瞄準線穩定精度試驗方法研究*
2021-06-11 00:52:24陳小軍張正成
火力與指揮控制 2021年4期
陳小軍,胡 杰,2★,張 瑜,張正成
(1.中國兵器工業試驗測試研究院,陜西 華陰 714200;2.西安工業大學機電工程學院,西安 710021)
0 引言
瞄準線穩定精度是觀瞄儀的一個重要性能指標,是武器裝備動態跟蹤和瞄準性能的綜合體現,直接影響著武器裝備的動態打擊精度[1]。瞄準線穩定精度目前的試驗方法主要有兩種,一種為野外實測法,一種為模擬試驗法[2]。野外實測法試驗條件難以控制,易受氣象、地面環境、載車駕駛人員駕駛水平等因素影響,導致試驗成本高、周期長。模擬試驗方法和野外試驗法相比,試驗條件可控、效率高,在目前觀瞄儀的工廠、研究所的交驗和科研試驗中被廣泛應用。模擬試驗方法目前主要有兩種:一種為通過陀螺儀傳感器采集電壓信號計算角度值,該方法會引入系統噪聲,導致測量精度下降,測試結果不直觀,不利于現場分析[3];第二種為CCD 攝像頭采集視頻圖像處理計算角度值,該方法為間接采集觀瞄儀瞄準線圖像方法,同時在測試系統中額外引入了CCD 攝像頭,在一定程度改變了觀瞄儀自身狀態,引入誤差。
本文提出了一種基于圖像處理的瞄準線穩定精度試驗方法,利用Matlab 對試驗數據進行了分析,給出了異常數據處理和數據擬合的方法和計算步驟,提高了瞄準線穩定精度計算的效率和精度,為觀瞄儀的性能評判和改進提高提供了有力的方法支撐。
