基于動態貝葉斯網絡的無人戰車目標威脅評估*
2021-06-11 00:52:44劉詩瑤習朝輝程春陽梁百川姜明霞
火力與指揮控制 2021年4期
劉詩瑤,王 明,習朝輝,程春陽,梁百川,姜明霞
(北方自動控制技術研究所,太原 030006)
0 引言
隨著人工智能技術在軍事領域廣泛應用,世界軍事強國在地面無人自主系統裝備及技術領域保持高速發展[1],戰爭形態正在由機械化、信息化向智能化加速變革,智能無人系統作戰將成為一種新型作戰樣式主導未來戰場。無人戰車作為未來陸軍地面突擊的新質戰斗力量,需要具備自主作戰能力,而目標威脅評估是無人戰車完成自主作戰的重要環節。目標威脅評估是對戰場環境中敵方目標的威脅程度進行科學合理的評估,并給出威脅等級排序[2]。目標威脅評估具有復雜性、動態性、不確定性等特點,本質上屬于不確定性決策范疇。對于傳統的有人裝甲戰車,目標威脅評估主要是依靠車炮長乘員主觀評估,可能會由于作戰經驗、心理素質和生理條件等方面的原因導致評估不準確。對于未來的無人裝甲戰車,目標威脅評估迫切需要通過人工智能技術來實現。相比于空中戰場和海上戰場,陸戰場地形更加復雜,環境不確定性更高。如何在高動態環境、強博弈對抗條件下實現對無人戰車目標威脅評估具有很大挑戰性。
目前,目標威脅評估方法可以分為兩大類[3]:一類是基于數學解析模型的定量方法,如對策論、多屬性決策方法等,優點是計算簡單[4],缺點是評估模型完全依靠人工構建,受人為主觀因素影響大;另一類是基于人工智能的推理方法,如人工神經網絡、貝葉斯網絡(BN)[5-6]等,優點是適用于處理不確定性決策問題,目前已有部分研究將貝葉斯網絡應用于空中作戰目標的威脅評估。對目標威脅評估的研究主要集中于空中戰場[7-8]和海上戰場,對陸戰場的目標威脅評估研究較少,且大多是靜態目標威脅評估。由于靜態目標威脅評估方法受當前時刻的觀測精確度影響較大,錯誤的觀測信息會對評估結果造成較大誤差,因此,亟需研究動態目標威脅評估方法。
由于動態貝葉斯網絡可以克服靜態評估帶來的主觀性和不確定性,更適用于高動態、強對抗的無人戰車作戰環境,因此,本文提出一種基于動態貝葉斯網絡的無人戰車目標威脅評估方法。首先選取目標特征并進行模糊處理,其次基于靜態貝葉斯網絡(SBN)建立用于威脅評估的推理模型,然后根據動態貝葉斯網絡(DBN)理論對推理模型在時間維上進行擴展,建立動態推理模型,最后結合算例進行仿真驗證,并將仿真結果與SBN 推理結果進行比較。
1 無人戰車目標威脅評估流程
無人戰車目標威脅評估是一個較為復雜的問題,目標的威脅程度主要由目標進行的作戰任務及目標特性決定,在作戰過程中,根據傳感器提供的目標信息,在目標態勢感知的基礎上進行威脅評估。威脅評估問題的本質是不確定性決策問題,傳統的威脅評估方法由于對戰場態勢信息運用不充分,隨意性較大,因而很難保證決策結果的正確性。貝葉斯網絡以概率理論與圖論為數學基礎,能夠很好地解決不確定性問題。
利用貝葉斯網絡進行地面目標威脅度評估的基本流程圖如圖1 所示。

圖1 基于貝葉斯網絡的威脅評估流程圖
首先對目標進行特征提取并對獲取的目標特征進行模糊劃分,其次根據獲取的目標特征之間的關聯關系建立其SBN 模型;然后設計不同時間片間的轉移概率,將網絡擴展為DBN;再次基于貝葉斯公式和聯結樹算法進行推理;最后獲取觀測節點狀態的概率分布情況,根據判決規則,輸出目標的威脅程度估計結果。
2 目標特征信息獲取與模糊處理
運用貝葉斯網絡方法進行目標威脅評估,需要獲取合理的目標特征信息以構造貝葉斯網絡的證據節點,并對目標特征信息進行模糊處理得到其對應狀態的隸屬度。
2.1 目標特征信息獲取
目標對無人戰車的威脅度主要取決于主觀上對我是否具有打擊意圖和客觀上具備的打擊能力兩方面。其中,目標打擊意圖需要通過對目標的類型、所攜帶的武器種類、武器性能、火力指向、打擊狀態等作出判斷;打擊能力由目標自身的火力打擊能力、敵我相對距離、我方無人戰車的防護角度等決定。
基于上述分析,本文采取目標類型、武器種類、火力指向、防護角度、攻擊狀態、目標速度、目標距離等7 個目標特征信息來建立面向無人戰車的目標威脅評估模型。
2.2 目標特征信息模糊處理
利用貝葉斯網絡進行推理,需要將特征信息轉化為對應的各個狀態變量的概率值。本文利用模糊數學的方法,對各個節點的狀態變量進行模糊分類,并且利用隸屬度的方法對觀測證據進行估算。例如,對于目標速度v 將其劃分為高速、中速與低速3 種狀態,其對應的隸屬度函數為

