水產養殖水下機器人研究進展
2021-06-08 04:55:40夏英凱朱明曾鑫王懿偲齊湘洪
華中農業大學學報(自然科學版) 2021年3期
夏英凱,朱明,曾鑫,王懿偲,齊湘洪
1.華中農業大學工學院,武漢430070; 2.農業農村部長江中下游農業裝備重點實驗室,武漢 430070
水產養殖是增加人類優質蛋白質的重要渠道[1],對保障人類食物安全發揮了重大作用。近年來,中國的水產養殖業發生了翻天覆地的變化,養殖規模逐年遞增,產量穩居世界第一,但仍面臨著嚴峻的挑戰,包括水質污染嚴重、養殖效率低下、機械化及自動化程度低、人工危機[2-3]等。因此,水產養殖業亟需從養殖模式、裝備等方面進行全面的轉型升級。
水下機器人作為水下工程裝備中的一支生力軍,與潛水員等傳統水下作業手段相比,在作業范圍、環境、模式等方面均有明顯優勢,符合新型水產養殖裝備的需求,具有廣闊的應用前景。發展水產養殖水下機器人是實現水產養殖業向資源節約、產出高效、生態安全、機器換人等方向發展的關鍵,有望為中國水產養殖業帶來新的發展機遇。
盡管水下機器人的研究及應用已日趨成熟,在各行各業都取得了顯著成效[4-5],但受養殖模式、成本、裝備適應性等問題限制,水下機器人在水產養殖業的推廣應用仍非常有限。本文將對水產養殖水下機器人的研究現狀及關鍵技術進行綜述,并展望其未來發展趨勢,以期提供綜合性參考。
1 水產養殖水下機器人應用現狀
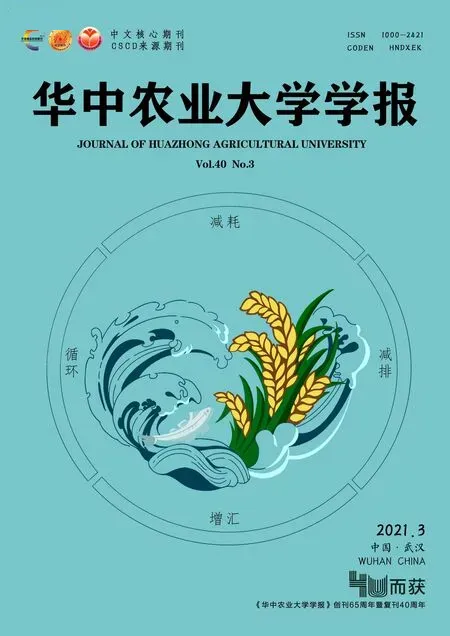
在水產養殖實踐中,水下機器人首先應用于水產養殖監測。通過搭載攝像機、聲吶、水質傳感器等設備,借助水產養殖水下機器人機動靈活的運動能力,可實現對養殖環境及對象的大范圍監測,典型的應用場景如圖1所示[6-9]。Karimanzira等[6]在水下機器人上搭載了導電率、溶氧等傳感器,并設計了任務規劃及制導系統,實現了大范圍養殖水質監測。王潤田等[10]提出了一種深水網箱養殖的聲學監測方法,將聲吶傳感器搭載于水下機器人,根據深水網箱規格預設巡視路線,實時監測并上報透魚現象。Rundtop等[11]將超短基線定位系統和多普勒測速系統集成在水下機器人上,通過試驗驗證了其在水產養殖網衣檢查中的表現。F?re等[12]討論了水下機器人在精準漁業養殖方面的優勢,并建議開發基于聲學和視覺的導航系統,以避免水下機器人在網箱中執行監視任務時碰撞養殖設施或魚類。Forst等[13]設計了一種用于水產養殖的ROV(remotely operated vehicle),其搭載了視頻相機,可通過自動圖像處理實現養殖監測。除了上述應用外,還可以借助水產養殖水下機器人,完成水產品生長狀態評估[14]、行為研究[15]、攝食預測[16]等水產養殖監測工作。
其次,水產養殖水下機器人可搭載機械手、捕撈網、清洗裝置等工具,基于作業目標識別與定位、制導與控制,完成養殖產品收獲、網箱清洗、死魚撿拾、漏洞檢測及修補等復雜任務。房熊等[17]設計了不同形式的水產養殖水下機器人模型,搭載了水下機械手、捕撈網等,可用于捕撈作業。卜力群[18]設計了一種水下養殖作業機器人,搭載了2個機械手臂、餌料存儲箱及投料捕獲執行機構,具備多種作業能力。周建龍[19]設計了可實現飼料投喂及水草切割的新型水產養殖機器人。劉冠靈等[20]設計了一種履帶式深海網箱清洗機器人,依靠反沖裝置和2組三角履帶輪實現貼附網衣表面行走,同時清洗網衣,清洗效果良好。
此外,水產養殖水下機器人還可與其他的水面、水下、空中平臺(如水面船舶、水下探測節點、無人機等)靈活組網,并借助地面基站、衛星等通信設備,構建“水陸空天”一體化監控系統。在此系統中,水產養殖水下機器人根據規劃路徑大范圍移動,并采集養殖設施及其他水下節點的信息,將其上傳至監控網絡,從而實現對于大范圍水產養殖區域的長效動態監控,同時還可根據實際需求開展多種養殖作業。
盡管水下機器人已經逐步被應用在水產養殖中,但其發展趨勢仍然較慢,推廣程度遠不如其他領域。在歐美等發達地區和國家,水產養殖水下機器人研究水平相對較高,少數公司甚至推出了系列產品。國內起步較晚,相關研究較少,一些基礎性問題仍有待解決。下文將對水產養殖水下機器人的關鍵技術進行分析。
A:大范圍水質監測[6] Wide-range water quality monitoring; B:漁網監測[7] Fish net monitoring; C:剩余餌料監測[8] Residual fishing bait monitoring; D:魚類行為監測[9] Fish behavior monitoring.
