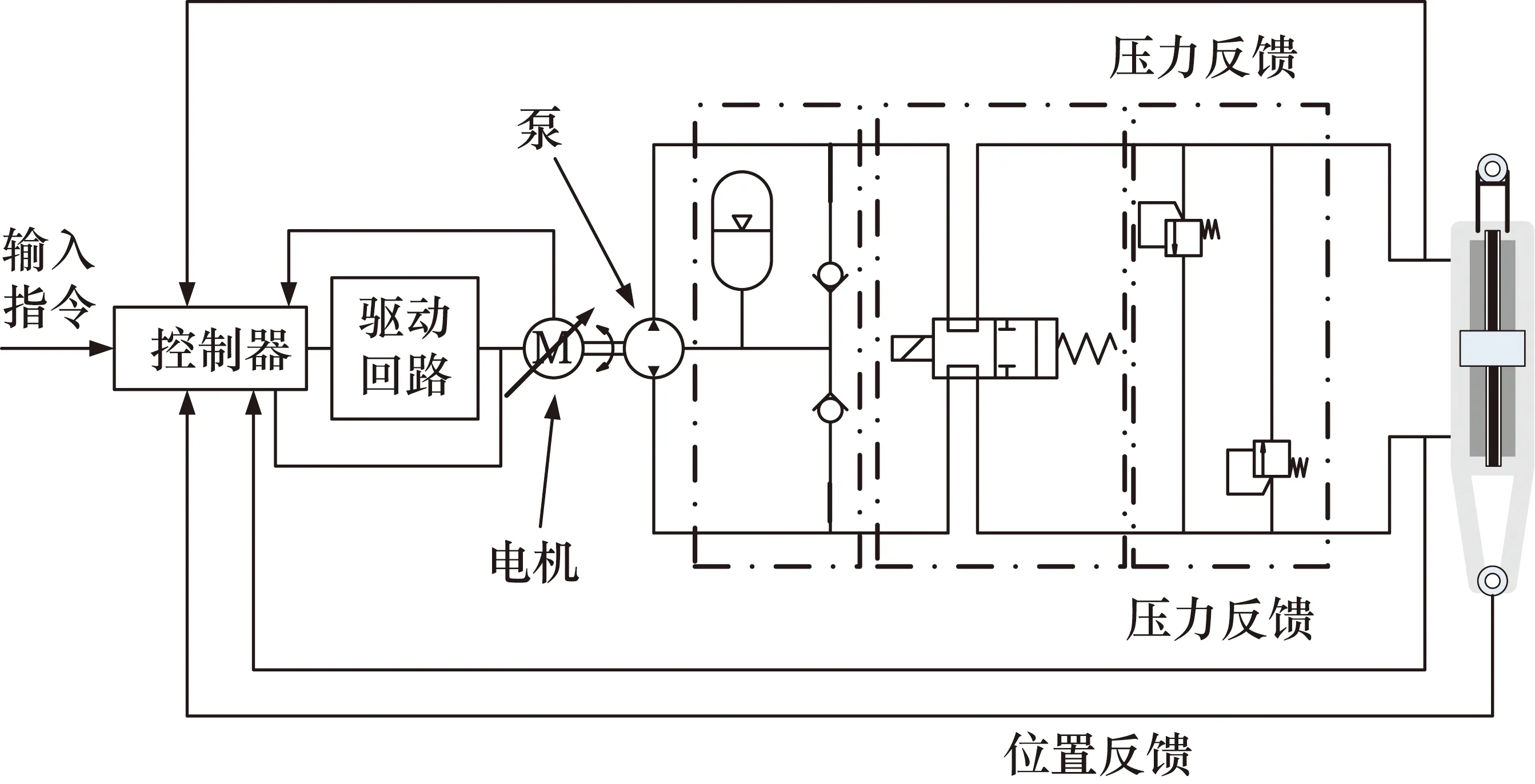
圖3 EHA原理示意圖

表2 關(guān)鍵參數(shù)表
1.2 效率特性
1.2.1 效率定義
本文中作動器效率的定義是,穩(wěn)態(tài)時輸出功率與輸入功率的比值:
(1)
式中,η為作動器效率;Pout為作動器的輸出功率;Pin為作動器的輸入功率。
1.2.2 工作點(diǎn)的設(shè)定
由1.1中作動器的參數(shù)可知,HA與EHA的最大負(fù)載力為45000 N,最大速度為100 mm/s,為了盡可能準(zhǔn)確地得到HA與EHA的效率特性,應(yīng)在計算成本允許的條件下,盡可能多地設(shè)定工作點(diǎn),與此同時,考慮到速度在零值附件變化較為劇烈,因此設(shè)計以下工作點(diǎn)選取方案。
① 考慮速度v在0~2 mm/s之間,每隔0.5 mm/s設(shè)置一個工作點(diǎn),在2~100 mm/s之間,每隔2 mm/s設(shè)置一個工作點(diǎn);
② 考慮負(fù)載力F在0~30000 N之間,每隔800 N設(shè)置一個工作點(diǎn)。
1.2.3 Matlab/Simulink與AMESim聯(lián)合仿真
綜合考慮Matlab/Simulink與AMESim在數(shù)學(xué)仿真中的優(yōu)勢,設(shè)計以下仿真策略:在Matlab/Simulink中完成工作點(diǎn)的設(shè)定以及數(shù)據(jù)記錄的功能,在AMESim中完成HA與EHA的仿真功能,如圖4所示。
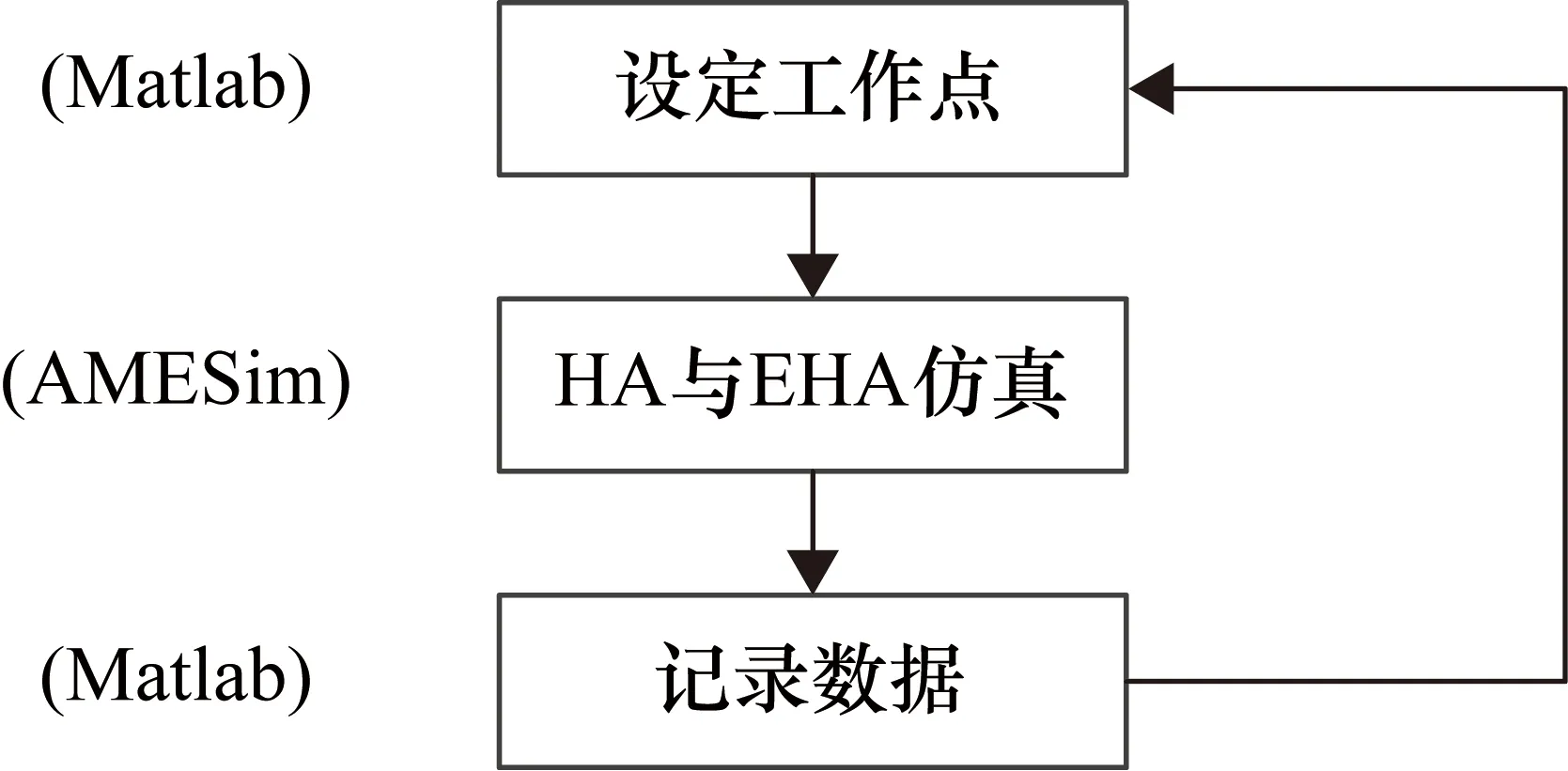
