機電作動系統(tǒng)故障檢測方法評估
2021-06-10 02:59:34賈海文
粘接 2021年1期
賈海文

摘要:機電作動系統(tǒng)屬于非線性、多變量、強耦合的系統(tǒng),針對該系統(tǒng)同種故障表現(xiàn)下不同故障模式設計了故障檢測方法,通過故障檢測率,誤報警率,魯棒性等指標對固定閾值和自適應閾值的故障檢測系統(tǒng)進行了評估。最后基于機電作動系統(tǒng)三閉環(huán)Simulink模型,驗證了評估方法的有效性。
關鍵詞:EMA;故障檢測;故障檢測方法評估
中圖分類號:V242.5 文獻標識碼:A 文章編號:1001-5922(2021)01-0118-05
隨著機電作動系統(tǒng)(EMA)的應用,去除了飛機上大量的液壓回路,有利于飛機維修和減輕了飛機重量。然而,新的故障和安全性的不足阻礙了EMA在主飛行控制執(zhí)行機構中的大量使用。依據(jù)Moog公司提供的故障模式,影響和關鍵性分析(FMECA故障模式及影響分析)信息、美國軍方發(fā)布的工業(yè)信息和執(zhí)行器相關故障文獻追蹤,將機電作動系統(tǒng)故障模式分為:傳動機構故障、驅動電機故障和傳感器故障。
針對以上故障模式,國內外學者分別基于不同方法進行了故障檢測。2016年Ismail M A,Balaban E等人提出了一種新的基于振動的混合技術,用于檢測EMA滾珠絲杠卡阻和滾珠碎裂故障,主要是通過比較絲杠健康理論值與EMA測試臺實驗值進行比較。從而判斷故障是否發(fā)生。Chirico等人研究了基于EMA的“數(shù)據(jù)驅動故障檢測技術”在EMA滾珠絲杠中設置兩種不同剝落尺寸的剝落斷層,使用貝葉斯分類器通過振動和電流兩個條件指標來識別故障。Ismail等人開發(fā)了基于EMA的故障檢測和量化技術,直接檢查在測試臺上收集的振動數(shù)據(jù),以確定和表征健康狀況,確定對振動數(shù)據(jù)執(zhí)行高分辨率角度重采樣(以消除速度波動)使得可以檢測和測量EMA滾珠軸承中的剝落的嚴重性。然而,上述檢測方法雖然具有一定的有效性,但對各種擾動比較敏感,例如,操作條件,數(shù)據(jù)的擾動和傳感器的測量,將會限制其在航空航天領域的應用。
Romeral L,Rosero J A等人結合基于模型的故障檢測神經網絡技術與FFr分析技術,對電機繞阻短路故障和轉子靜態(tài)偏心故障進行檢測Ossmann D等人通過應用離散小波變換(DWT)—監(jiān)測PMSM(永磁同步電機)電流,來檢測和診斷電氣(短路:相與地之間或相與相之間)和機械(偏心)故障。雖然,傅立葉變換(STFT)等技術可以對不同的頻率和時間進行分析,但其僅適用于系統(tǒng)處于穩(wěn)態(tài)的時候。而在真實飛行狀態(tài)中,EMA工作在一個非穩(wěn)態(tài)環(huán)境中,所以在檢測時只能依賴于小波分析。然而基于信號處理的方法在飛機上的應用誤報警率比較高。