一種紅外探測器頻域參考像元校正的設計方法
2021-06-13 17:30:48尤鑫川王華薄姝夏丹妮
航天返回與遙感 2021年2期
關鍵詞:方法
尤鑫川 王華 薄姝 夏丹妮
(北京空間機電研究所,北京 100094)
0 引言
紅外探測器參考像元校正是在采樣前從有效像元中扣除參考像元輸出,從而降低探測器的讀出噪聲。國際上對于紅外探測器的參考像元在過去很長一段時間并無深入研究,較早發射的哈勃空間望遠鏡(HST)寬視場相機WFC3采用的參考像元校正方法為用有效像元的輸出值減去所在象限所有參考像元的中值[1],這與可見光探測器的校正方法相同。雖然紅外探測器與可見光探測器具有相似的電學結構,但是由于紅外探測器中參考像元和可見光CCD[2]以及CMOS[3]探測器常用的暗像元(遮光像元)不同,是通過不連接光敏管的方式實現不感光,其中不包含可見光探測器參考像元校正中必不可少的暗電流噪聲,因此不應直接套用可見光校正方法。國內目前對于紅外探測器的參考像元研究較少,直接套用可見光探測器的參考像元校正方法也因效果不明顯而被舍棄,大部分紅外探測器通常不進行校正[4-8]直接輸出有效像元數據,這使得讀出噪聲較大,影響系統信噪比。
近年來,國際上提出了兩種較為復雜的紅外探測器參考像元校正方法。一種為歐洲航天局(ESA)研制的歐幾里得空間望遠鏡(EUCLID)近紅外光譜光度計(NISP)使用的均值校正法。該方法針對單個有效像元,使用其對應的參考像元組(64×4)的均值進行校正[9],突出特點是不同的有效像元使用不同的參考像元組。另一種為詹姆斯韋伯空間望遠鏡(JWST)近紅外光譜儀(NIRSpec)所使用的讀出及校正(Improved Reference Sampling & Subtraction,IRS2)方法[10-12]。IRS2法是目前國內外唯一一種從頻域進行設計的參考像元校正算法,通過對比分析有效像元和參考像元的頻譜,設計并使用合理的系數譜對有效像元進行校正。上述兩種算法在其給定的測試環境中均取得較好的降噪效果。
但是EUCLID使用的均值校正法只對白噪聲有較好的降噪效果,對于相關噪聲部分效果極差甚至反而會增大噪聲值。而IRS2的設計過程中只考慮相關噪聲忽略了白噪聲,在白噪聲不可忽略時該校正方法的降噪效果極差;此外為了滿足算法需要,IRS2算法必須使用其規定的獨特的讀出順序,而目前國內紅外探測器無論是噪聲性能還是讀出過程均無法滿足該算法的要求。基于此,本文提出一種新的紅外探測器頻域參考像元校正的設計方法,該方法在均值校正和IRS2校正算法的基礎上,在系數譜設計過程中對白噪聲進行濾波處理。在白噪聲可忽略時,本方法可以得到與IRS2方法基本一致的校正結果,根據探測器讀出過程通過譜線合并放寬讀出過程要求;在白噪聲為主相關噪聲可忽略時,本方法的校正結果與均值校正近似相同;在兩種噪聲均不可忽略時,可以得到比上述兩種方法更好的降噪效果。
1 校正原理
