基于深度學習的自組織態勢感知與決策系統*
2021-06-11 00:52:04李曉婷孟云霞
火力與指揮控制 2021年4期
李曉婷,賈 婧,孟云霞
(北方自動控制技術研究所,太原 030006)
0 引言
巡飛彈是集無人機技術和彈藥技術為一體的一種新概念彈藥,不僅能夠實現戰場偵察與毀傷評估,還能實現高精度打擊、目標指示、空中警戒等多種作戰功能,巡飛彈獨特的巡飛能力不僅對于攻擊坦克集群、運輸車等動態目標具有很強的戰場靈活性和適應性,還可根據戰場需求大大縮短從發現到摧毀目標的時間,提高作戰效能,而且對敵方機場、指揮所、港口、供應站等靜態目標也具有十分重要的作用[1]。如何將自組織態勢感知與決策系統變得“會理解、會思考、會決策”,實現自主化、智能化是未來戰爭中巡飛彈武器充分發揮其作戰能力的關鍵所在。因此,推進目標識別、自主決策等關鍵技術研究,是自組織態勢感知與決策系統建設面臨的重要問題。
本文結合以深度學習技術為代表的人工智能最新研究成果,研究基于巡飛彈武器平臺的自組織態勢感知與決策系統組成和應用模式,提出基于深度學習的目標識別模型、任務自主決策模型和任務分配模型,實現協同作戰任務自主決策和智能規劃。提高復雜環境下情報信息的獲取、處理、分析以及可視化能力;提高自組織態勢感知與決策系統復雜環境下的作戰任務決策速度以及任務規劃能力,從而提高系統數據化快速決策及協同作戰能力,最大限度地發揮巡飛彈武器平臺協同作戰效能。
1 自組織態勢感知與決策系統組成
自組織態勢感知與決策系統,由協同目標識別子系統、態勢感知子系統、作戰任務自主決策子系統、協同作戰任務規劃子系統、線下深度學習子系統,以及決策支撐模型算法庫和數據支撐專業數據庫組成。
協同目標識別子系統依賴深度學習目標識別模型完成光測/雷測影像預處理、目標特征提取、特征融合、目標識別、目標定位,以及目標融合等功能。態勢感知子系統完成戰場態勢感知、態勢綜合等功能。作戰任務自主決策子系統依賴作戰任務自主決策模型完成目標威脅分析、目標動向預測,以及作戰任務自主決策等功能。協同作戰任務規劃子系統依賴于作戰任務方案模型及任務規劃模型庫等,采用分布式架構,進行態勢數據驅動的協同部署、目標數據驅動的協同任務分配、數據驅動的時域/空域協同沖突檢測及規劃動態調控等功能,并生成多巡飛彈武器平臺協同作戰任務指令。