圖4 聯(lián)合仿真示意
1.2.4 仿真結(jié)果與分析
在給定參數(shù)、給定工作點(diǎn)的條件下,HA和EHA的效率特性如圖5、圖6所示。
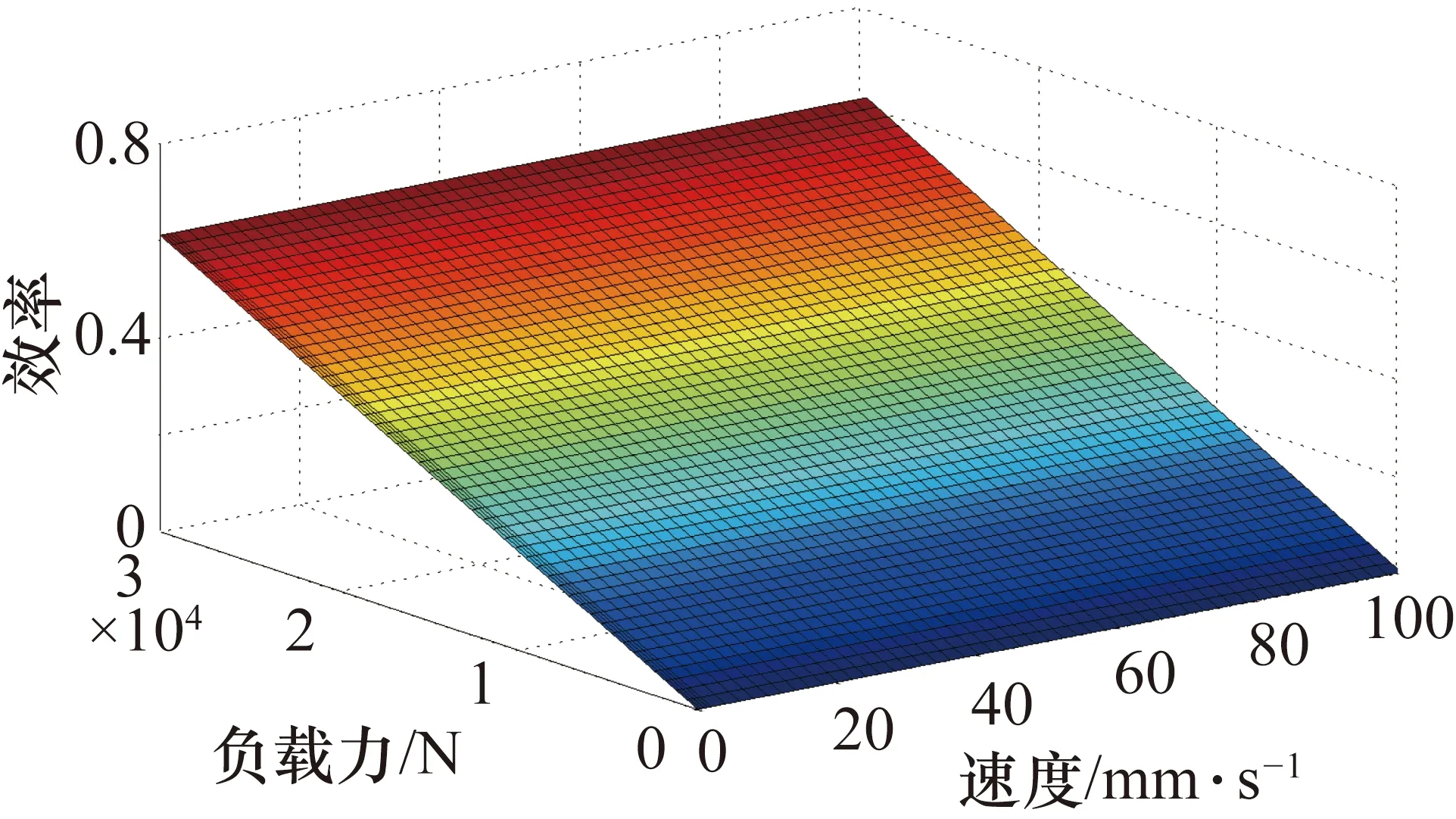
圖5 HA效率特性示意圖

圖6 EHA效率特性示意圖
圖7是HA與EHA效率的對比示意圖,其中紅色區(qū)域表明,在該區(qū)域內(nèi),EHA的效率高于HA的效率;藍(lán)色區(qū)域表明,在該區(qū)域內(nèi),HA的效率高于EHA的效率。從7圖中不難發(fā)現(xiàn),在大多數(shù)工況下,EHA的效率均高于HA的效率,但當(dāng)負(fù)載力大于35000 N時,HA的效率高于EHA的效率。
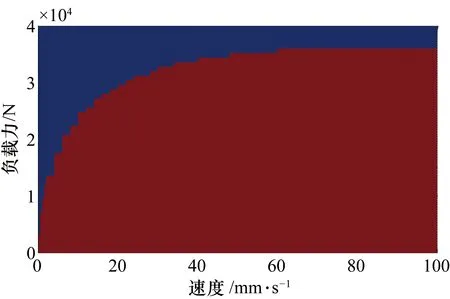
圖7 HA與EHA效率對比示意圖
2 能量管理策略
2.1 基于切換機(jī)制的能量綜合管理策略
以活塞桿速度為X軸,以負(fù)載力為Y軸,確定異構(gòu)作動系統(tǒng)的四象限工作模式,如圖8所示。當(dāng)作動系統(tǒng)處于一、三象限時,作動系統(tǒng)做正功;當(dāng)作動系統(tǒng)處于二、四象限時,作動系統(tǒng)做負(fù)功[13-17]。
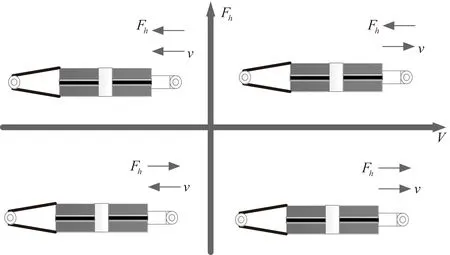
圖8 異構(gòu)作動系統(tǒng)四象限工況示意圖
能量綜合管理策略的核心思想是:利用HA和EHA的工作原理,實(shí)現(xiàn)順載工況下的能量回收;利用HA和EHA的效率特性,以“誰效率高,誰優(yōu)先用”為切換原則,實(shí)現(xiàn)最小化能量消耗。具體說明如下。