參考像元校正需要依據探測器的實際噪聲特性進行設計,否則無法達到預期的降噪效果。探測器的輸出信號里除了圖像信息外還混雜了多種白噪聲和相關噪聲。白噪聲指功率譜密度在整個頻率內是常數的噪聲,如電阻產生的熱噪聲、pn結產生的散粒噪聲、溫度噪聲等均為白噪聲[13-14]。而相關噪聲的功率譜密度不為常數,如光電耦合器件的產生-復合噪聲(g-r noise)、閃爍噪聲(1/f noise)、隨機電報信號噪聲(RTS)等均為相關噪聲。法國里昂大學研究團隊針對Teledyne 公司H2RG紅外探測器進行了一系列測量,使用直接證據證明該探測器電學結構會產生1/f噪聲,且在系統噪聲中占有重要成分[15-16]。g-r噪聲、1/f噪聲具有長程相關性[17-18],即噪聲序列不同時間的觀測值具有顯著相關性。參考像元和有效像元的輸出中部分噪聲為同源噪聲,同源噪聲在有效像元和參考像元輸出中的噪聲分量為同一噪聲序列。頻域校正就是利用同源噪聲的相關性實現降噪效果,相關性越顯著,降噪效果越好;相反,均值校正針對同源噪聲的白噪聲,利用統計學特性進行降噪。而對于非同源噪聲部分則無法通過參考像元校正降低。
對于不同種類噪聲,本文將從單點校正、均值校正和頻域校正三種角度進行分析。單點校正可視為均值校正的極端情況,即使用一個參考像元的輸出數據進行校正,該參考像元一般選擇同時刻采樣或相鄰時刻采樣的參考像元。均值校正即扣除多個參考像元的均值或加權值,通過統計方法減小噪聲方差。頻域校正即先將有效像元和參考像元信號轉換至頻域,在頻域內完成扣除后再反變換回時域得到校正結果。
1.1 白噪聲
白噪聲指功率譜密度為常數的隨機信號,根據其幅值分布可以進一步細分為泊松白噪聲、高斯白噪聲等。白噪聲在任意時刻的幅值是隨機的,與其前后幅值均無關。參考像元和有效像元中不可能在同一時刻由同一白噪聲源引入同種白噪聲,無論是同一白噪聲源不同時刻引入的白噪聲,還是不同噪聲源引入的白噪聲,都不具有任何相關性。
因此,采用單點校正會導致輸出結果不僅包含有效像元的白噪聲,還包括新引入的參考像元的所有白噪聲,造成總白噪聲的增加。
采用均值校正則可以通過統計均值的方法降低白噪聲。以高斯白噪聲為例,n個噪聲信號相互獨立,都服從高斯分布(μ,δ2)。由于相互獨立,n個噪聲信號的加權累加和仍服從高斯分布由于加權系數和為1,因此多個噪聲信號的加權累加和的方差會變小,即總的白噪聲降低。
圖1 為參考像元和有效像元均包含多種不相關的泊松白噪聲和高斯白噪聲時不校正、單點校正和均值校正的MATLAB仿真結果,橫坐標參考像元的個數對范圍為1至50,對應使用1至99個參考像元,縱坐標為輸出噪聲總的電壓均方根(RMS)值即(系統噪聲)。其中,對稱均值校正指其使用的參考像元組的采樣時刻關于該有效像元對稱,即使用與該有效像元同時刻采樣的參考像元以及前、后時刻采樣的若干個參考像元;非對稱均值校正使用與有效像元相同時刻采樣的參考像元及已經完成采樣的若干參考像元,所有參考像元的采樣時刻均在有效像元采樣之前;單點校正和不校正分別固定使用1和0個參考像元,與橫坐標無關,圖中僅做對比。使用對稱參考像元組時,在頻域中其采樣沖激函數的虛部會恰好相互抵消,整個采樣沖激對的相位為0。因此,對稱均值校正的顯著特點是計算均值的過程中不會出現相移,均值的相位與有效像元同時刻采樣的參考像元的相位保持一致。而非對稱均值校正根據選擇參考像元組的不同,會產生不同程度的相移。