當感知到戰場情況發生較大變化時,態勢感知可將戰場態勢信息及動態環境反饋輸入至協同作戰任務規劃子系統,協同作戰任務規劃子系統,根據戰場實時態勢及動態環境進行實時任務重分配和規劃調控。態勢可視化子系統對敵我力量部署、戰場形勢,以及彈載編隊的任務分工等進行直觀的展現。決策支撐模型庫包括知識庫、深度學習目標識別模型庫、作戰任務自主決策模型庫、任務規劃模型庫,主要為復雜環境下深度目標識別、基于深度學習的作戰任務自主決策,以及多巡飛彈武器平臺協同作戰任務規劃[2]提供模型算法支撐。數據支撐專業數據庫包括目標特征樣本庫、光測/雷測影像庫、巡飛彈武器平臺毀傷效能庫、訓練樣本庫以及綜合業務數據庫,主要為態勢數據驅動的協同部署、目標數據驅動的協同任務分配,以及數據驅動的時域/空域協同沖突檢測提供數據支撐。基于深度學習的自組織態勢感知與決策系統的組成如圖1 所示。
自組織協同態勢感知與決策系統的若干個子系統配合工作,自組織地完成多項任務[3]。基于巡飛彈的自組織算法如下:
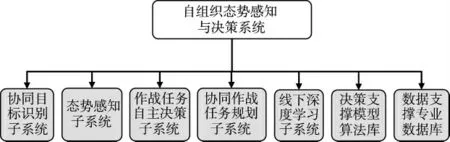
圖1 自組織態勢感知與決策系統組成圖
設集群中有N 個成員,各個巡飛彈的動力學模型有如下矩陣表達形式:

則基于自組織方法的協同控制問題有如下定義:在每個周期tc=t0+δc內,求解每個巡飛彈的理想速度矢量,其表達式如下:

權值應滿足如下關系:
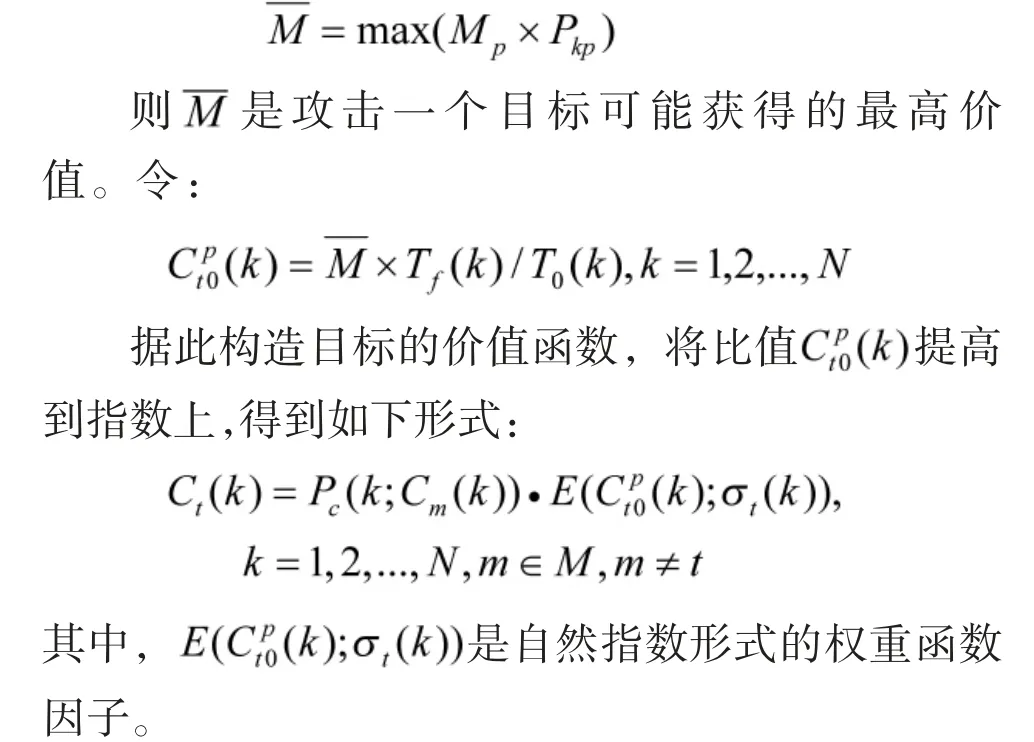
Ct代表追擊目標的權重系數,追尋不同的目標。Ct的表達式如下:

本文將目標價值和摧毀概率引入對目標攻擊的權值。設每個目標都有一個給定的價值Mp以及攻擊時被摧毀的概率Pkp。令:
2 自組織態勢感知與決策系統應用模式
系統應用模式分為線下訓練與線上應用兩種模式,線下訓練主要是指在戰前,通過線下深度學習工具(包括樣本訓練管理工具與模型訓練工具),依次完成訓練樣本的導入、目標識別/自主決策/任務規劃模型訓練、模型入庫等過程,使訓練后的目標識別/自主決策/任務規劃模型可以直接應用于線上巡飛彈武器平臺。而線上應用主要是指巡飛彈武器平臺的應用,具體包含以下幾個階段:
在目標識別與態勢感知階段,指揮員通過態勢感知子系統觀察在該階段生成的戰場態勢信息,對態勢進行分析與理解。