2 水產養殖水下機器人關鍵技術
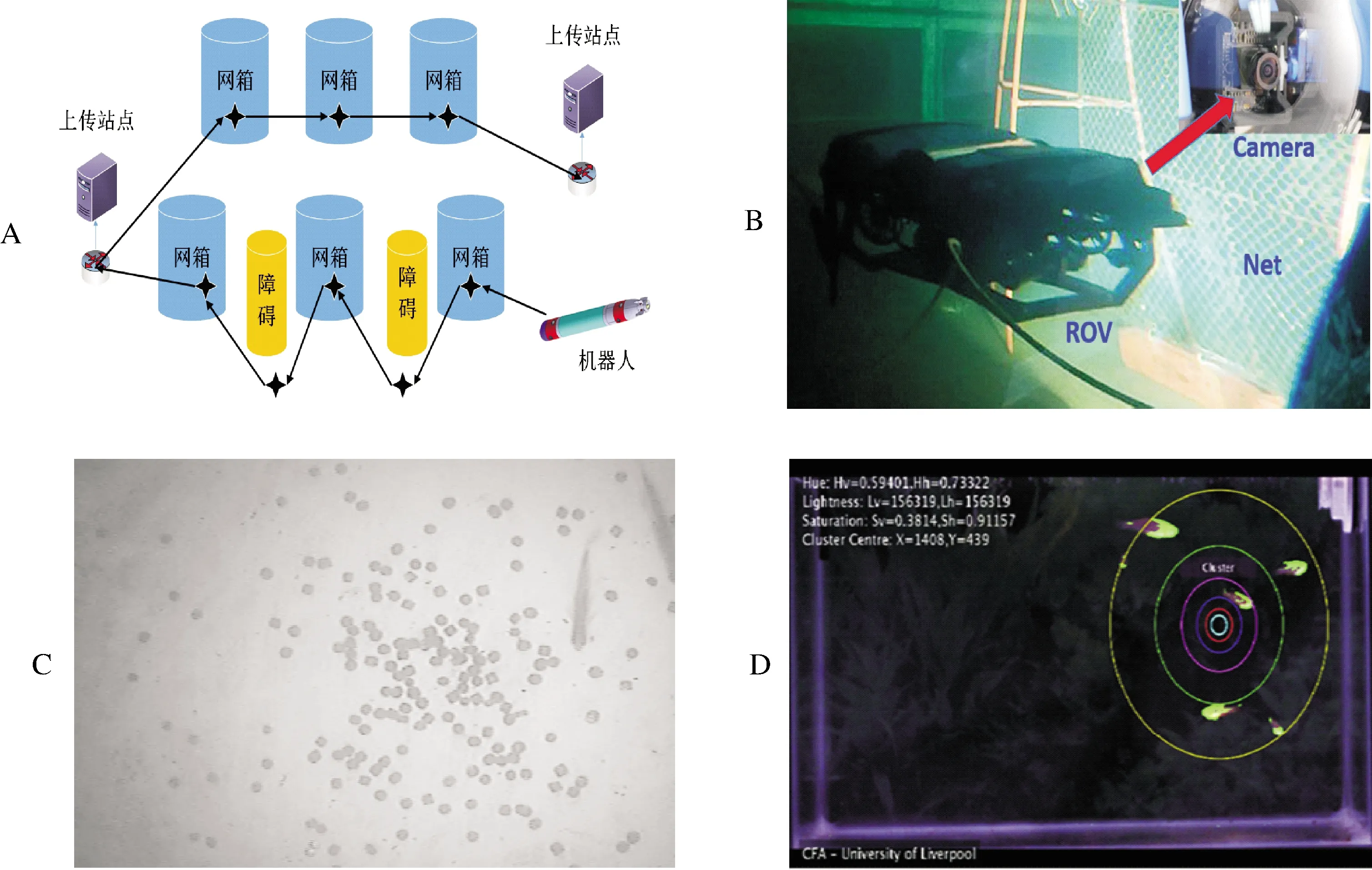
在弱光照、多擾動、強耦合、時變、非結構化的水下環境下,利用水產養殖水下機器人開展高效、精準的水產養殖監測及作業,通常需解決水質監測、視頻監控及傳輸、水產目標識別與定位、水下導航、智能規劃與控制、水下機器人-機械手協同作業等關鍵技術問題,如圖2所示。
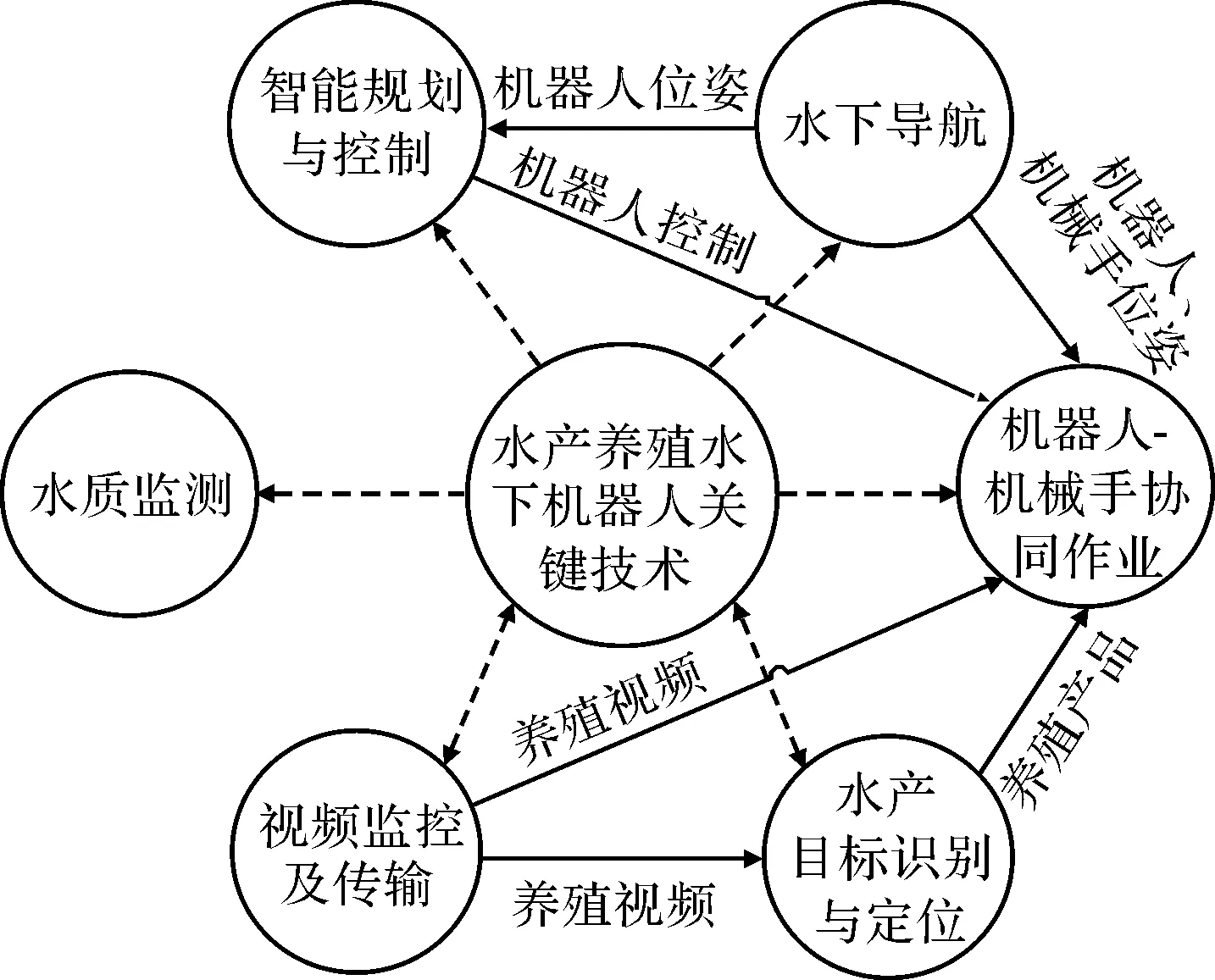
圖2 水產養殖水下機器人關鍵技術Fig.2 Key technologies of aquaculture underwater vehicles
2.1 水質監測
水產養殖水質易受生物、物理、化學、水文氣象和人類生產活動等多因素交叉影響,作用機制復雜,具有多變量、非線性、模糊不確定等特點[21],直接影響著水產品的產量與品質[22],因此,開展水質監測意義重大。傳統的人工觀察或采樣監測等方式時效性差、可靠性低、監測范圍有限,不能及時反饋水質的問題,嚴重影響水產品的成活率,可能造成不可挽回的經濟損失[23]。隨著科技的進步,網絡化、自動化的監測方式逐漸成為研究熱點[24]。但對于大型養殖水域而言,采用傳感網絡的監測方式存在機動性不足、采樣區域有限的問題。
利用水產養殖水下機器人開展水質監測作業,能夠大大提升水質監測的機動靈活性、效率與監測范圍。但是在機器人狹小的空間內,所能安裝的水質傳感器數目有限,必須解決水質傳感器的有效性及配置優化問題。隨著使用時間延長,水質探頭上會附著各種污漬及雜物,使探測準確性變差,甚至無法使用,需要定期清洗乃至更換。在水下機器人上集成后,水質傳感器的清洗及更換會更加麻煩,因此需要設計自動清污裝置,對水質探頭進行定期清洗[25]。此外,為了解決傳感器設備故障問題,還可在空間允許的前提下,采用多傳感器配置方式[26],以提升水質監測的可靠性。
除了提升傳感器的可靠性外,還需解決水質數據分析及處理問題。受復雜養殖環境等因素影響,水質傳感器采集的數據面臨缺失、失真、冗余、異常波動、噪聲干擾大等諸多問題。因此,需要根據實際需求對傳感器采集的數據進行降噪、特征提取、修復、重構等處理[27],才能得到準確的水質分析結果。樊春春[28]設計了一套基于物聯網的水產養殖智能監控系統,采用小波變換算法對采集到的參數進行降噪處理,并采用基于RBFNN的模糊控制算法解決了數據滯后的問題。劉雙印[29]針對水質監測數據缺失和噪聲問題,通過線性插值法、相似數據的水平和垂直處理均值法對數據進行修復,并采用改進小波分析方法進行降噪和特征提取。Yu等[30]采用融合小波分析和獨立分量分析方法對水質參數進行了特征提取,有效減少了噪聲干擾。
水質預測是水質監測中的另一關鍵環節,是根據已掌握的資料和監測數據,對水質在未來空間和時間上的變化規律及發展趨勢進行估計和推測,為防止養殖水質進一步惡化和制定水質改善措施提供決策依據[31]。目前,應用較多的方法包括以經典數學為基礎的傳統預測方法及以計算智能為基礎的現代預測方法等。傳統預測方法主要包括:Markov法[32]、回歸分析預測法[33]、時序分析預測法[34]及函數模型預測法[35]等。傳統的預測方法自適應能力較弱,且部分方法在建模時需要龐大的數據量支撐,嚴重影響了預測的效率和精度。結合計算智能的現代預測方法有效地解決了傳統方法存在的問題,常見的現代預測方法包括灰色理論法、人工神經網絡法、最小二乘SVR預測法等。考慮到不同水質參數之間具有很高的耦合性,作用機制難以簡單分析,應用單一的預測方法可能存在局限性,因此基于計算智能的組合預測法將成為未來的重要發展趨勢。
