一種基于特征組合分類的雜波背景下紅外弱小目標檢測算法*
2021-06-04 04:12:30
艦船電子工程 2021年5期
(中國人民解放軍海軍裝備部裝備項目管理中心 北京 100071)
1 引言
傳統的紅外跟蹤光電設備項目,紅外搜索與跟蹤系統具有周視掃描搜索的特點,可以實時獲取360全景圖像進而得到態勢信息,是全空域實時探測的關鍵。但是,紅外搜索與跟蹤系統獲取的圖像數據量大,背景類型和差異性極大,包含天空云雜波背景、地面建筑物背景、地物自然背景和飛鳥等各種干擾,給目標檢測帶來了極大的困難。
復雜背景下弱小目標檢測的難點在于,紅外小目標尺寸小,亮度往往低于云雜波、人工建筑物的亮度,極易淹沒在背景中,難以通過輪廓和亮度信息完成對目標和干擾雜波的有效分類。為了在雜波背景中檢測弱小目標,業內學者提出了一些方法。Kim[1]等提出了基于目標局部灰度標準差、局部頻率能量等特征信息的分類方法,這類特征信息受圖像背景灰度、干擾物亮度的影響較大。Wang[2]提出了一種利用四個特征對目標威脅程度進行評估的方法,可以有效區分海面目標的威脅程度,一定程度抑制海面雜波的干擾。Wang[3]通過局部對比度、目標尺寸和目標局部分割占空比等特征信息區分目標和干擾雜波,但是該算法對每個特征信息采取獨立的門限判斷,特殊背景下某些特征算子會失效,易引起誤判。Deng等采用了一種改進的局部對比特征算子,提出了一種加權的局部差異測量特征用于雜波抑制[4]。近年來基于卷積神經網絡類算法在紅外目標檢測方面得到應用,SSD[5]、DSSD[6]、YOLOv3[7]、YOLOv4[8]等在多個網絡層上進行檢測,提高了網絡在不同尺度目標的檢測效果,但是這類算法對目標尺寸有一定的限制,難以適應點狀目標的檢測。目前,機器學習[9~11]類算法在目標檢測場景中也具有較好的表現。
本文分析了紅外目標成像模型和典型干擾雜波的灰度特性,選取了一組可以有效區分紅外弱小目標和干擾雜波的特征組合,包含局部梯度、局部占空比和分割形態特征等,然后利用支持向量機(SVM)對不同特征組合進行學習和評估,實現真實目標和干擾雜波的有效分類。
2 目標模型和背景灰度特征分析
分析目標與背景特征的差異性是實現目標和干擾雜波準確分類的基礎。遠距離目標的紅外輻射經過大氣傳輸后,輻射能量進入紅外探測系統的光學窗口被傳感器接收,能量在大氣傳輸過程中,大氣衍射效應會使目標在紅外焦平面陣列上形成彌散光斑,輻射衍射可近似為高斯分布的點擴散函數,紅外弱小目標的灰度分布可以用二維高斯分布近似為

式中:x0、y0是目標中心坐標;Pr·Ppsf表示目標中心亮度。
圖1是紅外探測系統獲取的實際點目標圖像及其點目標局部區域的灰度分布圖,圖中,左邊為點目標圖像,右邊為圖灰度分布。

圖1 小目標彌散模型
弱小目標和典型地物背景全景紅外圖像具備如下特征:
1)弱小目標一般在空中,灰度分布呈高斯帽狀,尺寸一般小于10×10像素,形態單一,缺少足夠的輪廓細節信息。
2)低空全景圖像區域分布廣,背景灰度起伏較大,主要干擾包括人工建筑物、地面山林、云層和其他地物干擾。
3)干擾物往往呈現片狀、條狀,面積具有不確定性但遠遠大于小目標,干擾物形狀與小目標具有顯著的區別,干擾物的灰度可能大于目標灰度。

