單鏡頭無人機的實景三維建模研究
2021-06-17 09:04:24雷英棟沈旭東吳湘蓮
電子制作 2021年8期
關鍵詞:模型
雷英棟,沈旭東,吳湘蓮
(嘉興職業技術學院,浙江嘉興,314051)
1 背景
隨著科學技術的不斷發展,城市管理的信息化程度越來越高,構建數字三維城市,已經成為城市管理中的重要手段,城市三維模型的構建,對于城市的建設與規劃,管理和應急響應處置等,都發揮著重要作用。
傳統的地形測繪,是按照一定比例尺,逐點完成地形特征點數據采集,設備多、重量大、成本較高、工作強度也大、效率低、精度更是難以保證。伴隨著近幾年來無人機技術長足的發展,以及無人機傾斜攝影測量技術的出現,裝載多鏡頭傳感器進行傾斜攝影,利用軟件快速生成三維模型,變得更加高效和低成本。越來越多的從業者充分利用無人機傾斜攝影技術進行三維建模。
主流的方案是使用工業級無人機搭載傾斜攝影五鏡頭相機構建城市實景三維模型,雖然提高了作業效率,但是價格就會相當昂貴,并且笨重的多鏡頭相機,對無人機的工作穩定性和續航能力提出了更高的要求,所以運用無人機多鏡頭進行傾斜攝影測量,成本和技術門檻還是很高的。
隨著消費級無人機的快速發展,消費級無人機,如大疆,具有相對較低的價格,并且容易上手操作,申請空域也較為方便等優勢,逐漸成為尋常百姓獲取影像資料的平臺。利用單鏡頭無人機獲取航拍影像,在相對較小的城市實景三維建模項目中優勢明顯。
另外,計算機不斷提高的硬件性能,計算機視覺技術和運算能力的不斷進步,已經可以實現超多影像資料進行快速密集匹配的功能。此外,隨著ContextCapture,Pix4D,PhotoScan等三維重構軟件的不斷發展進步,己經可以利用消費級的單鏡頭無人機,甚至是手機采集的影像,進行自動化構建三維模型。這為單鏡頭無人機實現實景三維建模提供了后期處理的軟件支撐。
本文主要研究基于大疆御2Pro無人機,應用地面站軟件為Altizure進行航線規劃、照片采集,利用ContextCapture軟件,完成后期空三運算和三維模型構建。
2 無人機傾斜攝影測量技術
■2.1 傾斜攝影測量技術
傾斜攝影測量是一種對物體進行從多個方向觀測的航空攝影技術,從不同的方位去采集物體的側面和頂面紋理,采集清晰度高、精度高、范圍大的被測區域圖像信息,后期利用先進的定位、融合、三維建模技術重建實景三維模型,以此表達出被測區域物體的幾何屬性,保證達到測繪級精度。該技術在20世紀90年代開始在國外發展,而我國開始于2010年的4月份。
通過消費級單鏡頭無人機傾斜攝影測量技術構建實景三維建模,在理論上可以實現,這降低了傾斜攝影測量技術的經濟成本和技術門檻,在小范圍內實現實景三維模型的快速構建提供新的思路,具有一定的應用價值。
■2.2 基本思路
本項目基于無人機傾斜攝影技術,嘗試使用單鏡頭無人機作為信息采集平臺,采集實驗區的圖像數據,進行城市實景三維模型構建,實驗以某一區域為例,構建其實景三維模型,驗證單鏡頭無人機是否可以用于城市實景三維模型的構建。通過地面站軟件操縱無人機按照地面站軟件設計航線飛行,獲取傾斜多視角影像;圖像預處理后導入三維建模軟件,由軟件進行空中三角運算,完成三維建模,得到粗模。技術路線如圖1所示。

圖1 單鏡頭無人機實景三維建模技術路線
3 單鏡頭無人機實景三維建模
■3.1 單鏡頭無人機的選型
本文選用大疆的御2Pro無人機進行圖像信息采集,該無人機機身為折疊結構,便于攜帶,續航時間官方標注為31分鐘,結合大疆的飛控系統,飛行異常穩定、靈活,相比工業無人機價格合理。該無人機搭載1英寸CMOS單鏡頭相機,2000萬有效像素的,具備了獲取影像信息的條件。
