針對光柵圖像的快速盲去噪方法
2021-06-15 09:10:06張申華楊延西秦嶠孟
中國光學 2021年3期
張申華,楊延西,秦嶠孟
(1. 西安理工大學 自動化學院,陜西 西安 710048;2. 安康學院 電子與信息工程學院,陜西 安康 725000;3. 陜西省復雜系統控制與智能信息處理重點實驗室,陜西 西安 710048)
1 引 言
由于具有非接觸、高精度和快速的優點,基于正弦光柵條紋投影的相位輪廓術目前被廣泛研究。正弦光柵被數字光處理(Digital Light Procession, DLP)投影儀投影至被測物體的輪廓上,經物體外形調制后發生形變,并被工業相機采集[1-8]。計算出捕獲條紋的相位,借助標定出的參數,最終可以計算出物體的三維外形輪廓尺寸。然而在測量過程中,受到環境及工業相機自身的影響,采集到的光柵圖像存在噪聲。噪聲的存在降低了圖像的質量,影響后續相位的高精度提取,并最終導致三維測量準確度降低。因此,有必要對噪聲進行處理。在實際應用中,由于采集到的光柵圖像噪聲未知,從而給噪聲處理帶來了困難。
雖然在數字圖像處理領域很多研究人員對去噪問題進行了大量研究[5-7],對于條紋圖像噪聲的處理,主要采用中值濾波的方法[8]和偏微分方程(Partial Differential Equation, PDE)方法[9-11]。中值濾波方法實現簡單,但是對噪聲的抑制效果有限。基于偏微分方程的濾波方法是利用偏微分方程進行數值運算,逐個像素修改灰度值,以達到濾除噪聲的目的。為了濾除噪聲,Wang提出了一種方向性的相干增強擴散濾波方法[9],該方法沿條紋水平方向及垂直方向濾波。文獻[10]提出了一種基于二階偏微分方程模型的方向性濾波方法,根據電子散斑干涉條紋的方向濾波。Zhou對文獻[10]中的模型進行了改進,提出了一種自適應的方向性偏微分方程模型[11]。總的來說,基于PDE擴散的濾波方法存在以下不足:(1)該類方法基于擴散的思想,逐點處理每個像素點,而相位輪廓術一般需要處理多幀光柵圖像,噪聲處理過程耗時;(2)數值計算中的迭代次數、時間步長等參數通常需要反復實驗才能確定。
基于噪聲水平估計的方法,是盲噪聲處理的重要研究方向[12-18]。該方法一般利用高斯分布模型對未知噪聲進行建模,并獲取噪聲的方差值。Donoho利用離散小波變換對信號進行三層分解,并取對角線系數的中值作為噪聲方差的估計值[12]。基于主成分分析(Principal Component Analysis,PCA)的方法[13-14]利用單幅圖像生成樣本塊庫,并通過樣本塊庫估算出噪聲方差。這種方法在高光譜圖像去噪[15]、視頻噪聲估計[16]、中子圖像去噪[17]及特征提取[19]等方面得到了應用。但是基于PCA的方法估計出來的噪聲水平常常偏低[20],導致利用估計值進行去噪的效果不夠理想。
在現有的研究中,對于圖像中的未知噪聲,一般是進行高斯建模[20-22],基于此,本文借鑒現有文獻的處理方法,對光柵圖像中的噪聲進行高斯建模,并引入PCA方法對噪聲水平進行估計,并依據估計結果完成噪聲處理。首先,針對PCA估計出的方差水平偏低的問題,利用殘差模型,提出一種真值圖像和噪聲圖像分離方法,從含噪光柵圖像中分離出噪聲圖像,然后對噪聲圖像進行PCA估計。其次,提出了一種基于相圖的噪聲濾除方法。該方法利用估計出的噪聲方差值,在展開的相位圖上進行高斯濾波,避免了對多幀光柵條紋分別進行濾波處理,降低了處理的數據量,提高了噪聲處理的時效性。
2 基于PCA的噪聲估計方法
在光柵投影測量系統中,DLP投影儀投影到被測物體上的光柵條紋被工業相機采集,用符號f表示。根據殘差模型,f中包含噪聲n和未被污染真值條紋圖像r,用公式表示為