① 檢測作動系統(tǒng)的順載/逆載工況,若是順載工況,執(zhí)行②,若是逆載工況,執(zhí)行③;
② 若處于順載工況,充分利用EHA的電機(jī)特性,實(shí)現(xiàn)能量回收,即EHA工作,HA旁通;
③ 若處于逆載工況,充分利用HA和EHA的效率特性,優(yōu)先使用EHA,當(dāng)且僅當(dāng)滿足圖6的負(fù)載力切換條件時,使用HA。
對于異構(gòu)作動系統(tǒng)而言,在不考慮故障的情況下,存在3種工作模式,分別是HA單獨(dú)工作(定義其為模式1)、EHA單獨(dú)工作(定義其為模式2)和本文提出的全新工作模式(定義其為模式3),以下通過仿真的方法,對這3種工作模式進(jìn)行分析。
2.2 仿真結(jié)果分析
假設(shè)異構(gòu)作動系統(tǒng)的位移指令和負(fù)載力指令如圖9所示。

圖9 指令信號示意圖
2.2.1 模式1仿真結(jié)果分析
在Matlab/Simulink的控制器中設(shè)定異構(gòu)作動系統(tǒng)在模式1下工作,仿真結(jié)果如圖10所示。
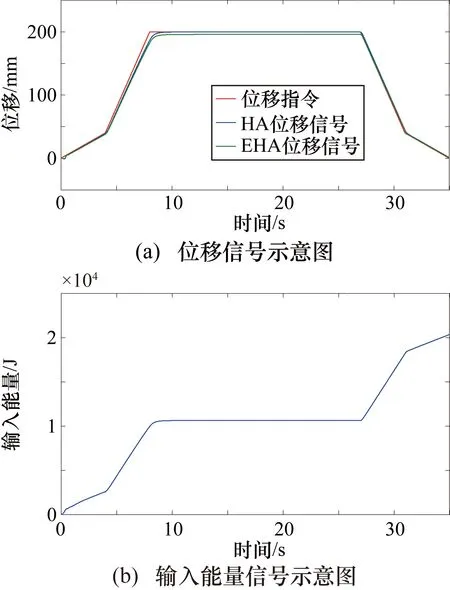
圖10 模式1仿真結(jié)果示意圖
2.2.2 模式2仿真結(jié)果分析
在Matlab/Simulink的控制器中設(shè)定異構(gòu)作動系統(tǒng)在模式2下工作,仿真結(jié)果如圖11所示。
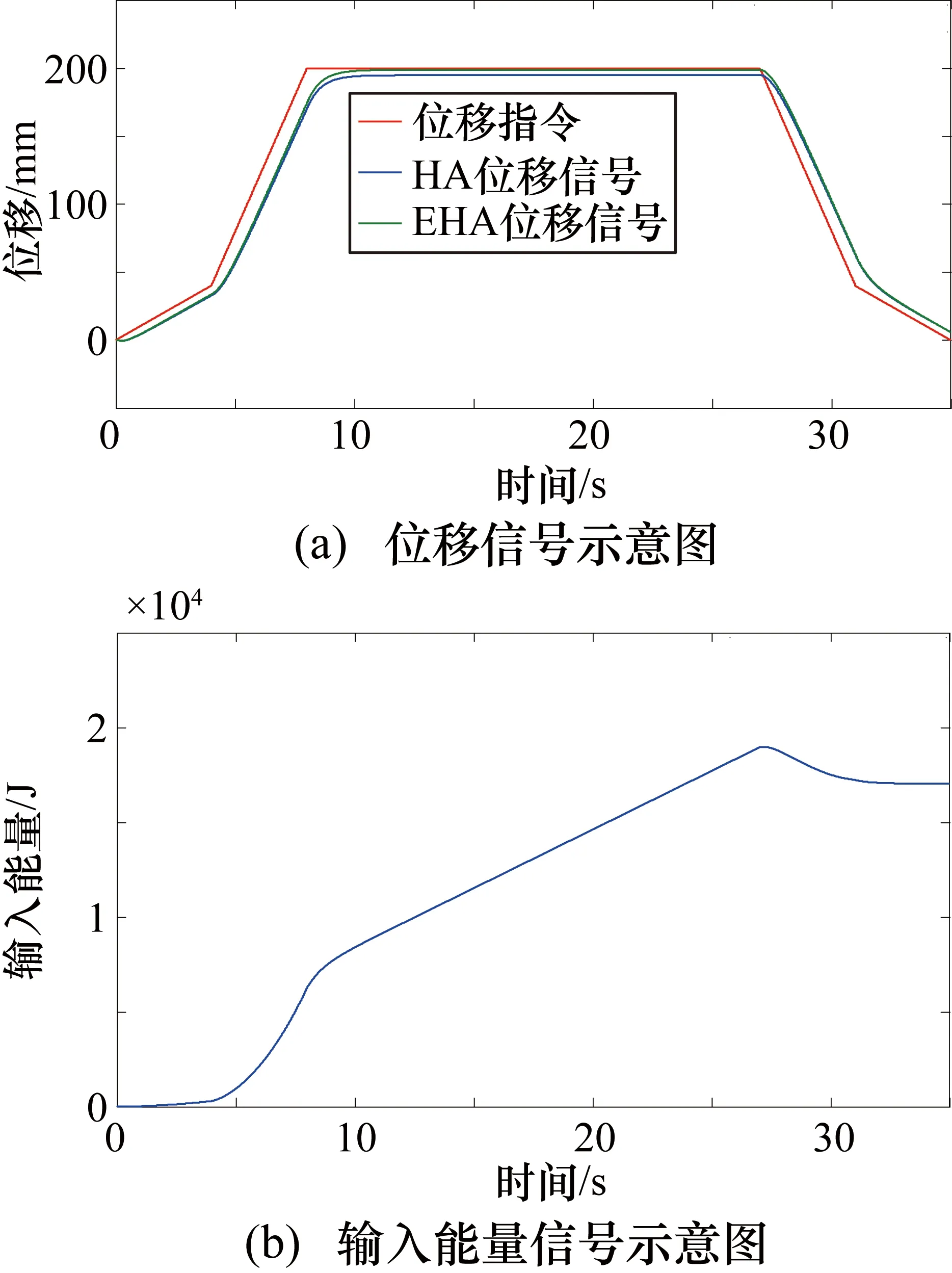