圖2 典型地物背景圖像
3 基于特征差異的目標檢測與識別
紅外搜索與跟蹤系統需要從單幀高分辨率圖像中檢測出疑似目標,并對疑似目標進行分類識別,剔除云層、地物等雜波干擾,保留真實目標。該算法先通過TOPHAT濾波器抑制圖像背景;然后對濾波后的圖像進行自適應分割和聚類處理,得到可疑目標信息;然后統計可以目標的局部特征信息,形成特征信息組合;最后利用SVM分類器對特征信息分類,實現真實目標和干擾雜波的精細識別。基于特征差異的目標檢測與識別流程如圖3所示。
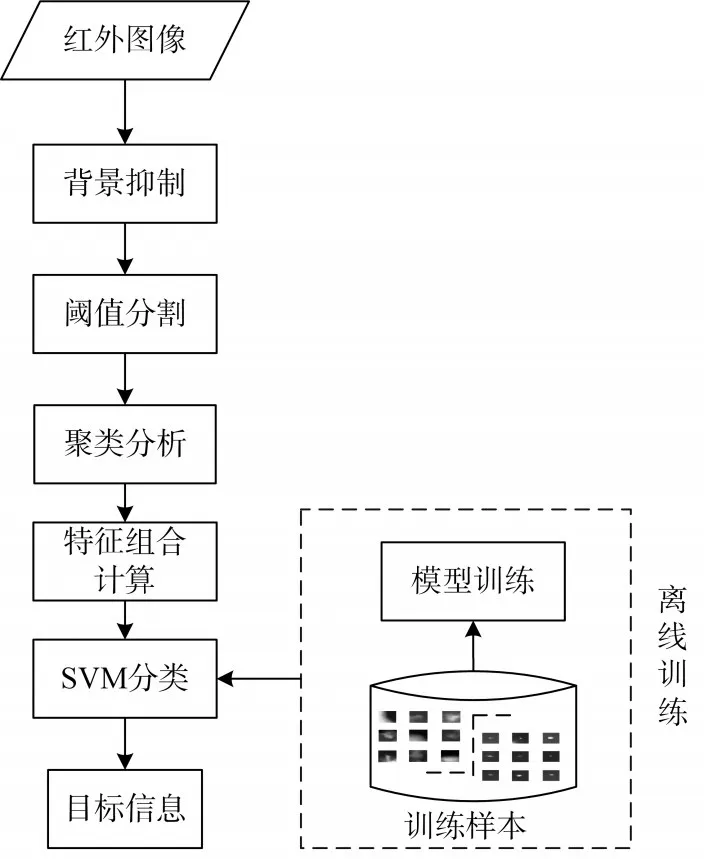
圖3 目標檢測算法框圖
3.1 Tophat背景抑制算法
紅外圖像中的背景部分灰度變化平緩,在頻率域以低頻成分為主,目標為灰度突變的點狀,主要是高頻成分,可以用高通濾波器實現圖像背景和目標的分離。常用的背景估計濾波器有Max-Mean濾 波[12],Max-median 濾波[13],Tophat濾 波[14]等,Tophat濾波屬于非線性濾波器,具有一定的保邊緣特性,對圖像背景擬合的精度較高。
形態學Tophat變換可以描述為

其中,f為變換前圖像,b為結構元素,ftop為Tophat變換后的圖像,°為形態學開運算。
3.2 目標特征組合
為了區分小目標和背景干擾,這里設計了一組目標特征組合,包括局部梯度等級、八鄰域梯度標準差、目標局部占空比、二階矩和圓形度。將這些特征組合為一個向量,組合方式為

其中,F為特征組合,[Np,Sf,R,D,SL] 為組合特征的特征元素。
1)局部梯度等級
對于紅外小目標,其目標中心灰度一般大于其周邊灰度,目標局部有一定的對比度。分別對目標中心和鄰域8個方向取樣,計算中心灰度均值與8方向局部均值的差值(梯度),局部梯度等級為差值大于0的數量,定義如下:

其中,Np表示中心灰度均值與8方向局部均值的差值大于0的數量,count(*)為Ci大于0的數量,Ci為第i個方向的梯度。
這里,m0為目標鄰域灰度均值,mi為第i個方向的鄰域灰度均值,目標局部梯度示意圖如圖4所示。
2)八鄰域梯度標準差
對于典型弱小目標,8方向梯度大小具有一致性,理想情況下,8方向梯度大小相等;對于干擾雜波,由于其灰度分布具有一定隨機性,8方向梯度一般差異較大。八鄰域梯度標準差可以表征目標梯度的一致性特征。其定義如下:
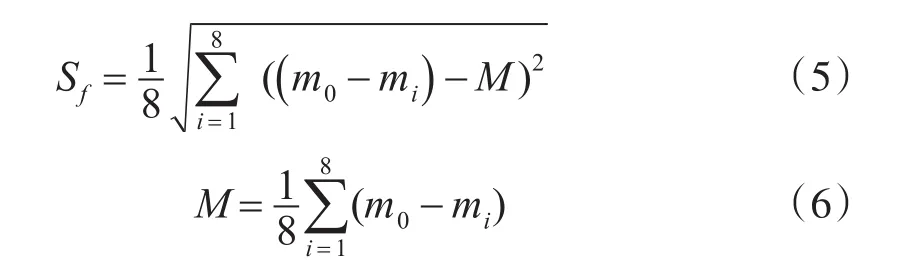
其中,Sf為8方向梯度標準差,M為8方向梯度均值。
3)目標局部占空比
在小目標的局部圖像內,目標區域灰度大于局部背景灰度,通過一定得閾值可以將背景和目標分割出來,分割后典型目標為圓斑狀,目標面積在局部圖像區域所占比率往往小于10%;而干擾雜波灰度分布較復雜,前景和背景無明顯的灰度差異,分割后前景在局部區域內所占面積往往接近50%。
目標局部占空比定義如下:

其中,NI>thd為分割后目標面積;NLocal為局部總面積。

圖5 典型目標和干擾的占空比對比
4)二階矩
二階矩表征目標像素點分布的緊湊度。典型小目標為點狀,二階矩比較小;而干擾雜波局部圖像分割后形狀具有不確定性,可能為條狀或離散隨機形狀,二階矩較大。
二階矩表達式如式(8)所示。

其中,(xj,yj)為分割后非零像素坐標,(μx,μy)表示目標中心坐標。
5)圓形度
圓形度描述了目標的輪廓形狀特性。在分割后的局部圖像中,以目標中心八個方向上離中心距離最遠的像素作為目標外輪廓點,對于典型目標,中心與8個輪廓點的距離相近,距離標準差小,圓形度高。
目標圓形度定義如下:

其中,Li,i∈{1,2,…,8}表示目標中心與外輪廓點的距離,SL為目標圓形度特征。

圖6 目標和云邊緣分圓形度示意圖
3.3 SVM分類器
支持向量機(Support Vector Machine,SVM)是基于統計學習的機器學習法,通過求解一個滿足分類要求的最優超平面[15]實現分類,該超平面在滿足分類精度的同時,使得超平面兩側有最大的裕量。目標檢測問題可以簡化為一個二分類問題[16]。
要得到紅外弱小目標與干擾雜波的分類超平面,則需要構建樣本集如下:
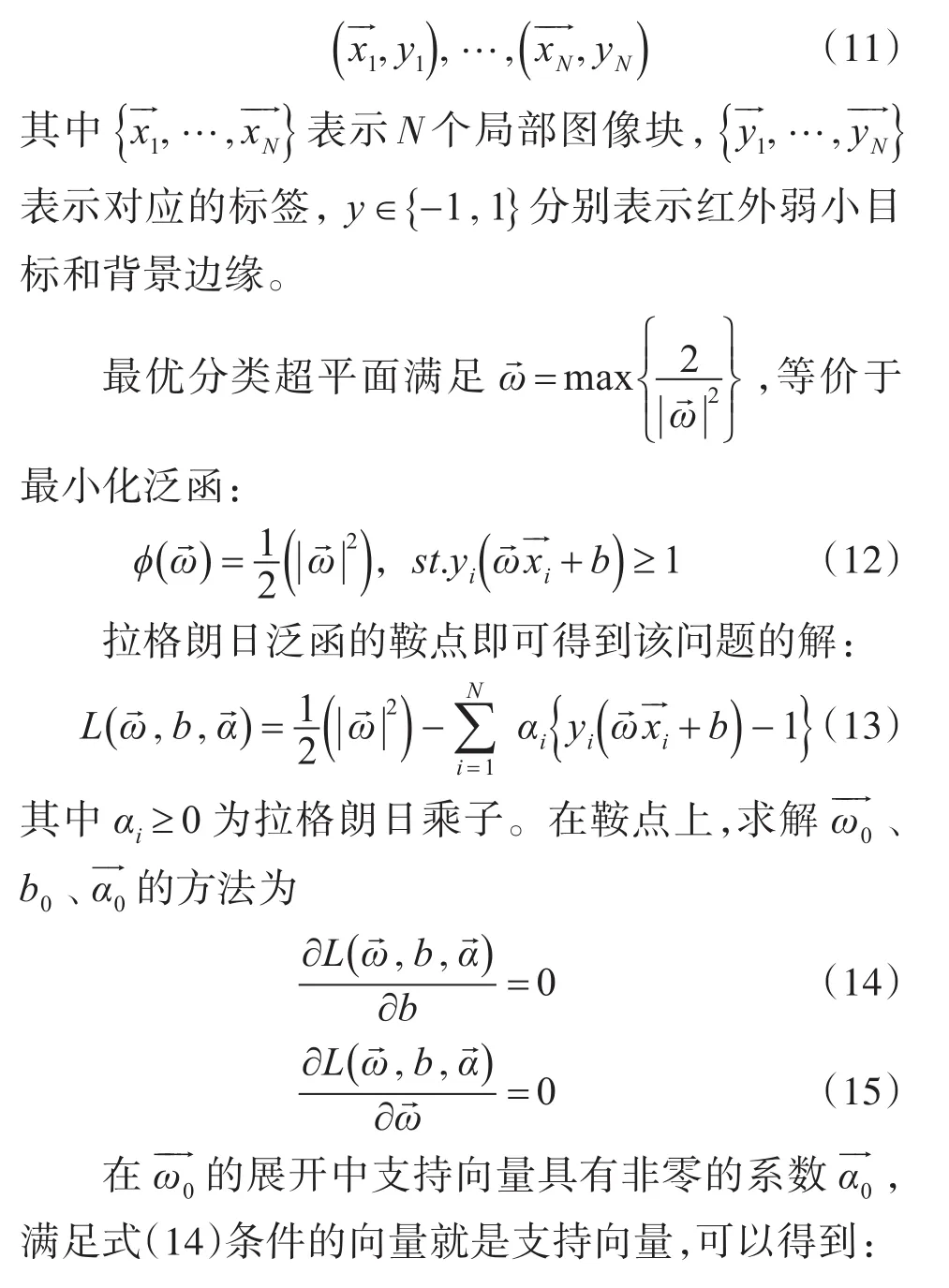

