采煤機同步牽引控制系統的設計
2021-06-05 09:17:36劉衛峰
機械管理開發 2021年4期
劉衛峰
(山西鄉寧焦煤集團燕家河煤業有限公司,山西 臨汾 042100)
引言
傳統采煤機采用變頻調速系統對設備進行控制存在啟動轉矩小、機械特性軟等問題。為解決傳統采煤機變頻調速的問題,開關磁阻電機調速系統應用而生,其具有大啟動轉矩、調速范圍寬、結構簡單等優勢。隨著采煤工作的需求,當設備需要較大驅動功率時需采用專門指導的大功率電機,大大增加了設備的成本[1]。為此,為采煤機配置兩臺或兩臺以上電動機,由于其對應控制系統性能較差,導致多臺驅動采煤機存在電機參數不一致的問題,常引發電機過載燒毀問題的發生。為解決上述問題,為開關磁阻電機調速系統設計同步牽引控制系統,實現對采煤機速度和電機功率的均衡控制。
1 開關磁阻調速系統概述
開關磁阻調速系統(SRD)為以開關磁阻電動機為核心的調速系統,其結構組成如圖1所示。

圖1 開關磁阻調速系統結構框圖
如圖1所示,開關磁阻調速系統包括有功率變換器、控制單元和檢測單元。其中,開關磁阻電機為該調速系統的核心,其主要任務是實現電能量的轉換;功率變換器主要任務是實現能量的傳輸,其影響整個調速系統的性能;控制器為調速系統的關鍵,其根據現場設備的速度反饋和設定速度對功率轉換器開關器件的開通和關斷進行控制,從而實現對開關磁阻電機的控制;檢測單元主要是對設備位置和電流等信號的檢測,為控制器的策略提供依據[2]。
結合采煤機的現場控制需求,其對應的開關磁阻電機調速系統采用雙閉環控制策略,其中電流為內環控制,速度為外環控制,對應的控制策略框圖如圖2所示。

圖2 開關磁阻電機調速系統控制策略框圖
圖2中的控制模式選擇為調速系統的關鍵,在此基礎上能夠實現根據采煤機的電機的實時轉速信號采用CCC控制模式和APC控制模式。
2 同步牽引控制系統的設計
2.1 交叉耦合同步控制策略的確定
為解決雙開關磁阻電機驅動采煤機時存在反饋偏差和電機參數不一致的問題,對于雙電機驅動系統而言,常固定1號開采磁阻電機的功率值不變,對2號磁阻電機的轉速根據現場實際情況進行調節控制,保證2號電機與1號電機的功率一致。為進一步減小雙開關磁阻電機輸出功率的差值,需對控制系統進行優化改進,真正實現對雙電機的牽引控制。
對于同步牽引控制系統而言,可通過主令參考同步控制、主從同步控制以及交叉耦合同步控制。其中,主令參考同步控制系統,當其中一臺電機被擾動時系統的同步性較差;對于主從同步控制系統而言,當從動電機受到負載擾動時主電機得不到反饋,兩電機的同步性受到影響;交叉耦合同步控制具有好的同步性,其對兩臺電機的轉速信號進行比對,并將對比結果作對其中一臺電機的轉速進行控制[3]。基于交叉耦合同步控制策略能夠獲得更佳的同步控制精度。因此,本文將采用交叉耦合同步控制策略對采煤機的雙開關磁阻電機調速系統進行控制,以確保兩電機輸出功率的平衡。
2.2 雙開關磁阻電機調速系統功率平衡方案的設計
當前雙開關磁阻電機調速系統的主要控制原理為將從電機的輸出功率與主電機一致,主電機根據現場設備工況對其速度、負載轉矩以及其他參數進行控制。該控制系統的主要弊病在于:由于主電機和從電機是通過剛性連接完成的,其控制精度與給定速度相關。實踐應用表明,基于傳統雙開關磁阻電機調速系統能夠將主電機和從電機的功率或轉矩輸出差控制在10%以內,解決了牽引電機被燒毀的問題。但是,基于主從控制方式,從電機的輸出功率完全根據主電機進行控制,當主電機運行功率低于或者高于其額定功率時,導致牽引系統的整個功率過低或者功率過高,影響整機的運行效率[4]。
為解決上述問題,本文將交叉耦合同步控制策略應用于傳統雙開關磁阻電機調速系統中,最終使得主從電機的功率和轉矩偏差更小,系統的響應速度更快。基于交叉耦合同步控制策略的同步牽引控制系統原理如圖3所示。