圖11 模式2仿真結(jié)果示意圖
2.2.3 模式3仿真結(jié)果分析
在Matlab/Simulink的控制器中設(shè)定異構(gòu)作動系統(tǒng)在模式3下工作,仿真結(jié)果如圖12所示。
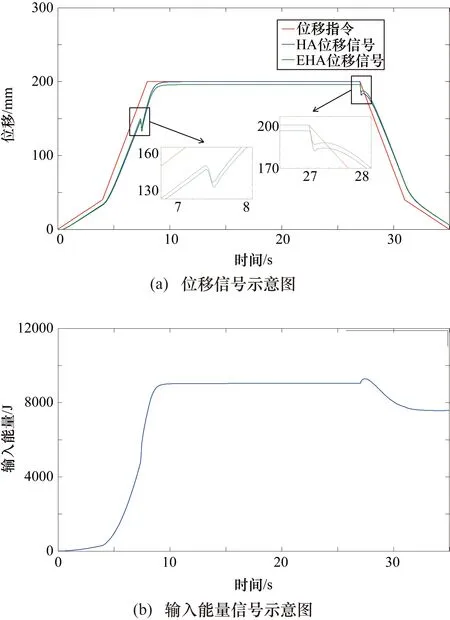
圖12 模式3仿真結(jié)果示意圖
從仿真結(jié)果不難發(fā)現(xiàn),在輸入能量方面,模式3較模式1和模式2有明顯的優(yōu)勢,模式3輸入能量僅為7570 J,模式1輸入能量為20300 J,模式2輸入能量為17100 J;在位移跟蹤曲線方面,模式3較模式1和模式2有明顯的劣勢,在7.3 s時,模式3中異構(gòu)作動系統(tǒng)發(fā)生了從狀態(tài)1(EHA工作)到狀態(tài)2(HA工作)的切換,位移跟蹤曲線出現(xiàn)了明顯的“抖動”現(xiàn)象,在27 s時,模式3中異構(gòu)作動系統(tǒng)發(fā)生了從狀態(tài)2到狀態(tài)1的切換,位移跟蹤曲線也出現(xiàn)了明顯的“抖動”現(xiàn)象。
2.3 “抖動”原因分析
以狀態(tài)1到狀態(tài)2的切換為例,理想的切換場景如下。
① 切換次數(shù)唯一:發(fā)生切換前,有且僅有EHA工作;發(fā)生切換后,有且僅有HA工作;
② 平穩(wěn)接管負(fù)載:發(fā)生切換前后,作動系統(tǒng)的輸出力無變化,即HA “無偏差”地接替EHA進(jìn)行工作。
2.3.1 切換次數(shù)分析