圖1 白噪聲電壓仿真結果Fig.1 Simulation results of white noise voltage
從圖1中可以看出:1)使用單點校正反而會增大白噪聲,圖中校正后系統噪聲高于不校正時的噪聲。2)使用對稱參考元和非對稱參考元進行均值校正時,相比單點校正和不校正的系統噪聲更低;使用均值校正可以有效降低系統噪聲,并且圖中隨著使用的參考像元數目的增多,系統噪聲不斷降低,降噪效果越好。3)當參考像元數目增加至21個,對應圖中橫坐標為11時,均值中的白噪聲大小已經遠遠低于有效像元自身的白噪聲大小,再增加參考像元數目不會對總的噪聲產生明顯影響。4)對稱參考元和非對稱參考元的頻域特性截然不同,但降噪效果完全相同。采用時域加權的效果與加權系數的頻譜、參考像元和有效像元的時間差均無關,僅與使用的參考元數目及時域加權系數有關。不可能通過IRS2即頻域校正的方式降低白噪聲。
因此,對于白噪聲占主要成分的系統可以使用均值校正的方式降低白噪聲,相比最簡單的單點校正,僅僅額外使用幾個參考像元進行校正就可以很大程度上降低白噪聲。
1.2 相關噪聲
探測器中可能出現的相關噪聲種類過多,不過在許多性能較好的紅外探測器中,1/f噪聲是探測器讀出噪聲的主要組成部分。因此這里以1/f噪聲為例介紹相關噪聲的降噪原理。
自相關函數不為沖激函數的噪聲信號稱為相關噪聲,維納-辛欽定理指出信號的功率譜密度是其自相關函數的傅里葉變換,因此相關噪聲的顯著特點是其功率譜密度不為均勻分布的常數。參考像元頻域加權校正的頻域、時域形式分別為:

式中Gd'ata為校正后的輸出;Gdata為有效像元輸出;refoutG為參考像元輸出;K為頻域加權系數;f為系統頻率;gd'ata、gdata、grefout、K、t分別為對應變量Gd'ata、Gdata、refoutG、K、f經離散傅里葉反變換后的時域值。將t=0代入式(2)可得

式中gdata(0)為某個有效像元數據;grefout(n)為與該有效像元間隔為n的參考元數據;k(-n)為對應的時域加權系數;gd'ata(0)則為該有效像元校正后的輸出數據。通常在系數譜設計完成后將其反變換至時域即利用式(3)進行工程實現。針對每個有效像元依次進行式(3)的計算后校正完成。
理想情況下,噪聲能量譜的幅值代表所含噪聲在各個頻率譜段上的能量,相位代表噪聲各個頻率上的初始相位。然而,由于噪聲成分過于復雜,總采樣時間不可能恰好是噪聲周期的整數倍,因此通過快速離散傅里葉變換(FFT)得到的相位譜本身就有很大的誤差。更關鍵的是,實際噪聲信號幾乎都為功率信號,周期內能量不收斂,不滿足狄利克雷絕對可積條件,其能量譜很可能不存在。