在作戰任務決策階段,區別于傳統輔助決策模式,指揮員不需要依次進行選定目標、確定作戰任務、確定攻擊條件、選定關鍵目標和選定目標關鍵點等多個過程的決策。通過作戰任務自主決策子系統,將自動生成針對每個目標的作戰任務,指揮員的工作只需要對生成作戰任務進行確認與調整。
在任務規劃階段,區別于傳統指揮員需要進行任務規劃的模式,指揮員不需要編制作戰方案的每個細節。通過協同作戰任務規劃子系統將自動生成作戰方案,指揮員的工作只需要對生成的作戰方案進行調整與確定。
在作戰執行與評估階段,指揮員主要對任務執行以及毀傷評估進行監控。
根據上述內容,將自組織態勢感知與決策系統應用于巡飛彈武器平臺,使指揮員從繁瑣的制定作戰任務及方案的細節中解脫出來,而將精力專注于更高層面的頂層決策上。
自組織態勢感知與決策系統應用視圖如下頁圖2 所示。
3 深度學習模型庫建立
通過在地面線下應用深度學習技術[4-5]訓練協同態勢感知與決策模型,然后將訓練好的模型部署到彈載線上系統中,分別完成深度目標識別[6]、任務自主決策[7]與任務規劃。
在深度目標識別模型地面線下學習階段,深度學習技術所需的訓練樣本,主要來自歷史采集的巡飛彈圖像數據與模擬生成的典型圖像數據,包括紅外傳感器[8]、可見光探測器[9]、雷達所探測的影像[10],并通過大數據集成引擎完成多源異構訓練數據集的集成與規格化。傳統用于目標識別所需的知識庫與目標特征庫用于對目標識別模型建模,形成初始目標識別模型。目標識別主要依據其識別對象的類型而獨立建模的,例如指揮所、雷達站等目標都需要建立其各自獨立的目標識別模型,因此,在對目標識別模型進行訓練時,其訓練集是依據其識別對象的類型而選取的,例如在對指揮所目標識別模型進行訓練時,需要選取所有包含了指揮所的影像訓練集。其次,需要對模型中的神經元的初始參數進行設置,并且選擇合適的訓練算法,以保證識別誤差達到理想狀態,并且訓練過程可以快速收斂。在目標識別模型訓練后,訓練后的模型可以直接應用于對目標的識別。
在任務自主決策模型[11]地面線下學習階段,深度學習技術所需的訓練樣本,主要來自巡飛彈的歷史作戰任務決策數據與典型仿真場景中的作戰任務決策數據,并通過大數據集成引擎完成多源異構訓練數據集的集成與規格化。作戰任務決策最終需要確定對目標的監視、跟蹤、打擊等作戰任務[12],因此,任務決策模型是依據其作戰任務的類型建立的,例如,監視決策模型、跟蹤決策模型等[13]。