1 試驗系統組成
試驗系統主要包括觀瞄儀、三軸轉臺、平行光管(含配套的分劃板)、視頻記錄處理裝置等。
試驗時將觀瞄儀安裝在三軸轉臺上,調整平行光管位置,使其正對準觀瞄儀瞄準鏡,從觀瞄儀讀取視頻圖像信號,傳輸至視頻記錄處理裝置。按照試驗要求給三軸轉臺輸入振幅、頻率、時間等驅動參數,啟動三軸轉臺,用視頻記錄裝置采集視頻圖像,系統組成見圖1 所示。
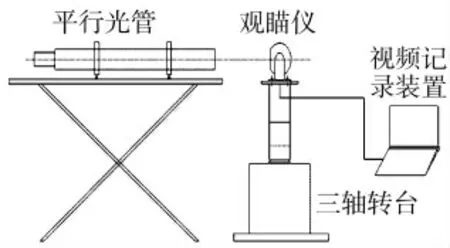
圖1 試驗系統示意圖
2 數據處理步驟及方法分析
2.1 數據處理步驟
第1 步,通過視頻記錄處理裝置將視頻圖像轉換成一幀一幀的圖片,處理出來的圖片如圖2所示。
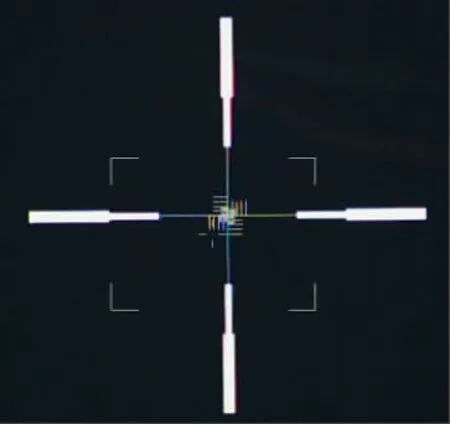
圖2 由瞄準線視頻轉化的圖片
第2 步,測量每幀圖片中瞄準線十字中心和分劃十字中心在方向和俯仰上的偏差值。該步驟主要是通過測量兩個十字之間的像素個數,并通過式(1)、式(2)將像素值轉化為對應的角度值。

式中:α0(k)、β0(k)為第k 點方位向和高低向偏差值,mil;nαk、nβk為第k 點方位向和高低向的像素個數;θ 為分劃板最小刻度值,mil;nˉ0為分劃板最小刻度間的像素個數。
第3 步,以第一幀圖片的瞄準線十字作為坐標原點,后續圖片中瞄準線十字坐標和它做差,得到瞄準線在方位向和高低向隨時間變化的偏差曲線α(i)、β(i)。