針對EMA傳感器故障,Wang J等人設計了一種基于z檢驗的故障檢測程序來實現(xiàn)角位移傳感器的自我診斷,并且通過卡爾曼濾波估計調整解算器的不匹配故障來實現(xiàn)故障調節(jié),但并沒有考慮噪聲和外部干擾。2009年Balaban E,Saxena A等人研究了傳感器的不同故障模式,并設計了基于人工神經網絡(ANN)的診斷系統(tǒng)。該方法不僅可以檢測各種故障模式,而且可以區(qū)分傳感器和系統(tǒng)故障。最后通過在機電作動器已有的實驗數(shù)據(jù)中注入偏置、漂移、縮放等故障模擬來檢測該方法的有效性。不足之處是,專家系統(tǒng)需要強大的數(shù)據(jù)支持和豐富的維修經驗,而機電作動系統(tǒng)在民機上的應用屬于—個全新的領域,使用時間和應用范圍有限,所以基于專家系統(tǒng)故障檢測方案還需要不斷的完善。
考慮國內外有關機電作動系統(tǒng)故障檢測,發(fā)現(xiàn)對檢測方法的評估研究相對較少。因此本文采用了未知輸人觀測器,把建模的不確定性、外部干擾和測量噪聲看作是系統(tǒng)的未知輸入,使其從殘差中完全解,并對自適應閾值與固定閾值兩種判定方法進行了評估。
1機電作動系統(tǒng)建模與故障建模
本文所研究的無刷直流電機為二相導通星形三相六狀態(tài)。
1.1電壓平衡方程
3故障檢測方法評估
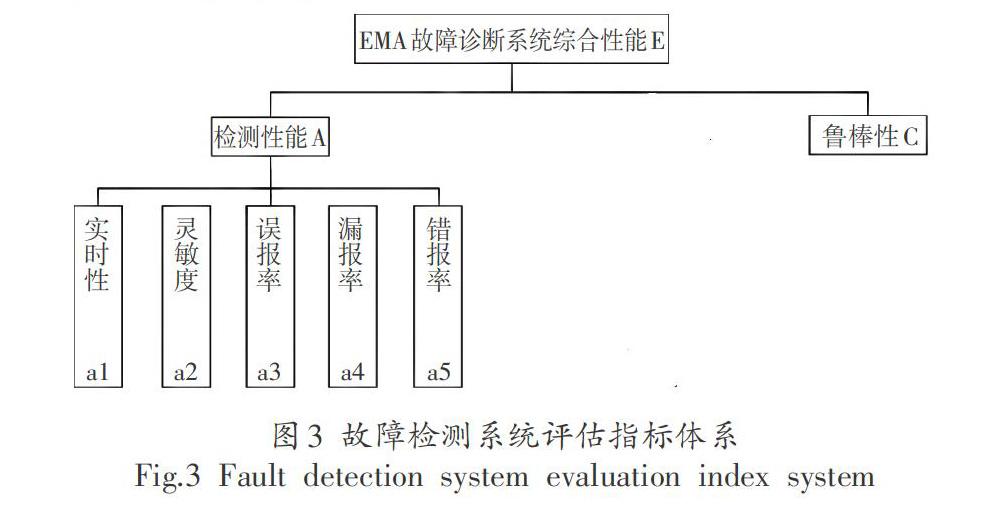
機電作動系統(tǒng)運行環(huán)境復雜,動態(tài)變化劇烈,一旦受損或者卡死,飛行品質會劇烈下降甚至墜機。因此,故障檢測系統(tǒng)的目標就是以最短的時間檢測出故障并且分離故障,給機組留出足夠的時間采取措施。因此,本節(jié)以檢測性能指標、診斷性能指標和魯棒性3大類指標作為標準,來評估上述故障檢測系統(tǒng)的性能。其結構如圖3所示:
實時性:指當系統(tǒng)發(fā)生故障時,故障檢測系統(tǒng)在要求的時間內,以盡量短的時間檢測到故障;靈敏度:指故障檢測系統(tǒng)對輕度故障的檢測能力;誤報率:指系統(tǒng)沒有發(fā)生故障,檢測系統(tǒng)卻報警;漏報率:指系統(tǒng)出現(xiàn)了故障,檢測系統(tǒng)卻沒有檢測出來;錯報率:故障定位錯誤和報警時間錯誤;魯棒性:指檢測系統(tǒng)在存在噪聲、干擾和建模誤差的情況下,還能保持滿意的實時性、誤報率和漏報率等性能指標。
上述指標分別從不同的方面對故障檢測系統(tǒng)做出了評估,然而對于不同類型的系統(tǒng),這些指標偏重程度是不一樣的,比如飛控機電作動系統(tǒng),實時性和分離能力是故障檢測系統(tǒng)的關鍵所在。所以在利用上述指標對故障檢測系統(tǒng)進行性能評價時,要明確哪些性能是主要的,哪些是次要的。本節(jié)利用權重來評估每個指標相對于總體性能作用大小的量化值,但是確定權重又有一定的難度,因為他們不但包含有評估客體因素還包括評估主體因素,因此,一個指標的重要程度主要受下列4種因素影響:①評估組織者對該指標的重視程度;②該指標值所反映的信息量;③指標間的相互影響;④該指標評估結果的可靠程度。