式(1)中的噪聲n為 均值為零、方差為的高斯白噪聲。。根據Liu的分析[14],在某一向量U的方向上有
為了濾除條紋中的噪聲,需要首先估算出

其中Cf表示f的協方差矩陣,Cr表示r的協方差矩陣,λmin表示求取協方差矩陣的最小特征值。
在式(2)中,對于細節信息不豐富的圖像,在信息冗余特性的假設下,r的數據主要分布在有限主成分分量上。在此前提下,

由此,可以估算出噪聲的方差值

研究組成員利用PCA方法對仿真光柵條紋進行了噪聲方差估計,結果如圖1所示。由圖1(b)中的比值曲線可以看出,PCA方法估計出的方差普遍偏小(圖1中 σ表示噪聲方差的真值,表示估計值)。

圖1 PCA方法對仿真噪聲的估計Fig. 1 The estimation of simulation noise by PCA method
若選擇數據的協方差矩陣大小為9×9,其各主成分占比如圖2所示,由圖中占比可以看出,后7個主成分占比小且極為接近,若僅選擇占比最小的主成分對應的特征值作為噪聲方差,實際上人為降低了噪聲的成分,這是PCA方法估計結果偏小的原因。

圖2 主成分分量占比Fig. 2 Proportion of principal component
3 基于殘差模型的噪聲估計
針對PCA估計方法的不足,本文對噪聲估計方法進行改進。對式(1)中的f進行特征值分解,可以得到

式中,U表示特征值矩陣 Λ對應的特征向量。符號T表示轉置操作。Λ為對角矩陣,表示為

其中 λ1,···,λM表示特征值且以降序排列,其大小代表了各主成分的能量貢獻度,M表示f的秩。
令各主成分的能量貢獻率表示為

若令前P項特征值(P<M)對應的向量為RP,則真值光柵圖像可表示為

根據式(1),噪聲圖像可以用殘差模型表示為

根據文獻[12]的證明,n的協方差矩陣最大特征值收斂于,也就是最終的噪聲方差估計公式為:

為了實現式(9)中真值光柵圖像與噪聲圖像的分離,需要合理確定P值。假設工業相機的信噪比為ddB,也就是信號的功率Wo與噪聲功率Wn的比例關系為

根據式(11)所表示的比例關系,且所有主成分的能量貢獻值為,又知真值圖像的能量貢獻與噪聲圖像的能量貢獻比值與Wo/Wn相等。由此,噪聲部分的能量貢獻值可以表示為
若某一成分的特征值λi滿足

則可以將該主成分分量劃歸到真實光柵圖像r,否則,該主成分分量劃歸到噪聲圖像n。
根據式(13)將滿足條件的最大i值,設定為P值,即可實現式(9)中噪聲圖像與真值圖像的分離。
4 基于相位圖的高斯去噪
為了降低數據處理量,減少處理時間,本文提出了基于相位圖的高斯去噪方法。在相移法測量中,通常需要投影和采集多幅光柵圖像。以4步相移法為例,投影的4幅光柵條紋為

其中A表示平均分量,B表示調制度,?表示相位。
若工業相機采集到多幀光柵圖像后,再對每一幅圖像進行去噪,無疑會大大增加要處理的數據量和時間。為此,本文將光柵圖像上的噪聲處理轉換到相圖上進行。投影的光柵條紋的光柵頻率分別為
本文采用三頻外差法[23]展開包裹相位,需要, 其包裹相位分別用 ψ1,ψ2,ψ3表示。通常,取s=64, 首先由ψ1和 ψ2做外差,得到頻率為的 包裹相位 ψ12,再由 ψ2和 ψ3做外差,得到頻率為的包裹相位 ψ23,然后由 ψ12和 ψ23做外差,得到頻率為1的相位ψ123,最后,利用式(15)和式(16),通過中間展開相位 φ■s+1即 可得到ψ1的最終展開相位?。