圖2 目標速度的模糊隸屬函數圖
3 動態貝葉斯網絡構建
運用貝葉斯網絡進行威脅評估的關鍵是構造網絡結構,即根據目標特征建立評估體系。本節首先建立SBN 結構,然后考慮時間特性,將其擴展為DBN。
3.1 靜態貝葉斯網絡模型構建


圖3 典型的SBN 圖

式中,

即α 為歸一化因子,由X 的父節點與子節點共同確定。
綜合分析各特征屬性,得基于SBN 的地面目標的威脅評估模型結構圖G 如圖4 所示。
3.2 動態貝葉斯網絡模型擴展
SBN 未考慮連續時間因素的影響,難以準確評估動態作戰目標的威脅度;而DBN 將SBN 在時間維上進行拓展,能夠根據多個時刻的觀測值對某一具體時刻的狀態進行評估,因此,評估結果更具合理性。
4 仿真驗證
本節通過設計仿真算例來驗證所提方法的有效性,并將DBN 評估結果與SBN 評估結果進行對比分析。
4.1 對比試驗
本仿真以7 個敵方目標為例,我方無人戰車對敵方目標持續觀測了3 個時間段,得到了每個時刻的證據,目標觀測值如表1 所示。
根據建立的觀測特征指標體系,確定各個節點的狀態集合如下頁表2 所示。

圖5 基于DBN 的威脅評估模型

表1 目標觀測值
表2 節點狀態集合表
根據表2 的狀態集合,以及建立的DBN 結構圖,并根據專家知識,建立條件概率表(CPT)。本文以威脅度(T)、作戰能力(E)、目標意圖(I)3 個網絡節點的條件概率表為例進行說明,如表3 所示。

表3 T、E、I 之間的條件概率表
設置相鄰時間片之間的轉移概率,以節點威脅度(T)為例,如表4 所示。
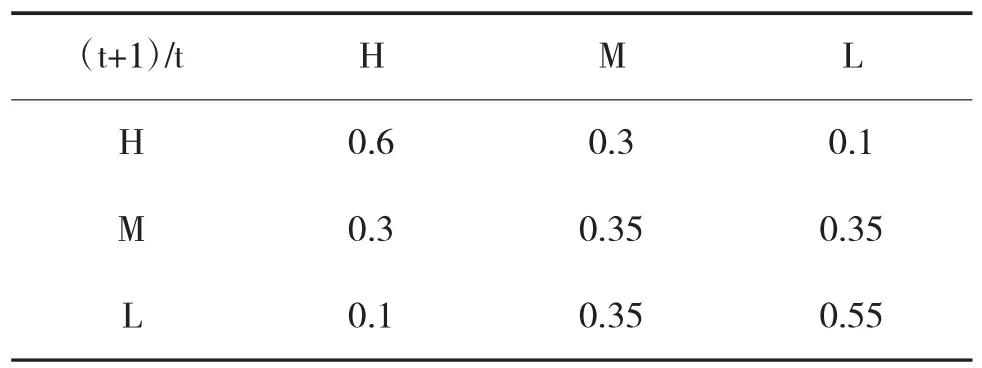
表4 節點T 不同時間片間的轉移概率表
以初始的條件概率表作為先驗概率,利用聯結樹算法[9]進行BN 推理,利用梯度下降法對網絡進行訓練,并考慮不同時間片間的轉移概率,得到地面目標的DBN 推理結果,見表5。
對于敵方目標1,不同時間片的推理結果見圖6。
考慮使用SBN 進行威脅評估推理,即不考慮相鄰時間片間的轉移概率,得到目標1 的威脅評估推理結果如下頁表6 所示。對比兩種推理結果中威脅度評估為高的情況,見圖7 所示。

表5 地面目標的DBN 推理結果

圖6 敵方目標1 的威脅評估推理結果
4.2 結果分析
針對目標1 的兩次推理,依次采用了DBN 和BN 方法。從實驗結果中可以看出,DBN 推理出的威脅評估判定為高的概率更大。通過對比可以發現利用DBN 進行威脅評估推理可以提升推理結果的準確率。

表6 目標1 的BN 推理結果

圖7 敵方目標1 的SBN 推理和DBN 推理的對比
從魯棒性的角度來說,如果目標1 在第3 次觀測時,出現錯誤的觀測信息。得到目標速度(V)的觀測值為(0.72,0.15,0.03),而實際情況是V=(0.32,0.61,0.07),這時根據DBN 的推理算法,得出的推理結果為(0.80,0.16,0.04),根據SBN 的推理算法,得出的推理結果為(0.73,018,0.09),雖然兩種推理方法得到的威脅評估推理結果都為高,但DBN 的推理結果表示威脅為高的概率更大,說明DBN 推理能得到較正確的評估結論。這表明與SBN 相比,DBN 對錯誤觀測信息有較強的濾波性能,魯棒性較高。
5 結論
本文提出了一種地面無人作戰系統中評估地面目標威脅的新方法,即充分考慮戰場作戰因素,選取目標特征并進行了模糊處理,使用BN 方法建立了針對地面作戰目標的威脅評估模型,并根據DBN 理論對模型進行拓展,建立了基于DBN 的威脅評估模型。最后結合算例進行了仿真,將基于SBN 和DBN 兩種方法的推理結果進行了比較,表明基于DBN 的威脅評估準確率高、魯棒性強,更適用于高動態強對抗的地面作戰實際戰場環境。下一步的研究工作將進一步優化目標特征信息的評價體系,并進行目標威脅評估的軟件實現以及與無人戰車的聯合仿真,實現目標威脅評估方法的實際應用。