圖3 基于交叉耦合同步控制策略的同步牽引控制系統原理圖
如圖3所示,基于交叉耦合同步控制策略,當兩臺開關磁阻電機的轉速不一致時,同時對兩臺電機進行調整控制,即對大功率電機施加負電流補償信號,對小功率電機施加正電流補償信號,最終達到平衡狀態。
3 同步牽引控制效果的仿真分析
為驗證基于交叉耦合同步控制策略下的同步牽引控制系統的控制性能,本節基于MATLAB軟件分別對比傳統主從控制策略和交叉耦合同步控制策略下同步牽引系統的控制效果。所選擇開關磁阻電機的參數如表1所示。
3.1 主從控制策略同步牽引系統的控制效果
仿真背景:兩電機分別以額定轉速和額定功率運行且電機的負載轉矩額定為141 N·m,并在5 s時分別對兩臺電機施加轉矩為15 N·m的負載,對同步牽引系統的響應特性進行仿真,仿真結果如圖4所示。

表1 開關磁阻電機參數

圖4 主從控制策略下同步牽引控制系統的響應特性
如圖4-1所示,當電機受到15 N·m的負載轉矩時,電機轉速明顯下降且最大降幅為3.5%;而且,在受到擾動1.5 s后電機又以額定轉速繼續運行;如圖4-2所示,1號開關磁阻電機在階躍負載的影響下輸出轉矩明顯下降,且最大降幅為15 N·m,下降時間為2 s;1號電機在擾動2 s后輸出轉矩開始上升,且上升幅度為5.64 N·m;2號開關磁阻電機在階躍負載的影響下輸出轉矩開始下降,降幅為9.87 N·m,下降時間為4.3 s。總的來說,系統受到負載擾動后,在主從控制策略下兩電機的達到平衡所需時間為4.3 s,且最終穩定的輸出轉矩為131.13 N·m。
3.2 交叉耦合同步控制策略同步牽引系統的控制效果
仿真背景:兩電機分別以額定轉速和額定功率運行且電機的負載轉矩額定為141 N·m,并在5 s時分別對兩臺電機施加轉矩為15 N·m的負載,對同步牽引系統的響應特性進行仿真,仿真結果如圖5所示:
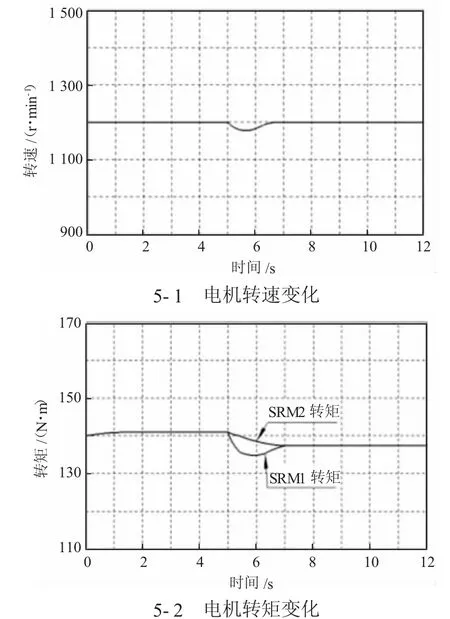
圖5 交叉耦合同步牽引控制系統的響應特性
如圖5-1所示,當電機受到15 N·m的負載轉矩時,電機轉速明顯下降且最大降幅為0.5%;而且,在受到擾動1 s后電機又以額定轉速繼續運行;如圖5-2所示,1號開關磁阻電機在階躍負載的影響下輸出轉矩明顯下降,且最大降幅為7.05 N·m,下降時間為0.8 s;1號電機在擾動0.8 s后輸出轉矩開始上升;2號開關磁阻電機在階躍負載的影響下輸出轉矩開始緩慢下降,降幅為4.23 N·m,下降時間為2 s。總的來說,系統受到負載擾動后,在交叉耦合同步控制策略下兩電機的達到平衡所需時間為2 s,且最終穩定的輸出轉矩為136.77 N·m。
4 結語
雙電機采煤機可滿足實際生產中大功率、大轉矩的要求,但是由于雙電機輸出功率不一致常導致電機燒毀的問題。當前,基于主從控制的同步牽引控制系統雖然能夠解決電機燒毀問題,但是其控制精度較差,電機的轉速差或功率差值仍然很大[5]。為此,本文基于交叉耦合同步控制策略對雙開關磁阻電機調速系統進行控制,并經仿真表明,該控制系統具有響應速度快、輸出轉矩偏差小的特點。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
防爆電機(2022年1期)2022-02-16 01:14:06
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
河南科技(2014年18期)2014-02-27 14:14:58