圖13是異構(gòu)作動系統(tǒng)的選通信號示意圖,其中,“0”表示處于工作狀態(tài),“1”表示處于旁通狀態(tài)。從圖13中不難發(fā)現(xiàn),在7.3~7.5 s內(nèi),HA和EHA的選通信號切換了7次,說明異構(gòu)作動系統(tǒng)在狀態(tài)1和狀態(tài)2之間切換了7次,這對于異構(gòu)作動系統(tǒng)而言,是難以接受的。
2.3.2 平穩(wěn)接管分析
圖14是模式3的輸出力示意圖。從圖14(a)中不難發(fā)現(xiàn),在7.3 s附近,異構(gòu)作動系統(tǒng)工作于逆載狀態(tài),當(dāng)輸出力首次達(dá)到35000 N時,該作動系統(tǒng)從狀態(tài)1切換至狀態(tài)2,但由于切換的瞬間,輸出力又小于35000 N,該作動系統(tǒng)又從狀態(tài)2切換至狀態(tài)1,如此反復(fù),直至輸出力穩(wěn)定大于35000 N,因此,該作動系統(tǒng)的選通信號如圖13所示。從圖14(b)中不難發(fā)現(xiàn),在7.3 s和27 s左右,異構(gòu)作動系統(tǒng)發(fā)生了2次“硬性”切換,無論是HA的輸出力還是EHA的輸出力均發(fā)生大幅度的跳變。

圖13 選通信號示意圖
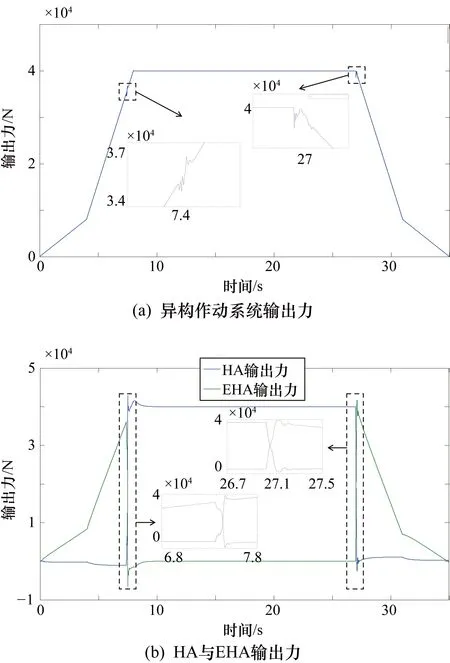
圖14 模式3輸出力示意圖
定義輸出力誤差如下:
(2)
式中,F(xiàn)actual為實(shí)際輸出力;Fideal為理論輸出力;tstart為起始時間;tend為終止時間。
根據(jù)式(2)計算圖14(a)中的輸出力誤差,ErrF約為1000 N。
3 平穩(wěn)控制方法