綜上,利用水產養殖水下機器人開展水質監測時,必須妥善解決傳感器優化配置與清污、數據融合分析以及水質預測等問題。
2.2 弱可視條件下視頻監控及傳輸
傳統水產養殖業的增氧、投飼、用藥等幾乎全部依靠經驗,對工人的素質要求較高,實際生產中往往為了達到較好的效果,多增氧、多投飼、多用藥,造成了不必要的浪費,也影響了水產品的健康品質。利用水產養殖機器人開展水下視頻監控,能夠有效監測水產品成活率、生長情況及養殖環境,及時發現水產品逃逸或死亡情況,以及殘留飼料,底質腐臭、板結、青苔和其他池塘污染問題,從而有的放矢地采取相關措施。同時,借助于水下機器人靈活的運動能力,可實現移動式全方位的視頻監控,對于水產養殖業而言意義重大。但是,利用水產養殖水下機器人開展視頻監控作業,不僅需克服弱光照、渾濁水質以及水產品隨機運動等困難,實現圖像準確捕捉及采集,還需適應不同傳輸介質,實現高效、高質量、高可靠性的水下視頻傳輸。
在水下圖像捕捉及采集方面,利用視頻采集系統可以直接對目標實現高速成像且圖像細節清晰、分辨率高,能夠獲得豐富的目標特性和水下環境特性,相對于聲學手段而言更加直觀,近年來在水產養殖業上得到越來越多的應用。張金泉等[36]設計了一種搭載視頻監控系統的框架式AUV(autonomous underwater vehicle),用于海上網箱網衣檢測,可獲得清晰的視覺圖像,從而方便地判斷網衣破損情況。但是由于水對光的吸收特性使得光在傳輸過程中能量發生嚴重的衰減,造成成像質量下降,因此視頻監控技術適合近距離水產目標信息的獲取[37]。此外,水有較強的散射特性,導致水下圖像中水產品目標和背景的對比度降低,造成圖像模糊[38],同時光學圖像也會受到弱光照條件及渾濁養殖環境的影響,因此利用水下視頻監控獲取高質量的水下光學圖像面臨很大的挑戰,不僅需要對攝像、補光等硬件設備進行改進,還需設計合理的圖像處理算法[39]。
水下視頻傳輸是水產養殖視頻監控的另一個關鍵環節。實時、清晰、穩定的視頻傳輸將會給水產養殖監控帶來極大的便利。針對ROV和AUV這兩種不同類型的水產養殖水下機器人[40],視頻傳輸的處理方式有所不同。ROV采用有線工作模式,其水下載體與岸基之間通過光電復合纜連接,水下視頻信息可借助光電復合纜進行實時、可靠、穩定、長期的傳輸。典型的ROV視頻光纖傳輸系統主要包括水下攝像機、照明燈、艇載控制單元、艇載光端機、水面光端機、水面控制單元等,如圖3所示。艇載控制單元可根據養殖水體內的可視條件完成燈光亮度調節、攝像機調焦和聚焦控制等[41],從而彌補水質混濁和光線暗淡的影響。AUV與水面支持系統之間沒有光電復合纜相連,因此水下視頻只能通過無線傳輸。一般而言,AUV多采用水聲傳輸,但是水聲信道具有時變多徑特性且易受噪聲影響,帶寬較窄,容易產生誤碼。為達到實時的效果,必須將圖像數據在傳輸之前進行大幅度壓縮[42],并進行抗誤碼處理[43]。早期的水聲信道圖像傳輸系統,多采用靜態圖像壓縮方法,壓縮比不高,一般一幀圖像需要幾秒來完成傳輸[44]。在視頻動態壓縮編碼方法的研究方面,文獻[45]提出一種基于小波變換的壓縮算法,水聲信道傳輸速率20 kbps,以10幀/s的速率傳輸144像素×176像素的灰度圖像;文獻[46]研制的水下視頻傳輸系統,水聲信道的數據傳輸速率可達128 kbps,采用MPEG-4壓縮,速率為10幀/s。
