一種新能源車電動出風口的控制方法
2021-06-11 14:56:57徐竹開環翾
今日自動化 2021年1期
徐竹開 環翾

[摘? ? 要]本文介紹一種新能源車電動出風口的控制方法,闡述控制器如何通過LIN總線控制出風口電機自學習,正常工作,以及故障處理,另外還介紹幾種電動出風口的控制模式。
[關鍵詞]新能源車;出風口;控制方式
[中圖分類號]F426.471;X51 [文獻標志碼]A [文章編號]2095–6487(2021)01–00–02
A Control Method for Electric Air Outlet of New Energy Vehicle
Xu Zhu-kai,Huan Xuan
[Abstract]This paper introduces a new energy vehicle electric outlet control method, mainly describes how the controller through LIN bus control outlet motor self-learning, normal work, and troubleshooting. In addition, several control modes of electric air outlet will be introduced.
[Keywords]new energy vehicle; air outlet; control mode
特斯拉汽車的橫空出世,改變了傳統汽車行業的格局,國內越來越多的企業投入到新能源造車行業。隨著新能源車行業競爭日益白熱化,各車企對汽車的智能化要求越來越高。本文所述的電動出風口能夠精細控制吹風方向,配合大屏控制可以多組實現自由風,鏡像風,自動掃風等智能吹風模式,與傳統汽車空調出風口相比更加智能。
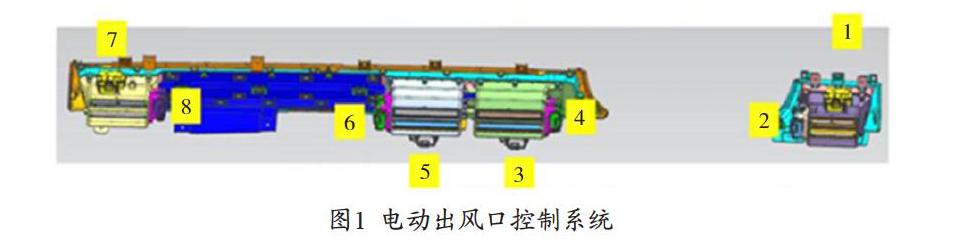
1 系統介紹
如圖1所示,本文所述電動出風口分為4組。每組由2個LIN步進電機控制,1個控制機械葉片上下轉動,1個控制機械葉片左右轉動。控制器接收來自大屏的控制信號,控制4組出風口的出風方向。1,3,5,7號電機控制水平方向,2,4,6,8號相機控制豎直方向。8個LIN電機由控制器通過LIN總線進行控制。其中1號電機控制節點地址0x01,應答節點地址0x21,2號電機控制地址0x02,應答地址0x22,依次類推。LIN總線上一共16個節點,控制周期為160 ms。
2 控制方法
2.1 自學習
電動出風口每個電機自學習流程是一樣的。主要原理是通過堵轉反饋計算出電機的有效行動范圍,并根據機械結構設置起始位及各個控制位置的步數。具體控制步驟如下:
(1)上電請求清除所有標志位(VGA_ClearFlagReq置14);請求電機停止轉動(VGA_StopModeReq置1);啟動自學習計時器T1。
(2)等待復位標志清除后(讀VGA_ResetSts為0)。停止請求標志位清除(VGA_ClearFlagReq置0);允許電機轉動(VGA_StopModeReq置0);設置當前起始位置為8000步(VGA_StartPstReq置8000);請求當前位置有效(VGA_PstValidReq置1)。
(3)等待電機停止模式恢復(讀VGA_StopModeSts為0)。請求電機線圈通電(VGA_CoilEnergReq置1);設置目標位置為0(VGA_TargetPstReq置0);設置目標位置有效(VGA_PstValidReq置0);此時電機會持續往逆時針方向轉動。
(4)等待電機堵轉(讀VGA_BlockSts為1)。清除所有標志位(VGA_ClearFlagReq置14);請求電機停止轉動(VGA_StopModeReq置1)。
(5)等待電機處于停止狀態(讀VGA_StopModeSts為1),等待電機堵解除(讀VGA_BlockSts為0)。停止請求標志位清除(VGA_ClearFlagReq置0)。當前位置即為起始位,設起始步數為1000(VGA_StartPstReq置1000);請求當前位置有效(VGA_PstValidReq置1)。
(6)等待起始步數設置成功讀(VGA_PstValidSts為1)。設置目標位置為65534(VGA_TargetPstReq置65534);設置目標位置有效(VGA_PstValidReq置0);允許電機轉動(VGA_StopModeReq置0);此時電機會持續往逆時針方向轉動。
(7)等待電機堵轉(讀VGA_BlockSts為1)。清除所有標志位(VGA_ClearFlagReq置14);請求電機停止轉動(VGA_StopModeReq置1)。