3.1 解決思路
3.1.1 “頻繁”切換的解決思路
“頻繁”切換現(xiàn)象產(chǎn)生的原因在第2節(jié)中已經(jīng)說明,是由于在切換的瞬間,異構(gòu)作動系統(tǒng)的輸出力在切換值(35000 N)附近來回變化,導(dǎo)致切換被“頻繁”觸發(fā)。
為了解決“頻繁”切換的問題,本文提出一種方法:設(shè)置切換最小時間間隔,即當(dāng)切換發(fā)生時,記錄當(dāng)前的時間,當(dāng)下一次切換發(fā)生時,首先判斷兩次切換的時間間隔是否大于最小時間間隔,如果大于最小時間間隔,則允許這次切換發(fā)生,如果小于最小時間間隔,則“屏蔽”這次切換,具體流程如圖15所示。
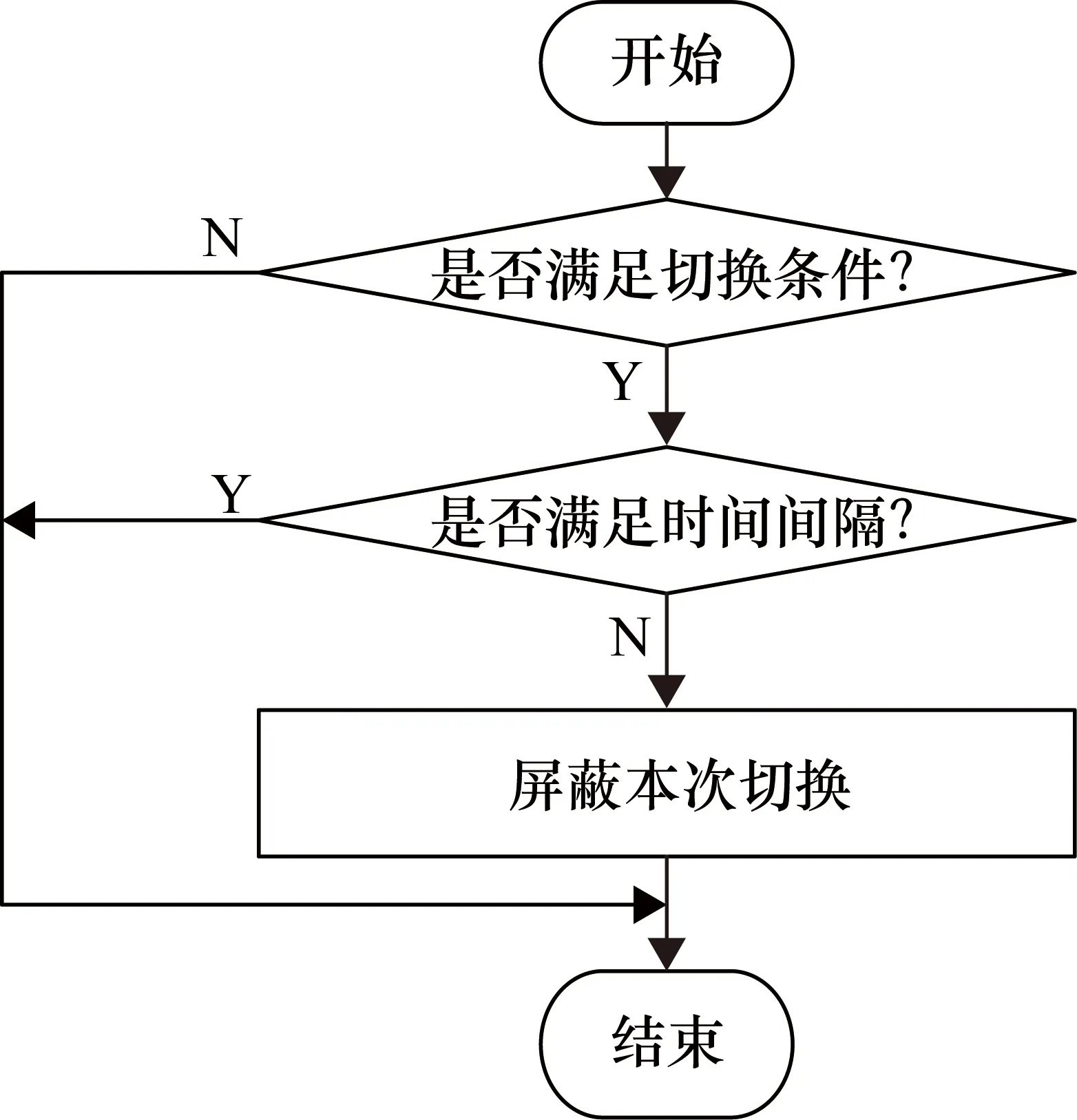
圖15 第1步改進(jìn)后控制器控制流程圖
3.1.2 輸出力跳變的解決思路
為了實(shí)現(xiàn)“平滑”的過渡,本文對模式3做進(jìn)一步的改進(jìn),提出一種新的切換思想:以EHA切換至HA為例,當(dāng)滿足切換條件時,將異構(gòu)作動系統(tǒng)從狀態(tài)1切換至狀態(tài)3,檢測EHA上的輸出力,當(dāng)EHA上輸出力較小時,再將該作動系統(tǒng)從狀態(tài)3切換至狀態(tài)2,這是一種“軟性”的切換,如圖16所示。
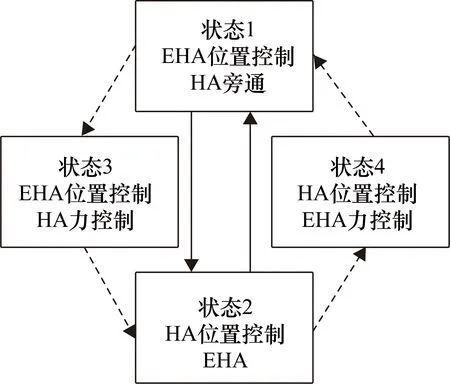
圖16 第2步改進(jìn)后切換思路示意圖
3.2 仿真結(jié)果
圖17是作動系統(tǒng)的輸出力示意圖,根據(jù)式(2),ErrF約為300 N,較改進(jìn)前的模式3下降了70%。