因此,在對任務決策模型進行訓練時,其訓練集也是依據其決策任務的類型而選取的,例如,在對監視決策任務模型進行訓練時,需要選取所有包含了監視決策任務的訓練集。其次,需要對模型中神經元的初始參數進行設置,并且選擇合適的訓練算法,以保證識別誤差達到理想狀態,并且訓練過程可以快速收斂。在任務決策模型訓練后,訓練后的模型可以直接應用于任務決策,將目標數據、敵情數據、我情數據及戰場態勢信息作為任務決策模型的輸入,可以得到該目標采取某種任務決策的概率,最終實現作戰任務自主決策。
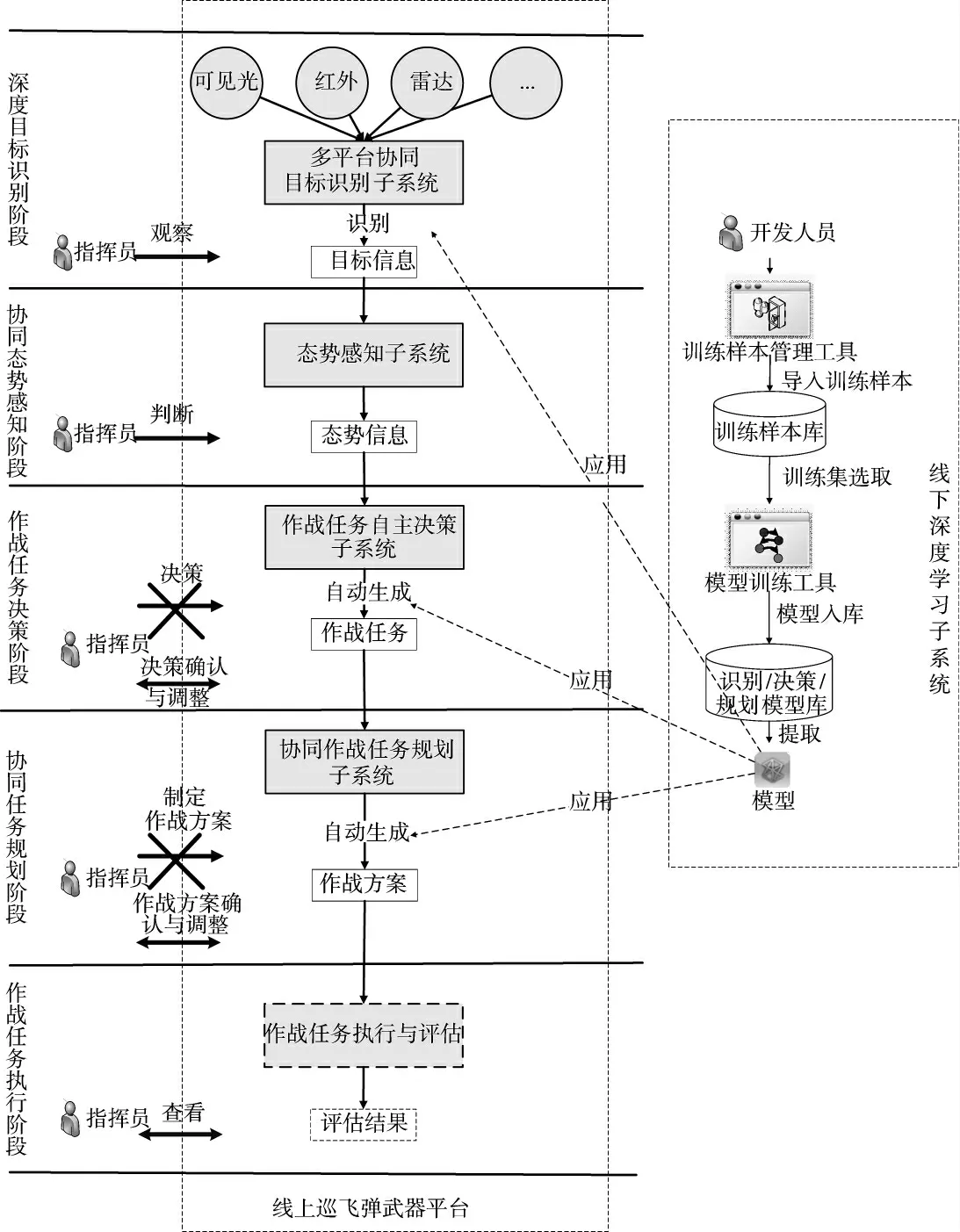
圖2 自組織態勢感知與決策系統應用模式
在任務規劃模型[14]地面線下學習階段,深度學習技術所需的訓練樣本,主要來自巡飛彈的歷史作戰任務方案與典型仿真場景中的作戰任務方案,并通過大數據集成引擎完成多源異構訓練數據集的集成與規格化。作戰任務規劃最終需要確定我方裝備的作戰任務,作戰任務包含了許多組成方面,其中最重要的是選擇最優的武器/協同武器來獲取最佳的殺傷效果,因此,建立的任務規劃模型是依據我方裝備的類型建立的[15],其訓練集也是依據我方裝備類型而選取的,例如,在對巡飛彈武器平臺任務規模模型進行訓練時,需要選取所有包含了該巡飛彈武器平臺與其對應的態勢信息的訓練集。其次,需要對模型中神經元的初始參數進行設置,并且選擇合適的訓練算法,以保證識別誤差達到理想狀態,并且訓練過程可以快速收斂。在任務規劃模型訓練后,訓練后的模型可以直接應用于任務規劃的武器裝備選擇。
4 結論
自組織態勢感知與決策系統的總體設計,將為系統的技術突破、功能實現、產品設計奠定基礎。通過對基于深度學習的態勢感知與決策系統的深入技術研究與產品研制,可望使系統在如下幾個方面得到發展與應用:一是向智能化、自主化發展,使系統變得“會理解、會思考、會決策”;二是向協同一體、精確作戰方向發展,有效縮短OODA 時間,提高作戰效能。基于深度學習的協同態勢感知與決策系統的發展,不僅可提高巡飛彈武器的態勢感知能力和精確打擊能力,而且可推廣到其他武器協同態勢感知與決策系統的研制,具有很大的軍事、技術和經濟效益。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16