工程中得到的是截斷的功率信號,截斷的功率信號能量有限,可以進行離散傅里葉變換,但變換后的頻譜并不是信號的真實能量譜,而是截斷信號的卷積譜。由于截斷的信號包含隨機過程,其卷積譜仍含有復雜的隨機過程,具體表現為不同截斷信號變換后的頻譜不穩定且難以反映真實的頻域信息。為此,文中采用經典譜估計中的周期圖法來得到信號的功率譜近似估計[19-21]。圖2為未使用周期圖法和使用周期圖法疊加不同次數的頻譜對比結果,當疊加次數足夠多時就可以近似得到理想的功率譜。


圖2 截斷后1/f噪聲信號FFT后的卷積譜Fig.2 Limited 1/f noise signal with the FFT periodogram method
周期圖法有兩個弊端[19-21]:1)分段后采樣點數變少,頻率分辨率變差;2)譜估計得到的是信號的功率譜,相位信息會全部丟失。在本文應用中這兩個弊端都可以忽略,原因是:1)快速離散傅里葉反變換后時域卷積系數與頻率加權系數的點數相同,因此實際操作中也會對頻譜中相鄰譜線進行合并以控制時域卷積窗的大小,頻率分辨率變差不會產生很大影響;2)參考像元和有效像元的相關信號相位一般都保持一致。圖3所示為不使用周期圖法時1/f噪聲混雜較多高斯白噪聲時有效像元和參考像元的相位譜及相位差,其中圖3(a)和(b)顯示有效像元和參考像元各自的相位譜十分混亂,但在圖3(c)中1/f噪聲集中的低頻譜段內(低于1000Hz的區間)兩者相位差近似穩定為0。由此可知,在相關噪聲所在的譜段中,盡管各自的卷積譜相位不確定,但兩者之間的相位差仍近似為固定值,因此可以通過這種方式得到相位差信息。
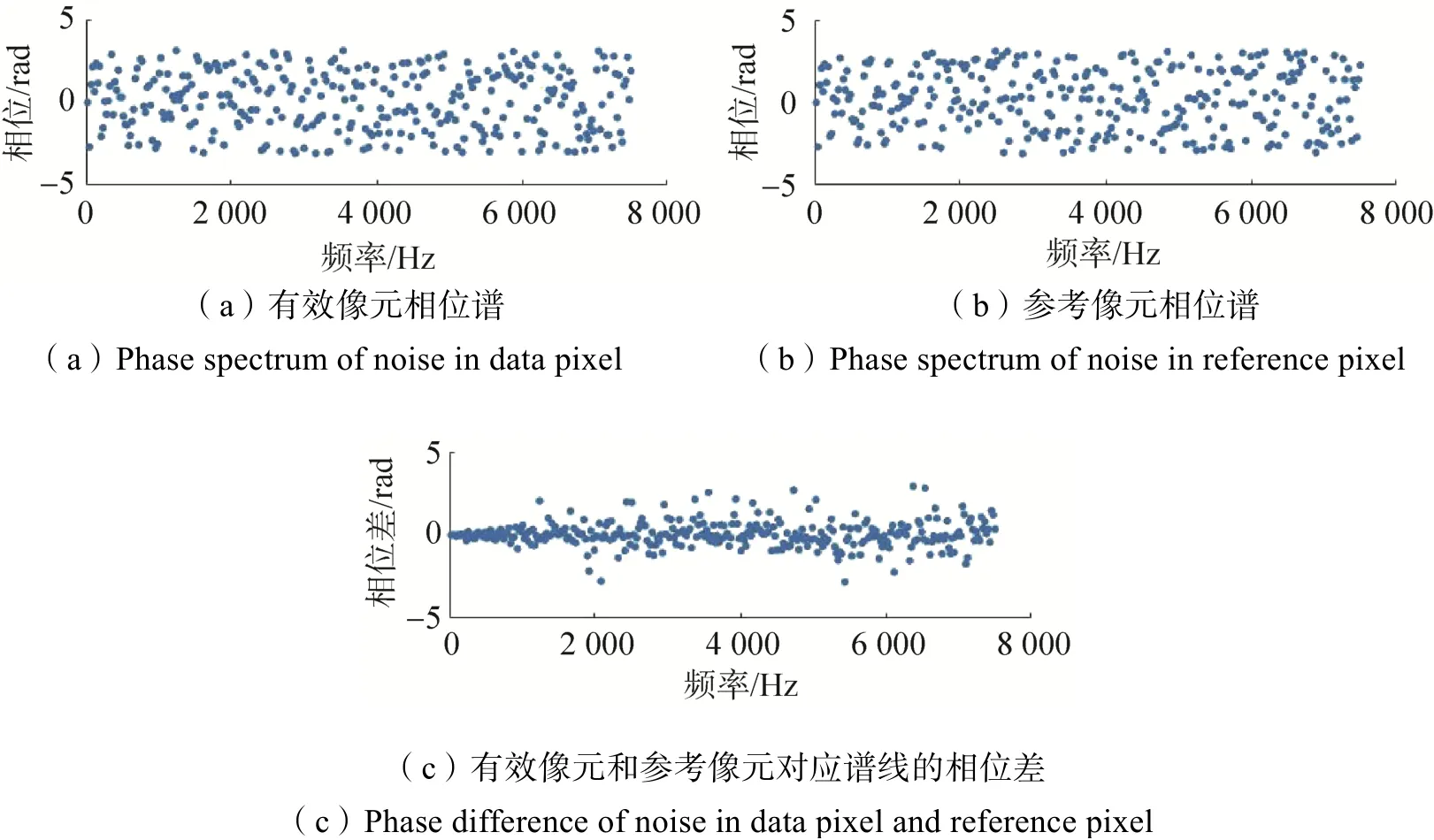
圖3 不使用周期圖法時有效像元和參考像元輸出的相位譜及相位差Fig.3 The noise in reference pixel and data pixel in Fourier domain and their phase difference
采用不同校正方式的1/f噪聲均方根仿真結果如圖4所示。當系統只含1/f噪聲時,由于其具有很強的相關性,單點校正直接扣除同時刻或相鄰時刻采樣的參考像元即可極大地降低1/f噪聲,圖4中單點校正為完全消除相關噪聲的極端理想情況。相反,采用均值校正反而會增大1/f噪聲,且加權的點越多、
降噪效果越差,這與白噪聲的情況剛好相反。除此以外,相關噪聲的降噪效果與校正所用的頻域系數譜有關,均值校正中所用參考像元組是否對稱會顯著影響降噪效果,這也與白噪聲的情況完全不同。由于此項仿真中有效像元和參考像元中添加的為同一1/f噪聲,且其相位差為0,所以校正所用系數譜的相位越接近0降噪效果越好。因此,系數譜相位在整個頻域內恒定為0的對稱均值采樣的降噪效果優于非對稱均值采樣。
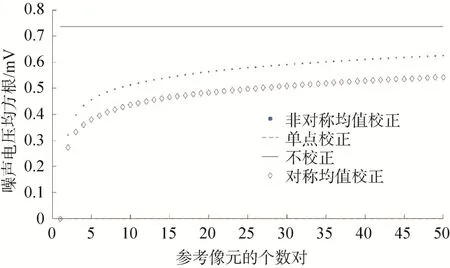
圖4 采用不同校正方式的1/f噪聲電壓仿真結果Fig.4 Simulation results of 1/f noise voltage RMS