在式(15)和式(16)中,相位ψ1,ψ12,ψ123取值在(?π,π)之 間,而和 ?的取值范圍一般遠大于該取值,因此,可以對式(15)和式(16)做如下近似:

在僅考慮零均值的高斯噪聲影響下,時域上光柵條紋的噪聲方差 σn和 展開相位圖 ?的方差σ1及 相移步長N、調制度B之間關系為[24]

根據方差的性質,依據式(17)和式(18)所表示的比例關系,相位和 ψ123的方差分別為

5 實驗測試
圖3為本文搭建的光柵投影測量平臺結構圖,其主要由投影儀、工業相機及便攜式計算機組成,主要參數如表1所示。實驗首先投影12幀
正弦光柵條紋圖像,并由同步信號觸發控制工業相機完成光柵圖像的采集。利用采集的光柵條紋圖像,對本文所提方法和對比方法進行了測試。

圖3 測量系統結構圖Fig. 3 Framework of measuring system

表1 儀器設備型號和參數Tab. 1 The instrument types and parameters
在測量平臺上采集到的12幀光柵圖像中選取一幀,如圖4(彩圖見期刊電子版)所示。利用本文提出的方法和對比方法進行噪聲方差估計后,分別進行噪聲處理。各種對比方法的噪聲估計值如表2所示。

圖4 采集的光柵圖像Fig. 4 Captured grating image

表2 各種方法的噪聲方差估計值Tab. 2 The estimated noise variances of different methods
為了驗證本文方法的估計效果,利用表2的估計值對圖4的光柵圖像進行噪聲濾除,效果如圖5(彩圖見期刊電子版)所示。對12幀光柵圖像采用文獻[10]的方法分別進行方向性PDE濾波后,提取出的相位圖如圖5(a)所示。實驗中時間步長設置為 ?t=0.1s, 迭代次數N=75(實驗參數非最優設置)。對光柵圖像采用中值濾波后,利用相移法得到的相位圖如圖5(b)所示,實驗中濾波模板大小設置為3×3。首先采用文獻[12]提出的方法估計出噪聲方差,然后,利用估計值對光柵圖像進行高斯濾波處理,處理后的相位圖如圖5(c)所示,實驗中先采用db2小波對光柵圖像進行三層分解,然后求取第三層分量的對角系數,計算出其中間值與0.674 5的比值,最后將計算出的比值作為噪聲方差的估計值。采用文獻[13]中提出的PCA方法對單幀光柵圖像估計出噪聲方差后,再利用估計值對采集到的每幀光柵圖像進行高斯濾波,結果如圖5(d)所示。利用本文方法先估計出單張條紋圖像的方差值,再進行相圖濾波后提取的相位結果如圖5(e)所示。圖5(f)是投影相移步長為20的正弦條紋,然后利用相移法和三頻外差法獲得的相位圖。
對于圖4中紅色虛線標定的一行區域,以二十步相移法獲取的相位為基準,采用其他方法計算出的相位與基準相位取差值,相位差值曲線如圖6(彩圖見期刊電子版)所示。由相位差曲線可知,和其他對比方法相比,本文方法處理后的相位更加逼近真實相位。本文將二十步相移法獲取的相位作為測量體的真值相位并將其作為基準相位。這樣設置的依據如下:根據式(19),增大相移步數N能夠有效降低相位差的方差值,并且在現有的文獻研究中,一般采用二十步相移法[25-26]或四十八步相移法[27]作為測量體的真值,因此,本文采用同樣的處理方法獲取測量真值。
為了定量評估本文所提方法的性能,定義最大相位誤差(Maximum Phase Error, MPE)和均方根誤差(Root Mean Square Error, RMSE)作為評價指標,其中 MPE表征相位值偏離真值的最大幅度, RMSE表示相位和真值相位的逼近程度,定義分別為:


式中 ?′表示采用各種方法處理后的相位,表示被測體的真值相位,L表示相位點個數。

圖5 幾種不同方法的濾波效果Fig. 5 Filtering effect obtained by different methods
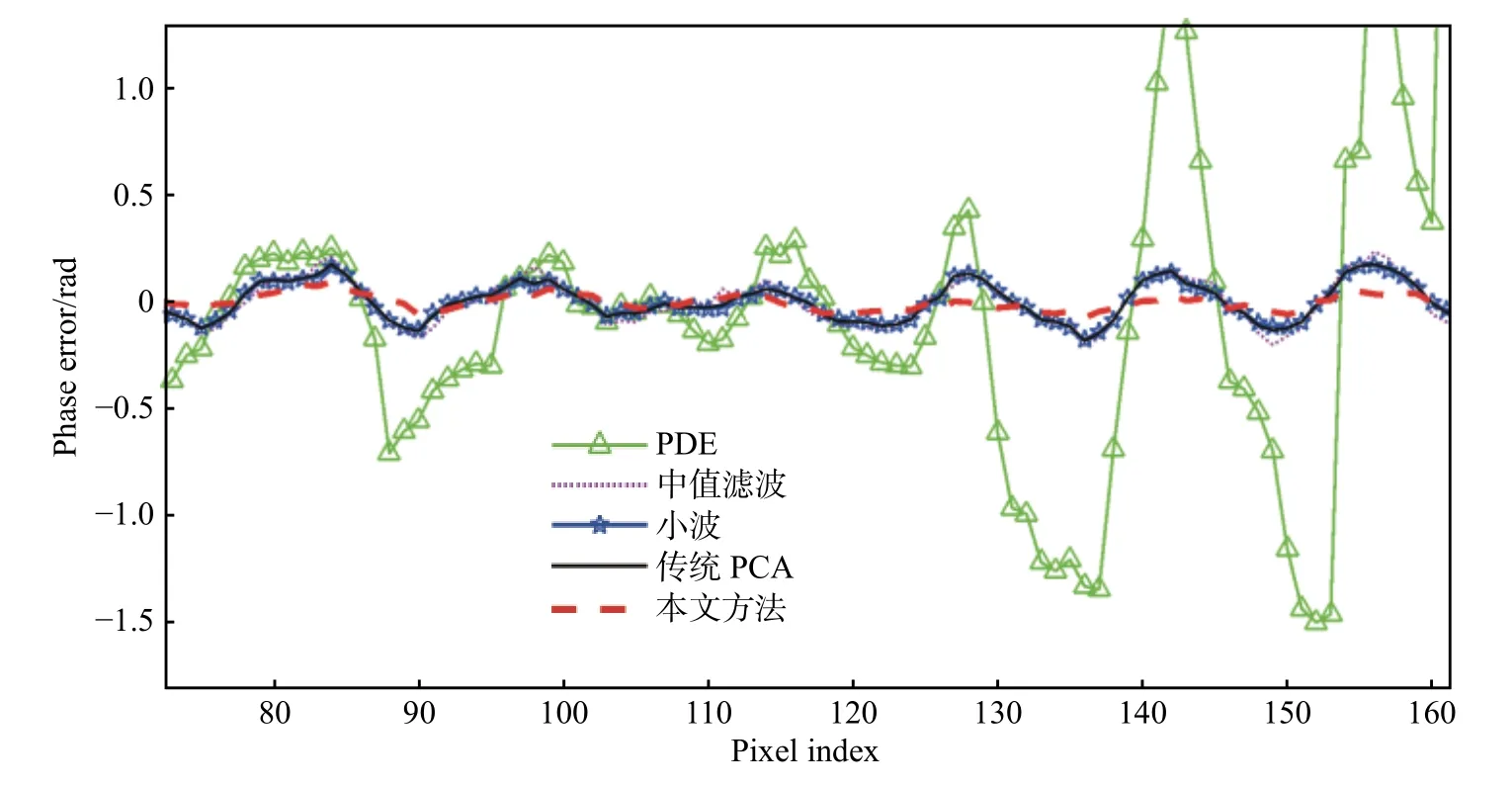
圖6 各種方法的相位差Fig. 6 Phase errors obtained by different methods
任意選取測量體的第150行相位,計算出各種方法的M PE、R MSE及執行時間,結果如表3和表4所示。由表3和表4的數據可以看出,在最短的運行時間內,本文方法的 RMSE值較中值濾波、PDE、小波和傳統PCA相比,分別下降了38.6%、88.5%、42.6%和43.1%。表明本文方法的相位更加接近測量體的真值相位,對噪聲抑制效果最好。需要說明的是,受采集角度和光源等因素影響,光柵圖像存在陰影區域,導致區域內的相位信息丟失。對陰影區域采用PDE擴散濾波后,錯誤的像素信息會經過擴散傳導至正常的光柵區域,導致測量結果發生錯誤。如表3所示,PDE方法的相位最大偏離幅度達9.234 3 rad,因此,當測量體輪廓不連續時,PDE方法噪聲處理效果不好,同時,耗時也最久。對于最大相位誤差值,中值濾波方法的 MPE 值為0.385 6 rad,小于本文方法的0.700 3 rad。這是由于測量過程中光柵圖像存在孤立噪聲點,而中值濾波在處理這類噪聲時的性能要優于本文方法,但是中值濾波的相位平均運算會導致在物體輪廓不連續區域產生明顯的錯誤相位(如圖5(b)中面具左眼區域)。