第4 步,根據偏差曲線擬合出漂移曲線αp(i)、βp(i),如圖3、圖4 所示。
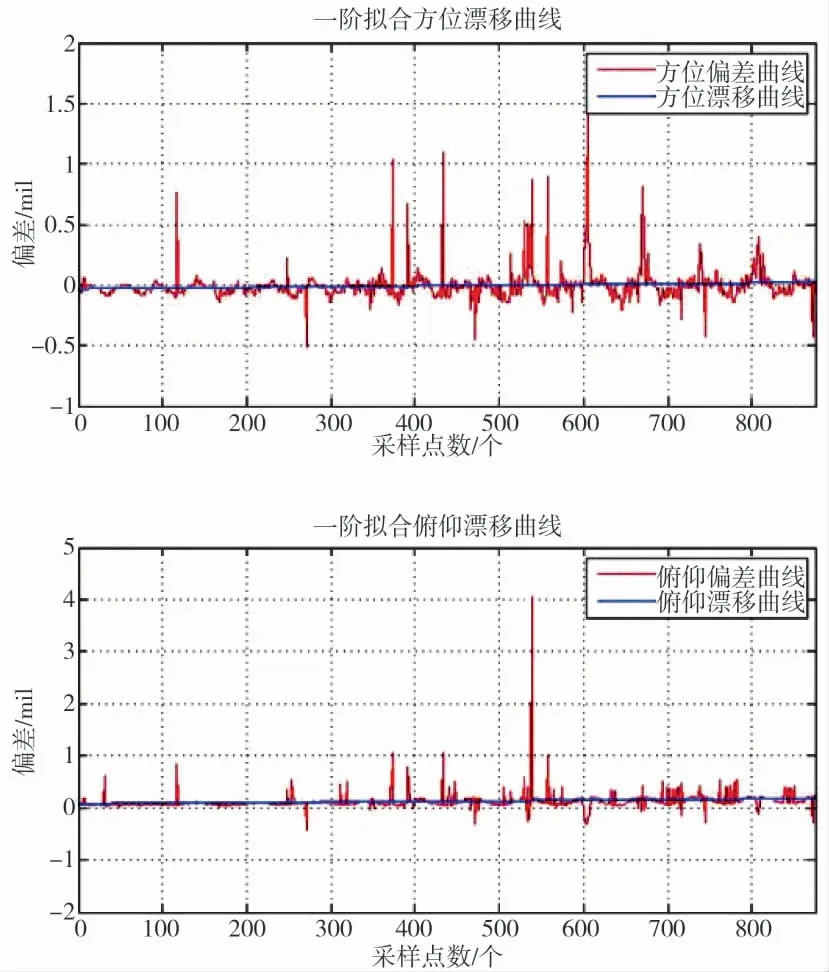
圖3 一階擬合偏差曲線和漂移曲線
第5 步,按照式(3)、式(4)[4]計算瞬時穩定誤差。

式中:α(i)、β(i)為單次第i 點方位向和高低向偏差值,mil;αp(i)、βp(i)為單次第i 點方位向和高低向漂移差值,mil;Δα(i)、Δβ(i)為單次第i 點方位向和高低向穩定誤差,mil。
第6 步,按照式(5)~式(10)得到觀瞄儀的穩定精度,計算結果見表1 所示。
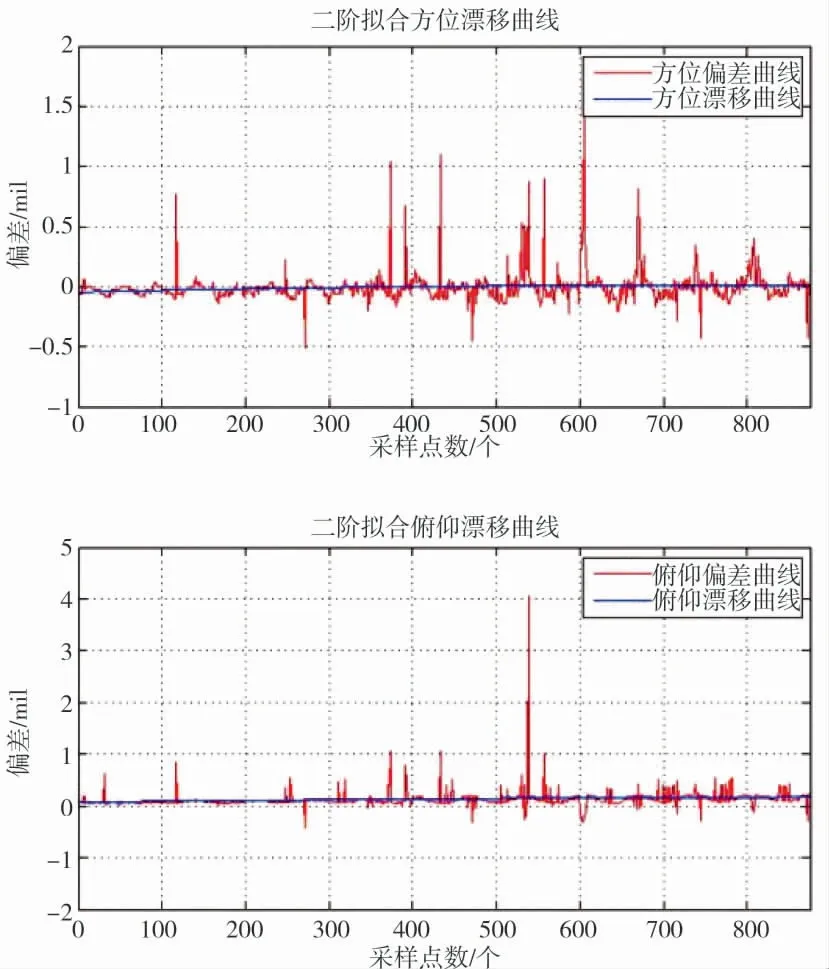
圖4 二階擬合偏差曲線和漂移曲線
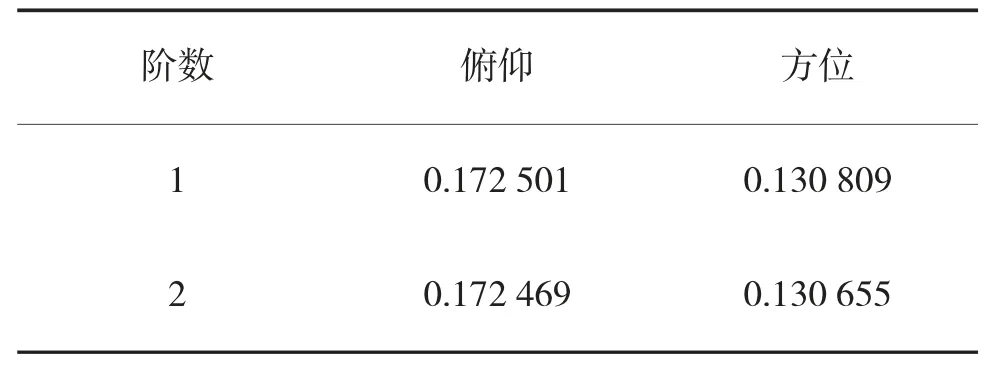
表1 一、二階擬合計算觀瞄儀穩定精度


2.2 數據處理方法分析
2.1 節中描述了從視頻圖像到試驗結果的一般數據處理流程和方法,但其計算過程中并未對原始采樣數據進行濾波,在漂移曲線擬合的過程中也未明確擬合方法,因此,試驗結果存在較大的誤差。下面將從3 個方面對數據處理方法進行分析。
2.2.1 物理特性分析