2 設計方法
根據前文白噪聲和相關噪聲的校正原理可以看出,EUCLID中使用的均值校正可以有效抑制系統白噪聲分量,但會放大相關噪聲分量;相反,IRS2使用的頻域校正可以有效抑制相關噪聲分量,但會放大白噪聲分量。工程實際中很可能系統白噪聲與相關噪聲均不可忽略,這時無論采用哪種方法都無法得到較好的校正效果。綜合兩種噪聲的降噪原理,本文給出在白噪聲與相關噪聲均不可忽略時頻域參考像元校正的設計方法,具體步驟為:
1)測量噪聲的頻域特性,包括幅值和相位兩部分。將有效像元和參考像元的輸出序列分別進行快速離散傅里葉變換得到兩者的卷積譜,再通過周期圖法或其他譜估計方法得到功率譜,功率譜中包含噪聲的幅值特性。如果功率譜近似為常數,則系統噪聲以白噪聲為主;若不為常數但高頻部分近似為0,則以1/f噪聲等相關噪聲為主;若高頻部分近似為非零常數則兩種噪聲均不可忽略。將兩者卷積譜相除,比值的相位譜即代表兩者噪聲的相位差。
2)將第一步中由譜估計得到的功率譜以及卷積譜比值的相位譜進行譜線合并。通過插值使得每根譜線的寬度與探測器的采樣頻率保持一致。如果譜線寬度與采樣頻率不同,則無法得到算法所需的所有數據,導致算法無法實現。相比IRS2方法,新加入的譜線合并操作可以適當放寬對探測器讀出頻率、順序的要求,但相應也會影響降噪效果。
3)設計頻域系數譜的幅值和相位。IRS2方法中直接將兩者卷積譜的比值作為系數譜,這種處理存在兩個問題:①卷積譜中兩者幅值比值不為穩定值,使用不同的數據序列會得到不同的比值。不過其使用近百萬個參考像元數據進行計算,超長數據序列確實會有穩定的卷積譜,但如此龐大的計算量對于星上存儲空間、計算速度都提出了極高的要求。②其探測器噪聲性能優越、無需濾除白噪聲,這也直接導致了在其他探測器中使用該算法反而會放大白噪聲分量的致命問題。基于這兩點,本文算法在設計頻域系數譜時額外加入了濾波處理:①記錄功率譜中幅值幾乎不變的譜段(即只包含白噪聲的譜段),計算這些譜段的幅值均值。將功率譜中白噪聲譜段的幅值固定為0,其余譜段的幅值減去白噪聲譜段幅值均值。使用處理后功率譜的比值作為頻域系數譜的幅值。②白噪聲譜段范圍內系數譜的相位固定為0,其余譜段的相位仍與卷積譜相位差一致。
4)將頻域系數譜開根號后進行快速離散傅里葉反變換,保留實部即可得到對應的時域系數。在時域中計算只需要存儲預設的時域系數,無需同時存儲所有參考像元數據,可以極大地降低星上數據處理的壓力。
3 仿真分析
由于g-r噪聲、偏置電壓波動引起的噪聲、奇偶列固定模式噪聲很難完整仿真,仍用多種1/f噪聲、高斯白噪聲和泊松白噪聲的混合噪聲作為仿真條件。給出不同噪聲條件下不校正、單點校正、均值校正、本文設計的方法頻域校正及未經過濾波處理的IRS2方法校正的仿真結果。其中單點校正是指能完全消除相關噪聲的極端理想情況,均值校正細分為使用所有參考像元參與計算和只使用5個參考像元參與計算兩種類型。