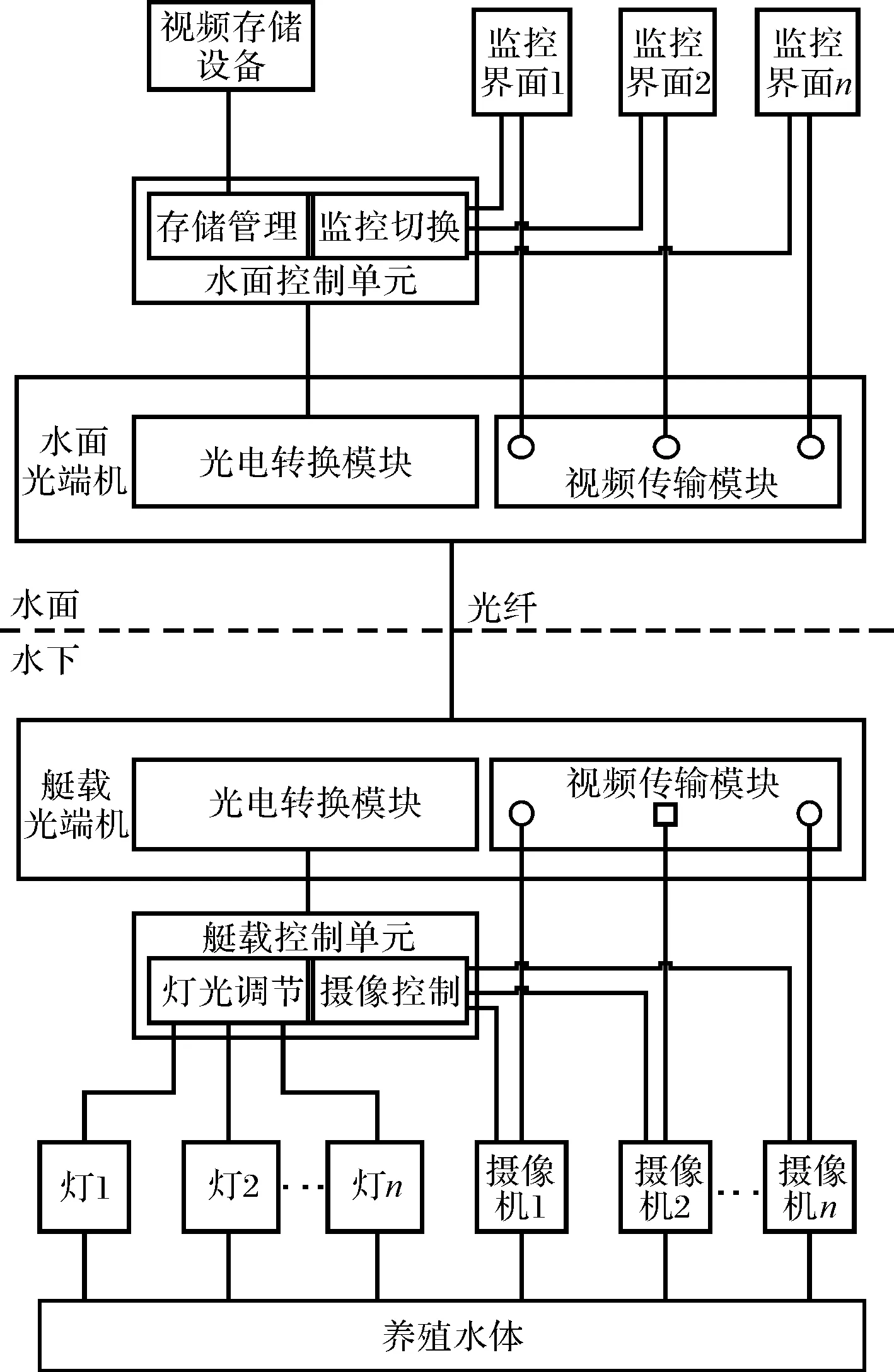
圖3 典型的ROV視頻光纖傳輸系統Fig.3 Typical video optical fiber transmission system of ROV
2.3 多擾動下水產目標準確識別與定位
水產目標的準確識別與定位是養殖作業的基礎。要實現高效、精準的養殖作業,必須準確、快速識別水產品的種類及生長狀態等。但是,在水產目標的準確識別定位過程中,往往面臨以下問題:(1)養殖產品狀態隨機性強,無規律可循,難以捕捉及預測目標動態;(2)養殖產品往往處于快速運動狀態,對目標識別及定位的實時性提出了較高要求;(3)養殖產品生長狀態參差不齊,外形差異較大,難以用統一的標準來評估及識別;(4)水體環境差,受飼料殘渣、糞便等眾多干擾物及水體散射作用影響,圖像采集效果差,質量不穩定,會產生多陰影、噪點多及對比度下降等不利效果,影響目標定位識別。總之,上述因素可能導致水下機器人“看不清”“找不到”“抓不準”,為水產目標的準確識別與定位帶來巨大的困難。
水產目標的準確識別與定位總體上可分為目標信息獲取及識別定位2個環節。在目標信息獲取方面,常用的手段主要有視覺、水聲、激光等。視覺依賴于水體的可見度,在清水環境中,最大可視距離可達10 m左右,但在混濁的水域,最大可視距離往往會大幅縮短。水聲作業距離遠、分辨率高,目前仍是水下目標定位的主要方法,但容易受到復雜水體環境干擾,增加了目標識別的難度。激光是近年來發展起來的新方法,體積、功耗都較小,比較適合水下機器人使用,但目前尚不成熟。由于采用單一的目標獲取手段均有一定的缺陷,在實際應用中,可以采用多手段融合的探測方法[47]。
在有限的探測手段基礎上,設計良好的識別定位方法是提升水產目標識別能力的關鍵。一般的水下目標識別與定位流程包括圖像濾波、邊緣提取、特征量提取和目標識別判斷等[48]。圖像濾波一般分為線性濾波和非線性濾波兩類。線性濾波原理簡單、易于實現,但當圖像中含有信號與噪聲彼此相關的非疊加性噪聲時,線性濾波方法不再適用,此時需依賴于非線性濾波技術。皮志鋒[49]針對海參捕撈任務,設計了改進中值濾波算法,并對圖像進行模糊增強,提升了圖像處理的效果。特征提取及匹配是目標識別過程中的另一重要環節,其通過計算機提取圖像上的關鍵信息點進行特征分析,并依據分析結果對目標進行匹配、識別和分類[50]。由于水下特殊的成像環境,紋理特征和顏色特征損失嚴重,因此通常采用基于形狀特征的目標識別方法[51]。并且,隨著圖像識別等技術的發展,近年來深度學習、機器視覺等新方法開始逐步應用到水下目標識別領域。王衛華等[52]研究了如何在海底管線檢測維修工作中,應用機器視覺實現管線快速識別與精確定位。Kim等[53]提出了一種面向多幀不交疊R標序列圖像識別的Snake跳躍模型,在疊加應用識別中能完成對快速移動物體的判別。
