相控陣二次雷達的多任務協同工作效率評價方法研究
2021-06-03 06:12:18四川九洲電器集團有限責任公司
電子世界 2021年9期
四川九洲電器集團有限責任公司 夏 明
四川九洲空管科技有限責任公司 彭杰文
在相控陣二次雷達的多任務協同工作時,我們需要根據項目實際應用環境,設計相應的軟件算法來滿足用戶的需求。然而在設計算法的過程中,我們往往缺乏對其進行量化的評價。為了規范和優化我們的多任務協同調度算法設計,本文提出一種多任務協調調度效率評價方法,并對該方法進行了說明和介紹。通過理論分析和實際應用介紹,驗證了該方法的可行性和合理性。
相控陣二次雷達經過不斷的迭代發展,已經具備區域分級監視、目標牽引識別、補盲跟蹤等多種任務協同工作能力。為了能夠高效的利用相控陣二次雷達進行工作,我們常常根據二次雷達應用平臺和場景的實際情況去設計多任務協同調度算法。假如我們設計了多種任務調度算法均能滿足功能性能要求,我們如何去選擇更有效的算法,這需要我們對算法的效率進行合理的評價。本文主要討論相控陣二次雷達多任務協同調度效率評價的方法。
1 任務分類及說明
相控陣二次雷達多任務工作一般包括:普通區域監視任務、重點區域監視任務、目標牽引識別任務、補盲跟蹤任務四種。
普通區域監視任務用于滿足用戶掌握周邊普通區域的空情,該任務執行常以周期觸發形式存在,刷新周期較長,優先級一般;
重點區域監視任務用于滿足用戶掌握周邊重點區域的空情,該任務執行常以周期觸發形式存在,刷新周期較短,優先級較高;
目標牽引識別任務用于滿足用戶對某一區域位置上的目標進行身份識別,該任務主要用于配合其他探測設備進行工作,其任務執行常以事件觸發形式存在,優先級最高;
補盲跟蹤任務用于滿足用戶對目標探測信息不連續時進行二次確認,主要起查漏補缺的作用,該任務主要在周期觸發的任務結束后由調度算法自動生成,其任務執行常以事件觸發形式存在,優先級最低。
2 多任務效率評價方法
2.1 參數設置及說明
本文根據相控陣二次雷達常用的任務劃分方式,設定不同任務分值參數。
目標牽引識別任務:sq分;重點區域監視任務:sz1分;普通區域監視任務:sz2分;補盲跟蹤任務:sg分。四種分值的大小關系為sq>sz1>sz2>sg。
本文根據任務劃分及相關條件要求,將相關參數進行標識和說明。
Nq:接收的目標牽引識別任務集合;nq:執行的目標牽引識別任務集合;Tq:目標牽引識別任務完成時間門限;tq:執行的最長目標牽引識別任務完成時間。
Ng:接收的補盲跟蹤任務集合;ng:執行的補盲跟蹤任務集合;Tg:補盲跟蹤任務完成時間門限;tg:執行的最長補盲跟蹤任務完成時間。
Nz1:接收的重點區域監視任務集合;nz1:執行的重點區域監視任務集合;Tz1:重點區域任務周期執行時間門限;tz1:執行的重點區域任務周期。
Nz2:接收的普通區域監視任務集合;nz2:執行的普通區域監視任務集合;Tz2:普通區域任務周期執行時間門限;tz2:執行的普通區域任務周期。
Score:總分值;Tall:二次雷達工作總時間;Tidle:二次雷達的多任務調度空閑時間。
2.2 前提條件
本文提供的方法用于評價的是不同調度算法的優劣,因此必須保證不同算法應用時,除開算法以外的客觀情況保持一致,從而需要滿足以下約束條件:
(1)相同任務二次雷達執行的時間一致;
(2)調度算法執行時間有限,且總時長一致;
(3)周期執行任務在一個周期門限內相同任務最多計算一次分值,超出周期門限不計算分值;
(4)觸發執行任務在完成時間門限內最多計算一次分值,超出時間門限不計算分值。
2.3 評級劃分及條件
本文根據實際工程應用中項目需求是否得到滿足,來將多任務波束調度算法分為4個等級,包括“丟失級”、“基本級”、“優化級”、“可拓展級”。
分級的5個約束條件:
(1)目標牽引識別任務集合完成調度且所有任務完成時間小于等于對應門限;
(2)重點區域監視任務集合完成調度且任務周期執行時間小于等于對應門限;
(3)普通區域監視任務集合完成調度且任務周期執行時間小于等于對應門限;
(4)補盲跟蹤任務集合完成調度且所有任務完成時間小于等于對應門限;
(5)在滿足條件(1)~(4)的基礎上,空閑時間占總時間的比例大于等于30%。
“丟失級”:條件(1)~(3)存在一個或多個無法滿足;
“基本級”:條件(1)~(3)均滿足,條件(4)無法滿足;
“優化級”:條件(1)~(4)均滿足,條件(5)無法滿足;
“可拓展級”:條件(1)~(5)均滿足。
2.4 效率評價方法
(1)方法概述
多任務工作效率評價方法分兩步進行比較:
①計算多任務調度算法的等級,比較不同調度算法的等級,“可拓展級”>“優化級”>“基本級”>“丟失級”;
②在等級相同的情況下,比較多任務調度總分值,總分值越高,工作效率越高。
(2)多任務算法等級判定
①步驟1計算如下:

若條件1~3存在一個或多個無法滿足,則判斷當前多任務調度效率等級為“丟失級”;若條件1~3均能滿足,進入步驟2進行進一步判斷。
②步驟2計算如下:

若條件4無法滿足,則判斷當前多任務調度效率等級為“基本級”;
若條件4能滿足,進入步驟3進行進一步判斷。
③步驟3計算如下:

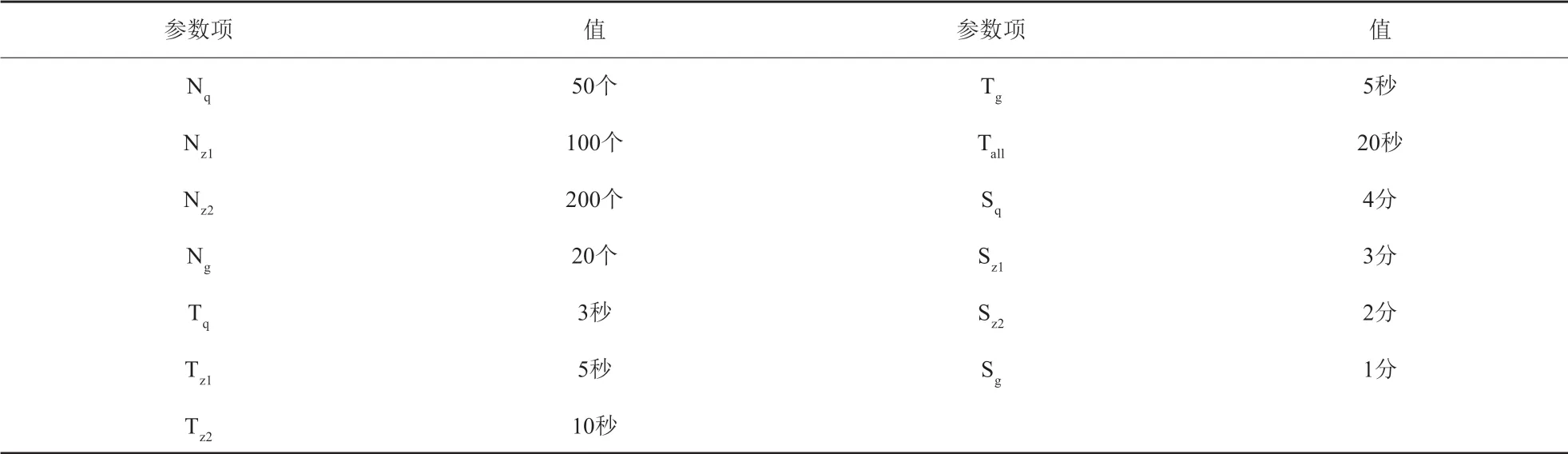
表1 測試環境變量說明

表2 測試數據和方法計算結果統計
若條件5無法滿足,則判斷當前多任務調度效率等級為“優化級”;
若條件5能滿足,則判斷當前多任務調度效率等級為“可拓展級”。
(3)多任務算法得分計算
本節根據“基本級”、“優化級”、“可拓展級”三個等級的得分整合進行得分計算,而“丟失級”等級無法滿足基本需求,因此不討論。
本節的得分計算方法的核心思想有兩點,一是任務的完成情況,二是任務調度空閑時間。
任務完成情況根據實際執行的任務去進行得分計算,得分最多不能超過接收任務的總分值。例如兩個多任務調度算法均為“基本級”級,第一個算法在規定時間內剛好完成了所有接收的目標牽引識別任務,其得分應為第二個算法在規定時間內將所有接收的目標牽引識別任務均完成了兩次,其得分也應該為,而不是。
任務調度空閑時間的多少能夠代表同等評級調度算法的效率高低。例如兩個多任務調度算法均為“可拓展級”級,第一個算法完成所有任務調度后,空閑時間占總時間的50%,第二個算法空閑時間占總時間40%,則第一個算法得分應該更高,代表效率更高。
得分計算公式如下:

公式中Scoreg表示補盲跟蹤任務得分,該得分需根據以下三種情況進行計算:

本節根據公式(1)和公式(2)能夠將“基本級”、“優化級”、“可拓展級”三個等級的得分進行相應的計算,該得分僅應用在相同等級下進行比較。
3 方法應用
在某相控陣二次雷達平臺進行多任務協同調度應用,由不同開發人員分別設計了三套算法來實現用戶需求,根據用戶提出的最大需求,在模擬環境中測試驗證。模擬測試環境的參數,見表1。
基于表1的測試環境,將算法A、B、C進行測試驗證,得到相關測試數據,并根據效率評價方法計算其等級和得分,見表2。
根據表2的計算結果,可以得到算法A和算法B均達到優化級,算法C達到基本級,算法A和B均優于算法C。再根據算法A得分高于算法B,得到算法A優于算法B。
通過模擬用戶的最大需求對某相控陣二次雷達平臺的三種任務調度算法進行測試采樣,然后應用本文提出的評價方法對測試的數據進行計算,得到三種算法的等級和得分,從而能夠讓我們對于算法的優劣有一個很清晰的評價。
結語:本文主要針對相控陣二次雷達多任務協同調度的廣泛應用,提出一種效率評價方法,名為兩層評價法,第一層評價主要基于用戶最大需求的滿足程度來進行分級,第二層評價應用于同級算法進行得分比較。通過該方法的工程應用,可以規范和優化我們的多任務協同調度算法。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
石油瀝青(2021年4期)2021-10-14 08:50:44
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
民生周刊(2012年10期)2012-10-14 09:06:46