在以1/f噪聲為主時不同校正方法的仿真結果如表1所示,可以看出:1)在以相關噪聲為主時,頻域校正方法會優于均值校正,但兩種均值校正方法都會導致系統噪聲增大,且使用參考元越多、降噪效果越差。2)兩種頻域校正方法對于相關噪聲的降噪效果很好,相比不校正系統噪聲均大幅降低。3)由于1/f噪聲在高頻區和白噪聲無異,本文頻域校正方法在設計頻域加權系數的過程中,會不可避免地錯誤濾掉了部分1/f噪聲成分,甚至白噪聲幅值扣除過多,這種情況錯誤地判斷白噪聲譜段范圍會影響降噪效果。因此在以相關噪聲為主時,跳過白噪聲濾波步驟會更好。

表1 1/f噪聲為主時不同校正方法的仿真結果對比Tab.1 The simulation results of different correction methods with 1/f noise dominant 單位:mV
在只以白噪聲為主和兩種噪聲均不可忽略時,不同校正方法的仿真結果分別如表2和表3所示。由表2可以看出,在只包含白噪聲時,兩種均值校正的仿真結果噪聲最小,IRS2方法的噪聲最大,本文改進的頻域校正方法處理得到的系統噪聲與均值校正相近,解決了IRS2方法無法處理白噪聲的問題。分析表3可以發現,在兩種噪聲均不可忽略的情況下,無論是采用均值校正還是IRS2方法噪聲大小都接近甚至高于不校正,而使用本文提出的頻域校正方法時系統噪聲在不同條件下均低于其他方法,此方法可以更大程度地降低系統噪聲。

表2 白噪聲為主時不同校正方法的仿真結果對比Tab.2 The simulation results of different correction methods with white noise dominant 單位:mV

表3 1/f噪聲和白噪聲都不可忽略時不同校正方法的仿真結果對比Tab.3 The simulation results of different correction methods without noise dominant 單位:mV
4 結束語
本文通過MATLAB仿真對紅外探測器中使用參考像元校正降低白噪聲、相關噪聲的作用原理進行了探究,針對目前國際上較為先進的均值校正法和IRS2頻域校正法的工作原理進行了研究分析,結果顯示:均值校正法可以有效降低系統白噪聲分量,但同時會明顯放大系統中的相關噪聲分量;利用相關噪聲的自相關性使用頻域校正方法,可以有效降低相關噪聲,但此方法也會顯著放大系統中的白噪聲分量;當系統中白噪聲成分和相關噪聲成分均不可忽略時,上述兩種方法均無法有效降低系統噪聲。
在IRS2頻域校正方法的基礎上,本文提出了一種新的紅外探測器參考像元校正方法。該方法使用周期圖法等譜估計的方式得到系統噪聲功率譜更為準確;利用插值法進行譜線合并大幅降低了原方法對探測器讀出順序、星上數據處理能力的要求,使其能夠適配更多探測器;本文方法選擇在設計頻域系數前先進行濾波處理,去除功率譜中白噪聲成分后再進行頻域校正,有效解決了原方法會放大白噪聲成分的致命問題。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56