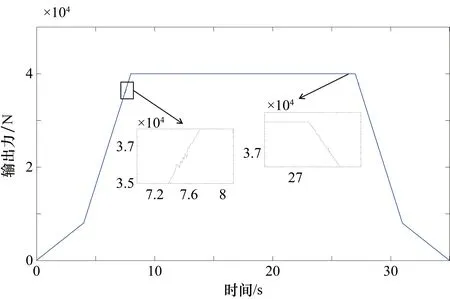
圖17 異構(gòu)作動系統(tǒng)輸出力
圖18是異構(gòu)作動系統(tǒng)的位移信號示意圖,從圖中不難發(fā)現(xiàn),由于模式3-改進(jìn)型采用了“軟性”切換,在7.3 s附近和27 s附近位移跟蹤曲線較模式3有了很大的改善。
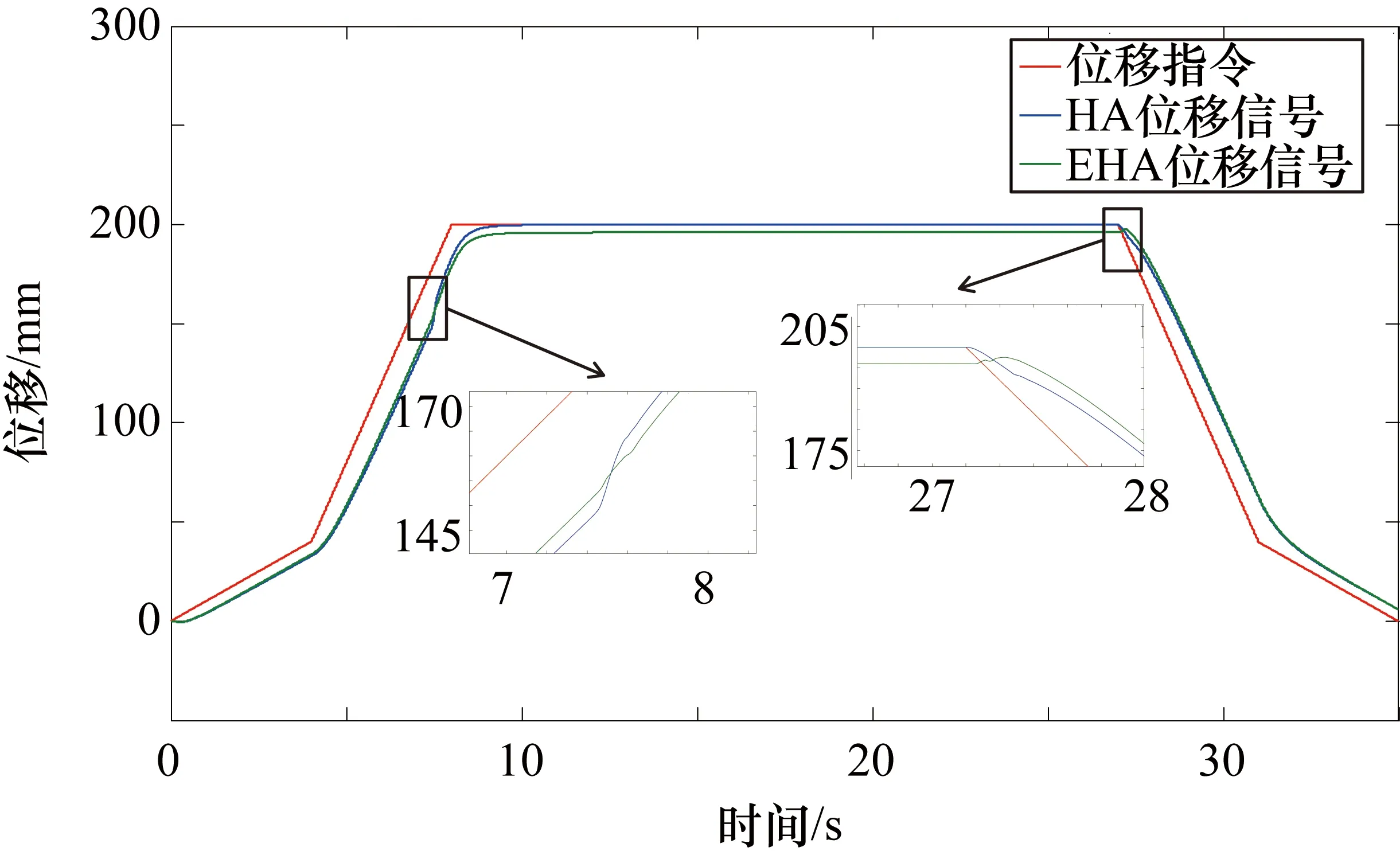
圖18 異構(gòu)作動系統(tǒng)的位移信號示意圖
圖19是3種不同模式的輸入能量示意圖,從圖中不難發(fā)現(xiàn),模式3-改進(jìn)型與模式1和模式2相比,具有明顯的優(yōu)勢,且保證了異構(gòu)作動系統(tǒng)的平穩(wěn)性,是最優(yōu)的方案。
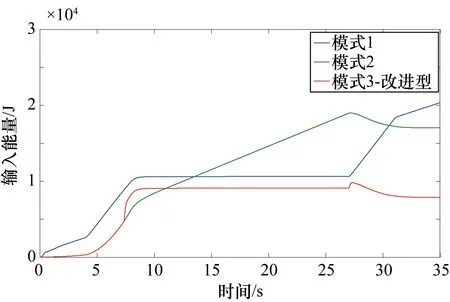
圖19 3種不同模式的輸入能量示意圖
4 結(jié)論
本文對HA和EHA組成的異構(gòu)作動系統(tǒng)進(jìn)行研究,得到結(jié)論如下。
① 提出了一種新型的能量管理策略,選取位移跟蹤特性和能耗特性為評價指標(biāo),分析表明:新型的能量管理策略在能耗特性方面有較大的優(yōu)勢,但在位移跟蹤曲線上出現(xiàn)了“抖動”的現(xiàn)象,即在控制平穩(wěn)性方面,表現(xiàn)出一定的不足;
② 造成“抖動”的主要原因包括“頻繁”切換和輸出力的大幅度跳變;
③ 針對“頻繁”切換問題,提出了設(shè)置最小切換間隔的方法,仿真結(jié)果表明,該方法可以很好地解決“頻繁”切換的問題,但對模式3中位移跟蹤曲線出現(xiàn)的“抖動”現(xiàn)象并未起到明顯的改善作用;
④ 針對輸出力大幅度跳變問題,提出了“軟性”切換的方法,仿真結(jié)果表明,該方法可以很好地解決位移跟蹤曲線出現(xiàn)的“抖動”現(xiàn)象;
⑤ 綜合考慮能耗特性和控制平穩(wěn)性,改進(jìn)后的模式3是異構(gòu)作動系統(tǒng)的最優(yōu)的工作模式。
猜你喜歡
《學(xué)習(xí)方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數(shù)學(xué)小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
甘肅教育(2020年14期)2020-09-11 07:57:42
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年5期)2020-06-02 09:19:08
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
商周刊(2017年9期)2017-08-22 02:57:49
中國共青團(tuán)(2015年7期)2015-12-17 01:24:38
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛(wèi)生(2014年11期)2014-11-12 13:11:32
中學(xué)生數(shù)理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44