通過以上公式,可完成對樣本集的分類超平面參數學習,從而獲得紅外弱小目標與背景邊緣的分類超平面。
4 試驗驗證
為了驗證本文算法有效性,利用紅外搜索與跟蹤設備采集了一定數量的紅外圖像數據,圖像背景為天空云層背景和低空地物背景,目標為小型無人機和遠距離民航飛機,人工標注了真實目標和干擾雜波圖像樣本。選用了820張為25×25像素的真實目標樣本和1500張干擾雜波樣本圖像。計算訓練圖像樣本的特征組合,利用的特征組合訓練SVM分類器參數。測試過程中,準備1000幀包含小目標的天空、地空復雜背景的紅外圖像,真實目標經過人工標注,對本文算法和經典tophat算法分別進行測試。圖7為目標和干擾雜波樣本集。
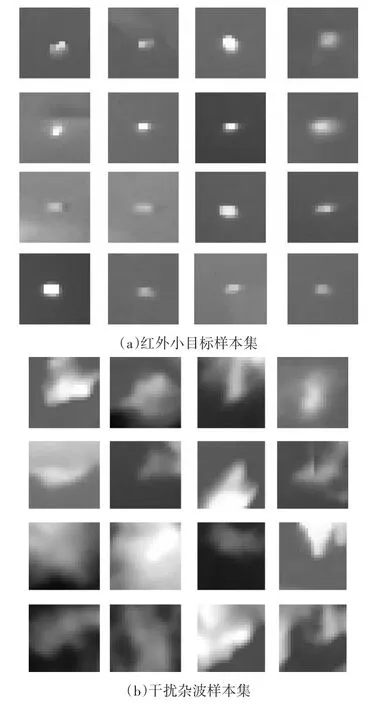
圖7 樣本數據集
圖8實線為本文算法檢測概率和單幀平均虛警數量分布曲線,虛線為經典的tophat目標檢測算法的分布曲線。由分布曲線可知,在同等檢測概率條件下,本文算法的平均虛警數量顯著低于經典tophat算法,說明該算法對雜波有很好的抑制效果;在同等的平均虛警數量條件下,本文算法的目標檢測概率高于經典tophat算法,說明該算法具有很好的弱目標檢測性能。

圖8 算法檢測概率和虛警率分布曲線
5 結語
針對紅外弱小目標和雜波干擾的有效分類的難題,本文分析了典型紅外小目標和干擾雜波的局部灰度分布特征差異性,設計了一組特征組合,并采用SVM分類器對被測目標特征組合進行分類,達到提取真實目標和剔除雜波干擾目的。試驗結果表明,本文算法可以比較有效地實現復雜背景下紅外弱小目標和雜波干擾的有效分類,具有一定的軍事應用價值。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20