盡管水下目標識別技術近年來已取得了長足的進步,但其在針對動態移動目標的在線識別方面還存在一定的缺陷。尤其對于水產養殖業而言,不僅會面臨動、靜態多目標的快速識別及特征精確分析任務,而且還面臨弱光照、時變浪/流影響、復雜水質、機器人不確定狀態等多源復合擾動影響,難度更大。綜合利用多源融合探測手段,結合水產品特性開展目標識別技術研究,是在多擾動環境下實現水產目標準確識別與定位的關鍵。
2.4 復雜養殖環境中水下機器人高精度導航技術
導航是水產養殖水下機器人的關鍵技術。機器人的水下定位、跟蹤控制、養殖作業等都依賴于精確的導航參數。但是,考慮到未知、非結構化的水下養殖環境,以及復雜的水產養殖任務,實現長效而精確的導航定位難度很大。考慮到水對電磁信號的衰減作用,陸基常用的導航技術在水下并不完全適用,使得水下導航成為了一項頗具挑戰的課題[54-55]。現有的水下導航技術,主要包括船位推算、聲學導航、慣性導航、視覺導航、地球物理導航等。這些導航技術都可以單獨應用于水下機器人開展水產養殖作業,但它們各有優缺點[56-58],如表1所示。
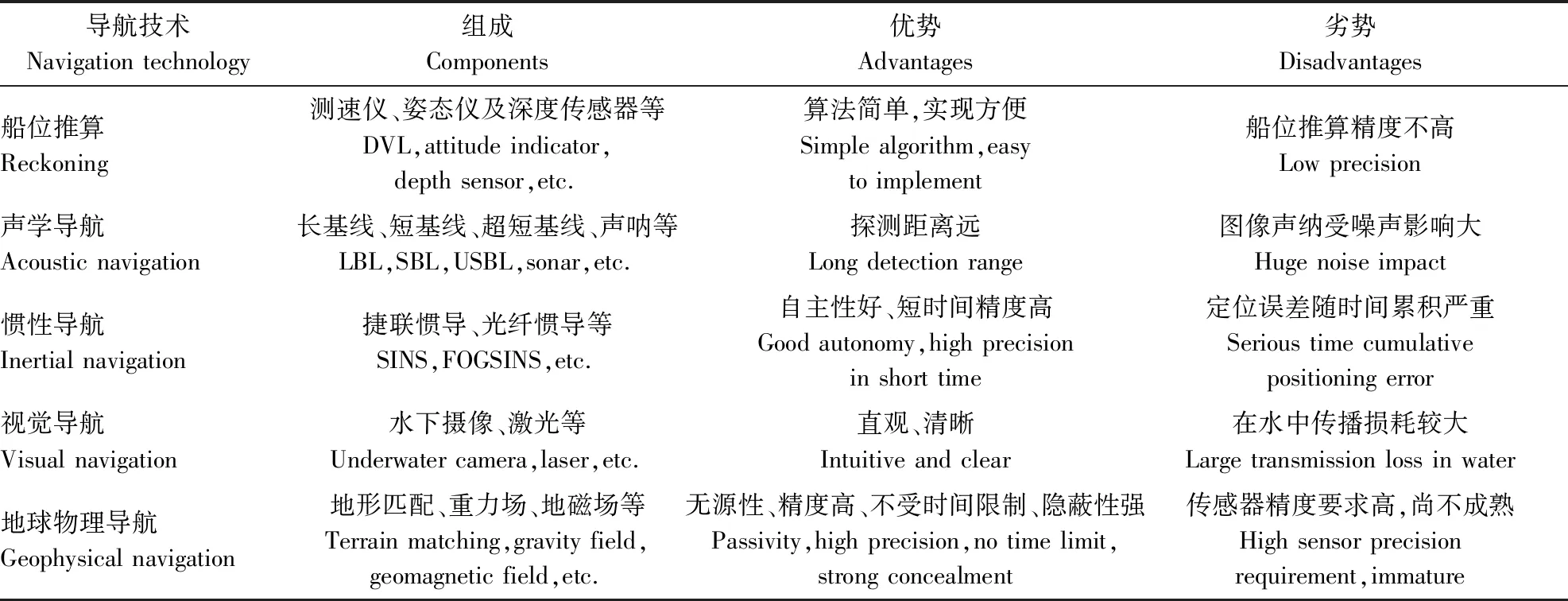
表1 常用的單一水下導航技術Table 1 The commonly used single underwater navigation technology
在上述水下導航技術中,慣性導航因其突出的技術優勢,往往被用作水產養殖水下機器人的核心導航技術。但是,慣性導航裝置只能維持短時間內的高精度測量,在執行長時間水產養殖作業任務時,定位誤差隨時間延長而累積嚴重,因此需要其他導航傳感器(如DVL、GPS、APS等)的輔助[59-60],并進行多傳感器組合導航。借助卡爾曼濾波、粒子濾波等融合算法[61-62],有效融合不同導航傳感器數據,不僅可以取長補短,大大提高導航精度,提升系統可靠性和容錯能力,而且可以適當降低單一傳感器的精度要求,降低設備成本和技術難度,目前已在水下機器人中廣泛應用。Liu等[63]利用DVL對慣性導航系統進行定期修正,以彌補慣性導航的誤差累積影響,仿真結果表明,SINS/DVL組合導航比純慣性導航有更高的定位精度。Lü等[64]為了提高導航的魯棒性并避免DVL數據丟失的影響,基于最優極限學習方法提出了一種智能速度模型來輔助導航。Zhang等[65]提出了一種基于聲音的測距和定位方法,通過不同工況下的誤差分析準確補償航位推算誤差,提高了導航精度。Sun等[66]提出了一種基于反向超短基線的AUV導航系統,具備多用戶容納、隱蔽巡航、長航程有效等諸多優勢。
盡管多傳感器組合導航技術顯著提升了導航的精度,然而對于水產養殖而言,水產養殖水下機器人導航技術不僅涉及機器人沿預定路徑行進過程中的導航問題,還包括水產養殖作業問題。以網衣監測和水產品捕獲為例,水產養殖水下機器人在執行此類作業任務時,需依據作業目標實時調整運動軌跡和姿態,因此需要兼顧水產養殖水下機器人特性、環境影響及作業目標影響。視覺同步定位與映射(VSLAM)[67]是一種新興的導航定位技術,對于水產養殖水下機器人而言,將VSLAM技術與常用的水下組合導航技術相結合,可以在提升導航精度的同時兼顧水產品的視覺感知,將有助于動態養殖作業任務的實現,是未來重要的發展方向。此外,一般而言,光纖慣性導航的精度與其內部光纖陀螺的尺寸成正比,想要獲得高精度的導航數據,需要相對較大的慣性導航設備,這與水產養殖業對機器人小型化、低成本化的需求相矛盾。因此,小型化、低成本、高精度的導航設備研發將是水產養殖水下機器人導航技術的另一重要研究方向。