觀瞄儀是武器火控系統的隨動部件,根據其設計原理可知,觀瞄儀工作時其瞄準線十字中心應該始終瞄準打擊目標中心,當其十字中心偏離打擊目標中心時,火控系統會將其拉回并重新瞄準目標中心[5]。通過對采集到的俯仰和方位信號計算其角度偏差均值,方位均值為0.006 129 mil、俯仰均值為0.085 073 mil,可以看出不論是在方位還是在俯仰上,觀瞄儀工作狀態在物理學上屬于簡諧機械振動[6]。
2.2.2 異常數據處理
從方位和俯仰偏差曲線可以看出,曲線中存在一些非常尖銳的峰值,三軸轉臺的振動頻率和振幅是根據坦克裝甲車輛運動特性設置的,其頻率一般不大于3 Hz,振幅不大于3 °,觀瞄儀瞄準線十字隨時間變化的偏差曲線α(i)、β(i)應該是連續的,不應該出現巨大的跳躍。說明采集到的數據受傳感器自身測量原理約束,原始數據存在雜波干擾。因此,需要對視頻圖像處理出來的方位向和高低向的角度偏差數據進行濾波降噪[7]。采用移動平均濾波器對原始數據進行濾波去噪,根據奈奎斯特采用定理,選取移動平均濾波器的窗寬為6,對原始數據新進行濾波降噪處理。
2.2.3 擬合及結果輸出
計算上述降噪后的方位向和高低向的角度偏差數據的均方誤差MSE,用以評價其數據的變化程度,MSE 值越小,則預測模型對實驗數據的描述越精確[8]。采用Matlab 編程實現最小二乘法進行數據擬合[9],其一階、二階擬合后計算其MSE 值見表2:
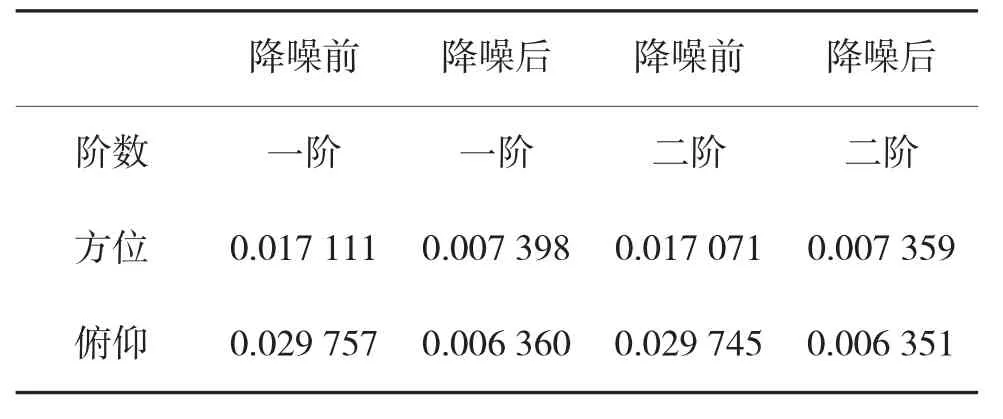