常用的系統(tǒng)評估指標量化方法有:體操計分法、兩兩比較法、自頂向下法等。本節(jié)采用兩兩比較法來確定各個指標的相對權重,構造如表1所示的評估指標相對重要性判斷表。
魯棒性的權重之所以比較大,是因為一種故障檢測算法,即使檢測性能再好,如果對建模誤差和外界干擾沒有魯棒性,就失去了實際工程價值。飛控機電作動系統(tǒng)是多變量、強耦合的機電一體化復雜系統(tǒng),由于安裝調試誤差、制造工藝等因素的影響,在系統(tǒng)建模時總會出現(xiàn)建模誤差,再加上飛機飛行環(huán)境的復雜性,因此魯棒性成為了最重要的性能指標。
4各評估指標量化值
對于圖3中的各評估指標,如漏報率、誤報率這樣的指標容易給出定量結果;但在大多數(shù)情況下,像魯棒性、實時性和靈敏度很難給出一個定量的描述,只能給出定性評估結果。因此,在這里對定性指標進行量化,結果如表2所示。
在比較魯棒性這一指標時,設置相同的噪聲及建模誤差,分別應用于固定閾值和自適應閾值兩種判別方式上進行比較,來判定哪種方式的魯棒性好。針對上述其他指標評估時,以傳感器偏置故障為例,采用計算機仿真方法在一定時間內隨機注人不同程度的故障,從而得到相應的故障檢測率。由圖4所示,可以看出輸人故障數(shù)大于200時故障檢測率穩(wěn)定于90%左右。因此下文選取故障數(shù)為350來計算其余指標。
系統(tǒng)疊加的噪聲是分別是信噪比(sNR)為5、6、7的高斯白噪聲。各指標評估結果如表3~5所示。
5綜合評估結果
通過上小節(jié)固定閾值和自適應閾值在不同噪聲環(huán)境下的對比結果可以看出,自適應閾值在檢測率、靈敏度方面明顯優(yōu)于固定閾值;實時性能變化不明顯;基于上述分析的評估結果如表6所示,該表內容是對比意義下的結果,沒有絕對性。
6評估結果分析
由以上分析結果可以得出,當系統(tǒng)疊加信噪比為5的高斯白噪聲時,固定閾值的檢測率達到90%左右,相比自適應閾值而言設計上容易實現(xiàn)。但是隨著的信噪比值的增加,漏報率從9%增加到了42%,檢測性能下降嚴重,無法平衡漏檢率和誤報率,致使其綜合性能值不高僅為4.96。相比而言,采用自適應閾值代替固定閾值,檢測性能各指標明顯優(yōu)于固定閾值,評價分數(shù)升為12,隨著信噪比值的增加,檢測性能各指標也有一定的下降,其中漏報率增加較明顯,但相對緩慢,所以其總體性能值為6.4>4.96,相對固定閾值不足之處為設置相對復雜,且閾值計算效果比較依賴殘差的敏感度。因此,自適應閾值相比固定閾值可以同時兼顧檢測率與虛警率,且對外界擾動具有一定的抗干擾能力,但是在自適應閾值的設計上需要額外設計一個殘差生成器且需要對殘差進行區(qū)間估計,所以自適應閾值的好壞與系統(tǒng)動態(tài)模型的精度密切相關。相比而言固定閾值的選取更加簡單,只需要通過觀察正常狀態(tài)殘差的最大值即可,省去了系統(tǒng)建模,對于復雜系統(tǒng)在工程上更容易實現(xiàn)。