2.5 內外環境強擾動下水下機器人智能規劃與控制
在開展水產養殖監測及捕撈作業過程中,為了使機器人的行進路徑覆蓋關鍵的監測區域,并使其位置、姿態、速度等滿足準確捕撈的作業需求,需要對機器人的運動參數進行嚴格約束,因此水產養殖水下機器人必須具備良好的規劃及控制能力。但是,考慮到水下機器人存在強交叉耦合、非線性、參數攝動等特性,與復雜養殖環境交互時還面臨著時變且不易觀測的持續浪、流等外部干擾,同時在作業過程中還必須準確感知并避開養殖產品及設施,實現準確的規劃與控制非常不易。根據水產養殖作業需求及工作環境,可將水產養殖水下機器人的規劃與控制劃分為路徑規劃、運動控制及動態避障等3個環節,其邏輯關系如圖4所示。
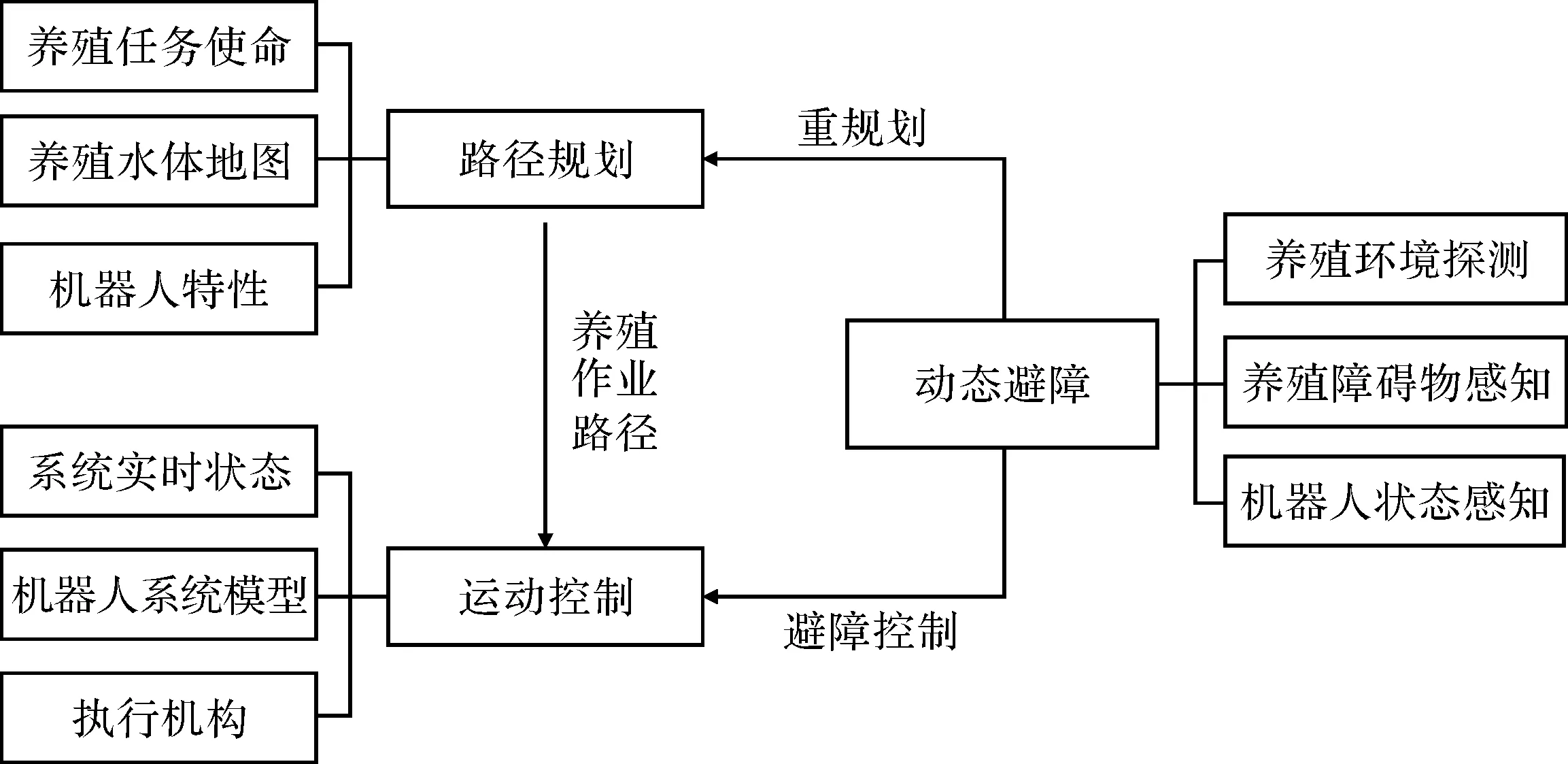
圖4 水產養殖水下機器人規劃與控制Fig.4 Planning and control of aquaculture underwater vehicle
在路徑規劃方面,水產養殖水下機器人需結合養殖作業任務、水體環境及機器人特性,設計覆蓋關鍵養殖區域的合理路徑。在設計路徑時,需考慮空間約束、機器人運動約束、水流擾動、空間遍歷性、不重復性及能源消耗等多重因素。目前,水下機器人路徑規劃算法總體上可分為三類:幾何模型搜索、人工勢場法以及人工智能方法[68]。幾何模型搜索方法需在建立環境模型的基礎上設計搜索策略,對環境模型的精細程度依賴性強。環境建模方法包括可視圖、Voronoi圖、單元分解法等,常用的搜索策略包括A*、D*算法[69]等。其中,A*算法比較適合靜態路徑規劃,在規劃空間范圍較大時,A*算法搜索效率不足,D*算法比較適用于進行動態路徑規劃。人工勢場法是創建一個虛擬的力場,并通過建立引力場函數、斥力場函數來進行路徑規劃,其優點是規劃的路徑一般比較平滑,算法模型實現簡單,但當地形過于復雜時,完全遍歷路徑規劃有可能陷入局部最優解,從而產生遺漏區域[70]。人工智能算法參考動物行為進行尋優設計,目前主流的人工智能規劃算法包括粒子群算法、蟻群算法、進化計算、遺傳算法、神經網絡、機器學習等[71],采用智能算法不需要精確的環境模型,搜索能力強且能夠得到全局最優解。
在運動控制方面,水產養殖水下機器人往往面臨如下難題[72]:模型高度非線性和時變水動力特性;變負載影響;附加質量大,運動慣性大;精確的水動力系數難以獲取;復雜養殖環境帶來時變擾動且難以直接測量等。為了克服上述內外環境強擾動,運動控制器設計必須兼具良好的制導[73]以及魯棒控制[74]能力。常用的運動控制算法包括PID控制、自適應控制、滑模控制、反演控制、模糊專家控制、神經網絡控制等,如表2所示。由于每種算法都存在不足之處,在運動控制器設計過程中往往根據實際養殖作業需要,將各種算法融合使用。