表2 降噪前后角度偏差數據的MSE
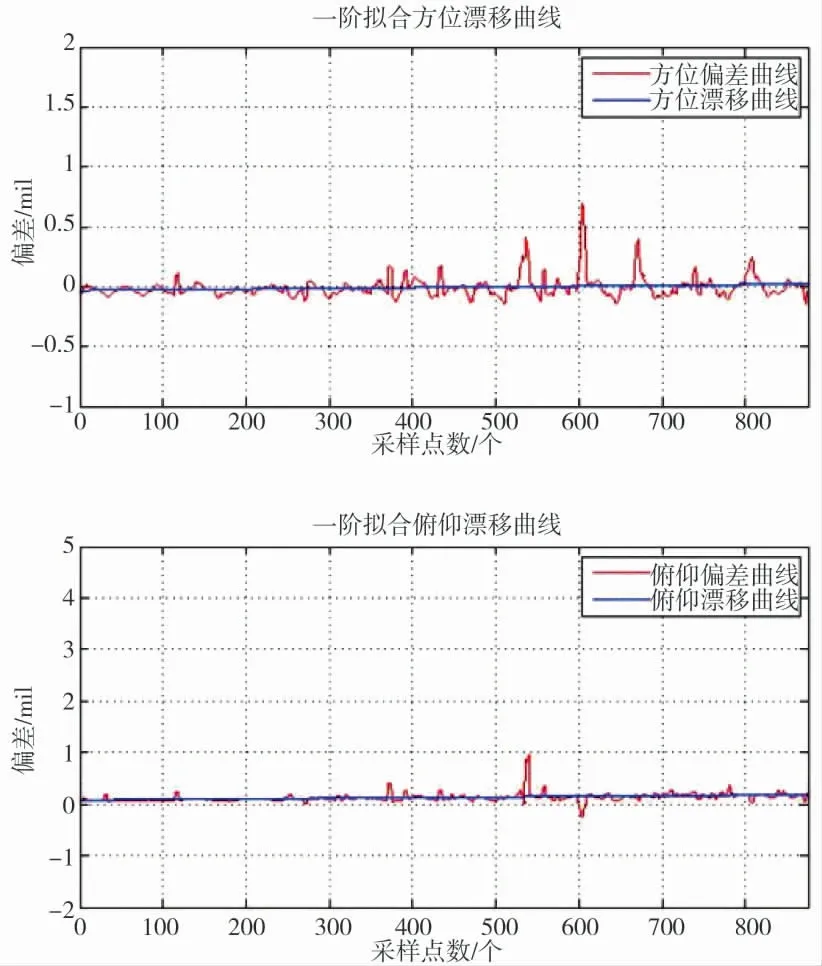
圖5 濾波降噪后一階擬合偏差曲線和漂移曲線
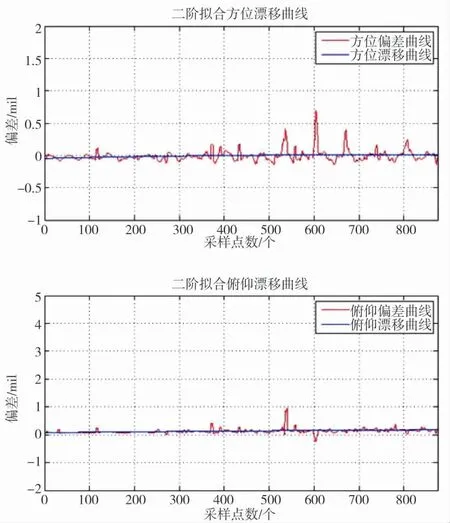
圖6 濾波降噪后二階輸出偏差曲線和漂移曲線
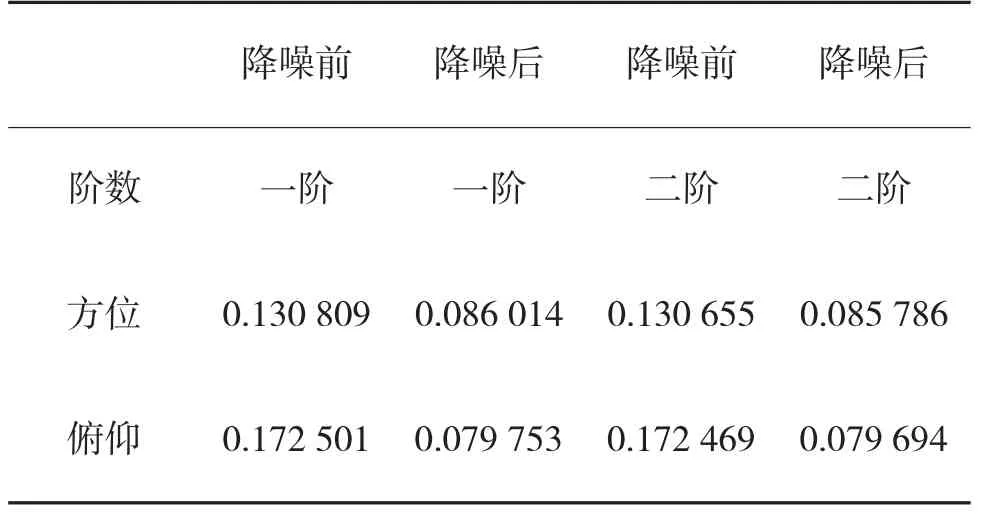
表3 瞄準線穩定精度
通過計算對比,降噪后無論是俯仰還是方位的MSE 值均小于5‰,說明可以利用最小二乘法對數據進行最佳數據擬合,采用matlab 工具實現移動平均濾波降噪,并擬合畫出偏差曲線和漂移曲線如圖5、圖6 所示[10]。
最終計算的瞄準線穩定精度結果輸出如表3所示。
3 結論
綜上所述,本文提出的瞄準線穩定精度試驗方法和給出的數據處理方法,在靶場多個型號裝備的科研試驗過程中得到充分驗證,與之前的試驗方法相比,結果直觀,能夠有效提高計算效率和精度,為觀瞄儀的性能評判和改進提高提供有力的方法支撐。
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
當代化工研究(2016年9期)2016-03-20 16:22:13
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22