表3 幾種算法的量化指標對比Tab. 3 Comparison of quantitative indicators for different methods

表4 幾種算法的執行時間對比Tab. 4 Comparison of computing time for different methods (s)
由相移法提取相位,一般通過求反正切函數計算出包裹相位,且至少需要3幀光柵圖像才能計算出包裹相位。本文方法在估計噪聲方差時,為了提高時效性,任意選取其中的一幀光柵圖像估計方差值。這是由于在測量平臺上,光柵圖像在數秒內甚至更短的時間內完成投影和采集,噪聲方差這一統計值在較短的時間內能夠維持穩定。
6 結 論
光柵條紋投影測量過程中,由于采集到的光柵條紋圖像存在噪聲,且噪聲未知,從而導致提取的相位精度降低,甚至出現錯誤。針對這一情況,本文提出了一種快速盲去噪方法。首先,利用殘差模型和相機參數,提出了一種光柵圖像的噪聲和真值圖像分離方法,并引入PCA對噪聲圖像進行噪聲水平估計,克服了傳統PCA方法估計結果偏低的問題。為了減少噪聲處理的數據量,提出了基于相位圖的高斯去噪方法,利用式(19)~式(21)所描述的時域噪聲方差與相位圖方差間的關系,將在時域上的光柵圖像去噪轉換至在相位圖上進行。轉換后,需要處理的光柵圖像幀數減少到3幀,處理數據量大為減少,處理時間變短。測試實驗結果表明,和對比方法相比,本文方法可在最短的執行時間內,使光柵圖像相位的RMSE值最高下降88.5%,所提方法對噪聲的抑制最為明顯,處理后的相位圖更加接近真值相位。
需要指出的是,本文方法將隨機選取的一幀光柵條紋圖像的噪聲方差估計值作為所有采集圖片的噪聲方差值。這樣處理的前提條件是:在光柵條紋圖像投影測量過程中,采集到的每幀光柵圖像的噪聲方差值應基本保持穩定,這也是本文方法有效的條件。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