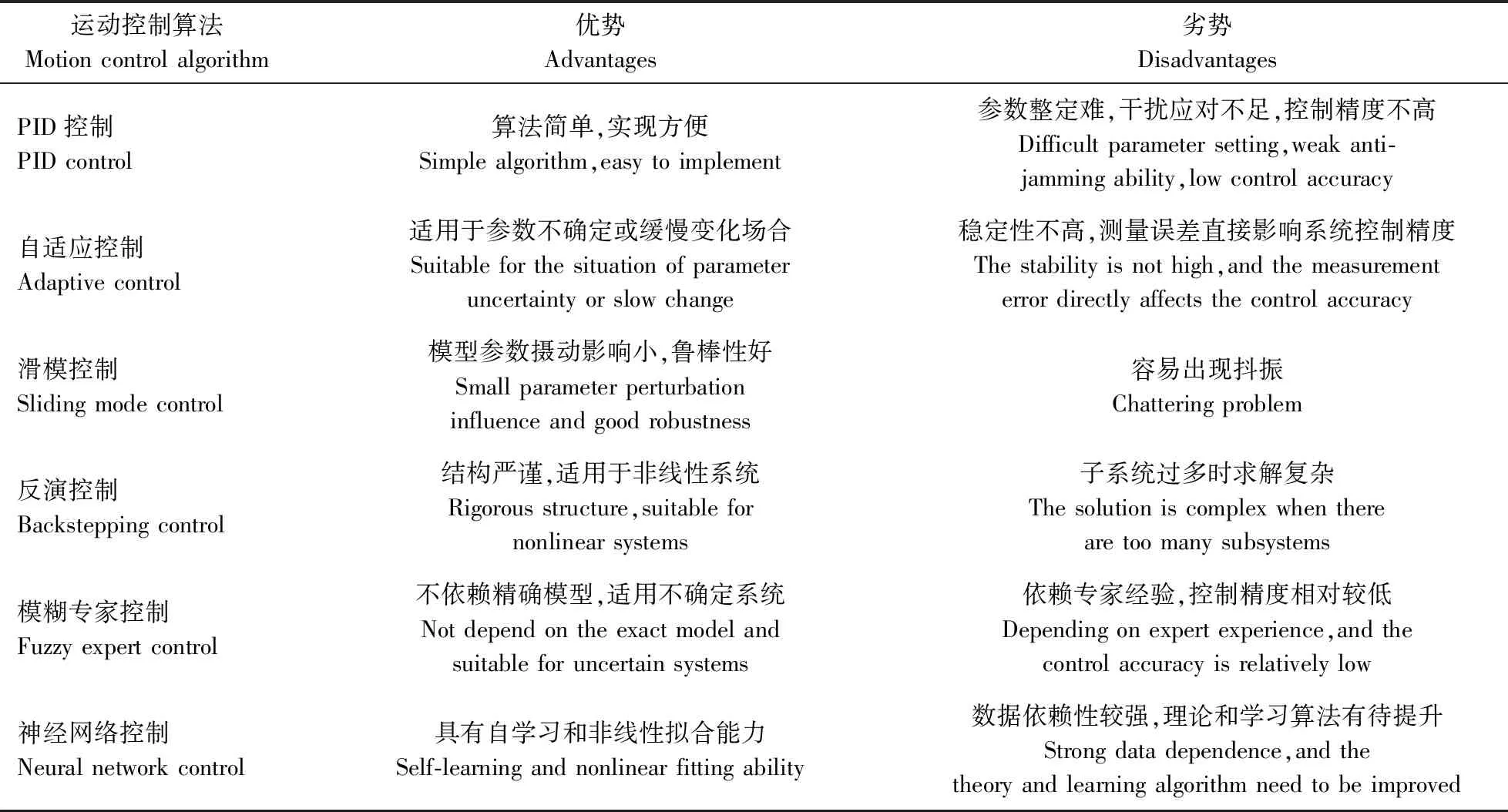
表2 常用的水產養殖水下機器人運動控制算法Table 2 The commonly used motion control algorithm for aquaculture underwater vehicle
動態避障是水產養殖作業中另一項關鍵技術。水產養殖水下機器人在按照預規劃路徑開展養殖作業時,可能會遭遇養殖設施、產品及環境中的不確定動態障礙物,設計合理高效的動態避障策略,對于提升養殖作業可靠性和安全性而言非常重要。動態避障一方面依賴對養殖環境及對象的實時感知建模,另一方面取決于動態避障策略的優劣[75]。在養殖環境感知建模方面,可基于聲吶[76-77]、圖像[78]、視頻[79]等手段獲取的信息,建立養殖環境及障礙物模型。在避障策略研究方面,除傳統的人工勢場方法外,新興的動態避障算法可大體分為兩類:一類從水產養殖水下機器人的運動特性及限制出發[80],另一類采用神經網絡和模糊推理為代表的智能決策方法[81]。
盡管規劃與控制技術近年來取得了長足的進步,但對于水產養殖這種特殊的應用場合而言,現有的規劃與控制技術需要結合實際應用需求做出適應性調整及補償,尤其是需要充分考慮動態養殖產品、設施及未知復雜養殖環境的影響,提高作業的效率、安全性與可靠性。
2.6 多體耦合約束下水下機器人-機械手協同精準作業
搭載機械手的水產養殖水下機器人能完成除養殖監測外更復雜的作業任務,大大提升了水產養殖作業能力。但是,水下機器人與機械手構成了多體耦合的水下機器人-機械手系統(underwater vehicle-manipulator system,UVMS),建模與控制非常復雜[82]。
對于UVMS建模而言,需要在水產養殖水下機器人和機械手建模的基礎上,分析兩者間耦合關系并兼顧復雜養殖環境影響。常用的動力學建模方法包括Kane方法、Lagrange方法和Newton-Euler方法等。Kane方法所建方程數少,效率較高,但需計算各部分加速度以獲得慣性力;Lagrange方法從能量的角度出發構建模型,避開了力、速度和加速度等矢量的復雜運算,但要對能量方程進行繁瑣的偏導運算;Newton-Euler方法建模直觀,易于計算,但需要計算出系統所有相互作用力,相對繁瑣[83]。在建立理論模型后,還需通過數值計算或試驗的方式獲取UVMS的水動力系數。此外,對于水產養殖作業而言,養殖環境的分析與建模至關重要。在實際建模過程中,可通過歷史數據和離線信息首先建立養殖環境的名義模型,此后依據實際工作過程中的數據采集或狀態估計對名義模型進行在線修正,為UVMS的精準作業提供依據。
實現精準化水產養殖作業,UVMS必須具備穩定且高精度的運動控制、姿態調整及力控制能力。但是,UVMS具有時變、耦合、非線性、冗余等特點[84],高精度控制非常困難。尤其是當機器人處于懸停狀態時,UVMS控制必須同時處理養殖水體內復雜擾流及機械手反作用力擾動,精準養殖作業難度更大。UVMS通常有兩種控制方式:(1)將機器人和機械手視為兩個單獨系統,在單系統的控制過程中處理耦合作用的影響;(2)將機器人和機械手視為一個整體,設計整體運動控制策略。UVMS的控制算法主要包括滑模控制、模糊專家控制、神經網絡控制、模型預測控制等。