(8)等待電機處于停止狀態(讀VGA_StopModeSts為1),等待電機堵解除(讀VGA_BlockSts為0)。請求清除所有標志位(VGA_ClearFlagReq置14)。讀取當前位置N(N等于VGA_PstSt值),電機整個行程步數為N-1000。
(9)允許電機轉動(VGA_StopModeReq置0);停止請求標志位清除(VGA_ClearFlagReq置0);設置目標位置有效(VGA_PstValidReq置0)。
經上述步驟后,電機自學習完成,得到電機的有效行動步數(N-1000)。實際學習過程中還會監測學習是否超時(T1溢出),學習得到步數是否有效等判斷。超時或者學習步數無效則重新學習。為了保護電機和機械結構,1個上電周期內重新學習3次則停止再次學習。
2.2 工作
2.2.1 電源模式處理
控制器第一次上電或上次為異常斷電時,電動出風口進入自學習模式。8個電機同時開始自學習,等待8個電機都學習成功后根據機械結構分配各個擋位步數,進入正常工作。若電機3分鐘內未完成自學習,則認為故障,停止線圈供電并存儲故障代碼,其他正常電機進入正常工作。
控制器判斷到熄火,等待電機走到指定位置后E方存儲當前步數,并置電動出風口電機有效存儲標志。
點火喚醒后,判斷所有電動出風口電機有效存儲標志是否為1,如果都為1則電動出風口進入正常工作流程,否則電動出風口進入自學習模式。
2.2.2 工作模式
每組出風口電機都包含水平與豎直兩個方向控制,根據機械結構各自可以分成數擋,組成一個矩陣。本文中1,2,3,4號電機控制主駕駛員側風,5,6,7,8控制副駕駛員側風。每個方向都分為5檔。
如圖2所示,1號電機在位置3,2號電機在位置2,3號電機在位置2,4號電機位置3,5號電機在位置3,6號電機在位置2,7號電機在位置5,8號電機在位置5。
(1)自由模式
自由模式時,每組電動出風口電機獨立控制,不受其他組影響。例如當控制器接收到大屏的位置信號主駕左(2,3),主駕右(1,3)副駕左(3,3),副駕右(2,5),則1號電機走到2位置,2號電機走到3位置,3號電機走到1位置,4號電機走到3位置,5號電機走到3位置,6號電機走到3位置,7號電機走到2位置,8號電機走到5位置。
(2)掃風模式
電動出風口可以工作在水平掃風和豎直掃風2個模式。水平掃風時,水平方向坐標自動控制,豎直方向走到默認中間位置。收到水平掃風控制命令后1,3,5,7號電機不管處于什么位置,立刻向右側轉動,到達最右邊位置后等待其他電機,當所有電機達到最右邊位置后再全部切換到向左轉動,所有電機都達最左邊位置再全部切換成向右轉動,依此循環。因實際控制中各水平方向電機行程與收到LIN命令時間不一樣,所有必須判斷電機全部到位再切換方向。豎直方向掃風跟水平方向掃風控制類似。
3 故障處理
電機在運行中隨時監測電機反饋狀態,當出現以下幾種情況時處理如下:
(1)檢測到過溫標記時(VGA_BlockSts為0x1)時,需要馬上停止電機運動并清除故障標志位,重新進入自學習。
(2)檢測到過溫標記時(VGA_TempSts為0x2),控制器需要請求執行器進入停止模式(VGA_StopModeReq=0x1),且執行器線圈斷電(VGA_CoilEnergReq=0x0)。等待退出過溫(VGA_TempSts為0x0)后,執行線圈通電(VGA_CoilEnergReq=0x1),進入自學習。
(3)檢測電機發生電器故障時(VGA_FaultSts為0x1),控制器需要電機進入停止模式VGA_StopModeReq=0x1,且執行器線圈斷電VGA_CoilEnergReq=0x0。當電氣故障消除時,控制器必須發送控制幀重新使線圈通電VGA_CoilEnergReq=0x1,進入自學習。
(4)檢測到過壓(VGA_VoltSts為0x1)或欠壓標記(VGA_VoltSts為0x2)時,控制器需要請求執行器進入停止模式(VGA_StopModeReq=0x1)。當故障消除時,進行自主學習后運行到請求位置。
4 結論
本文提出來的一種新能源車電動出風口的控制方法對電動出風口控制進行了詳細闡述。實際控制中還會與模式電機,鼓風機等有邏輯關聯,由于篇幅限制,不詳細說明。該方法已經在量產車上經過了驗證,目前運行情況較好。
參考文獻
[1] 朱永存,趙玉霞.淺析純電動汽車熱泵空調系統[J].汽車與駕駛維修(維修版),2018(5):93-94.
[2] 徐磊,林用滿,宋文吉,等.電動汽車用熱泵空調系統的設計與研究[J].汽車技術,2013(11):55-58.
[3] 何賢,胡靜,錢程,等.純電動汽車兩種熱泵空調系統的實驗研究[J].制冷學報,2018,39(3):79-84.
[4] 張歡歡.電動汽車熱泵空調系統技術研究[J].安徽電子信息職業技術學院學報,2017,16(5):22-26.
[5] 葉立,李慧麗,陳宇,等.新能源電動汽車熱泵空調系統實驗研究[J].新型工業化,2019,9(2):112-117,127.