Hachicha等[85]面向船體清潔任務設計了攜帶2只機械手的UVMS,克服了機器人清潔工況的不穩定影響,實現了姿態穩定控制。Heshmati-Alamdari等[86]提出了一種UVMS力/位置跟蹤控制方法,不需要依賴精確動力學、干擾及接觸剛度模型,具有良好的魯棒性。Londhea等[87]面向深海干預任務,提出了一種具有干擾估計功能的非線性模糊控制方法,實現了UVMS的任務空間魯棒控制。
此外,為避免在抓取過程中對魚類等軟體水產生物造成傷害,水產養殖水下機器人所搭載的機械手也應進行特殊設計。采用柔性機械手是一種良好的解決方案[88-89]。相較于傳統的剛性機械手,柔性機械手多采用液態金屬、橡膠等軟體材料,或采用多指抓取、類章魚觸手卷曲抓持和基于負壓變形的薄膜抓持等結構形式。Ilievski等[90]研制了一種新型6指軟體機械手,主要用于生物化學領域,具有良好的柔順性、適應性。Wang等[91]設計了一種全部采用軟體材料3D打印技術制作的3指軟體機械手,提出了手指彎曲變形的動力學模型,并進行了抓取實驗。然而,柔性機械手在夾持水產品的過程中可能面臨很多問題:軟體材料在應力、壽命和撕裂強度等方面的性能難以滿足頻繁、長期使用的需求;柔性軟體機械手在夾持水產品時,可能會產生柔性變形,很難建立精確的模型;柔性結構、負載變化等對抓取性能影響十分明顯,可能會產生水產品抓取不穩定的現象。因此,如何兼顧抓取的準確性、可靠性及安全性將是柔性機械手設計中必須解決的問題。
3 展 望
近年來,水下機器人飛速發展,且由于其突出的裝備與技術優勢,在水產養殖業中有著廣闊的應用空間。但是,目前受限于成本、裝備適用性等問題,水產養殖水下機器人的應用仍十分有限。未來,在養殖監測及作業方面,水產養殖水下機器人還有很多問題亟待解決。具體表現在如下方面:
1)養殖環境智能綜合感知。現有的水產養殖監測手段單一、可靠性低、靈活性差。基于水下機器人、無人機、傳感器節點和物聯網等技術,構建立體式綜合探測網絡,從空中、水面、水下三個方向,運用定點與巡檢、遙測與接觸式測量等多種手段,實現養殖環境的智能綜合感知,將是未來的重要發展方向。
2)養殖對象生理及行為特征提取與辨識。水產養殖水下機器人搭載聲吶、激光等多種探測設備,借助聲、光、電等多元手段,采用模式識別與人工智能算法,實現養殖對象種類、數量、體質量、尺寸、姿態、移動軌跡和空間分布等特征的提取與辨識,可為水產養殖環境調控與作業提供良好的依據。
3)可靠、低成本的智能化裝備。目前水產養殖水下機器人成本仍然相對偏高,普通水產養殖戶難以接受,制約了其在水產養殖業中的推廣應用。大力發展低成本的成熟模塊以及提升裝備集成水平,將是建造可靠低成本的智能化裝備的關鍵措施,也是未來在水產養殖業中推廣的重要方向。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
電子制作(2018年14期)2018-08-21 01:38:16
故事大王(2016年7期)2016-09-22 17:30:08
水利規劃與設計(2016年7期)2016-02-28 15:06:27
河南科技(2014年23期)2014-02-27 14:19:07