此外,御2Pro搭載了GPS+GLONASS的衛星定位系統,圖像可以記錄POS數據,完全達到了高精度定位的要求。在安全性上,御2Pro無人機配備了全向感知系統(前后下雙目視覺系統,左右單目視覺系統,上下紅外傳感器),上下前后左右都有可感知障礙物距離的能力,可以有效保障無人機飛行安全。
■3.2 地面站軟件選擇
目前,國內外常用的無人機航線規劃控制軟件有:Litchi Vue, Altizure,DJI GS Pro, Rocky Capture等。
本項目采用的是Altizure,該軟件是集航線規劃、照片采集和三維瀏覽為一體的移動端平臺,可以用于控制 DJI (大疆創新)各系列無人機,幫助快速規劃航線,拍攝正射和傾斜照片。
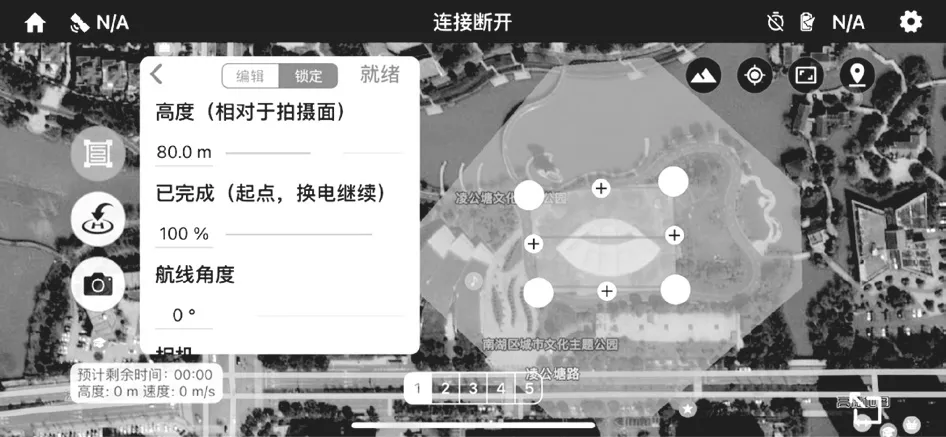
圖2 Altizure軟件航線規劃界面
■3.3 無人機傾斜攝影數據采集
實景三維建模要想獲得高清晰,高質量的傾斜攝影圖像信息,一般來說對于同一個特征點和地表物品,需要有三張以上小于15°角的不同角度的圖片覆蓋,覆蓋度越大、重疊度越高,后期處理就能得到精細程度越高,質量越好的實景三維模型,但會導致計算機的負荷加大,計算時間越長。所以考慮到效率和模型質量的平衡,并結合當地實際的環境情況,對無人機測繪路徑進行規劃,針對被測對象確定飛行高度,速度,影像采集密度,航向重疊度,旁向重疊度等。
(1)設置航高
針對不同的實景三維建模任務,飛行的高度也略有不同,主要是結合模型的用途和所要達到的分辨率,在依據航高的計算公式來以此確定航拍的高度。一般情況下,進行低空測繪,70-80m的航高足以滿足要求。
本次測量實驗區的區域面積不大,長度大約90米,寬度大于60米。建筑物高度在15m上下,周邊建筑物高度不超過40m,因此,本次航測將航高設定為80m。
(2)設置像片重疊度
圖像的重疊度包含兩項內容,分別是航向重疊度和旁向重疊度。根據航攝中對于圖像信息重疊度的要求,一般情況下要求航向重疊度應保持在60-80%,但是不能小于53%;旁向重疊度一般應保持在15%-60%,但是不能小于8%,越高越好,后期成圖率就越高。建議采集航向重疊不小于80%,旁向重疊不小于50%的影像。本項目將航向重疊度設為80%,旁向重疊度設為70%,保證獲取更多的圖像信息。
(3)設置航線參數
航線是根據測區的面積來確定的,可以確定飛行航向及航線長度,一般為“之字形”航線,飛行的速度不宜過大,攝影基線長度和航線間隔寬度都可根據相關公式計算得出,倘若使用地面站軟件,軟件將自動生成航線并確定航線間隔寬度。
消費級無人機御2Pro作為航攝的飛行平臺,相機的傾角設為45°,飛行的平均速度設為3m/s,整個航攝任務大約需要飛行40分鐘。實驗區飛行計劃的詳細信息如表1所示。

表1 飛行計劃詳細信息表
■3.4 實景三維建模
對于三維建模系統,目前國內外主流的幾種航測實景建模軟件主要包括:ContextCapture,PhotoScan,Pix4D Mapper等。
本文選用的是ContextCapture軟件,實現航測區域較高精度的還原。ContextCapture是Bentley旗下的一款三維實景建模軟件,使用ContextCapture,用戶可以快速為各種類型的基礎設施項目生成三維模型。其具體作業流程如圖3所示。
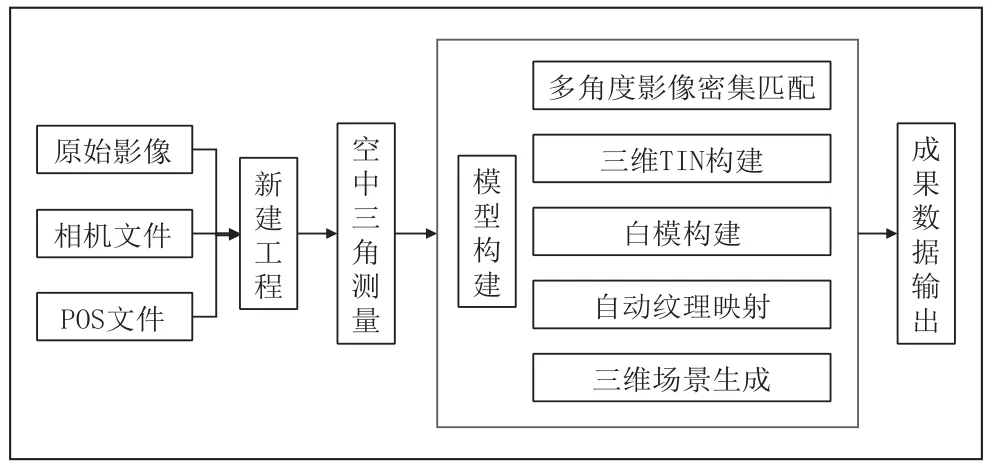
圖3 Context Captur軟件建模流程
本次共采集圖片116幅,導入軟件后,經過空三運算后,使用多視影像密集匹配技術生成密集點云,如圖4所示。地面物體越復雜,建筑物越密集,點的密集程度越高。
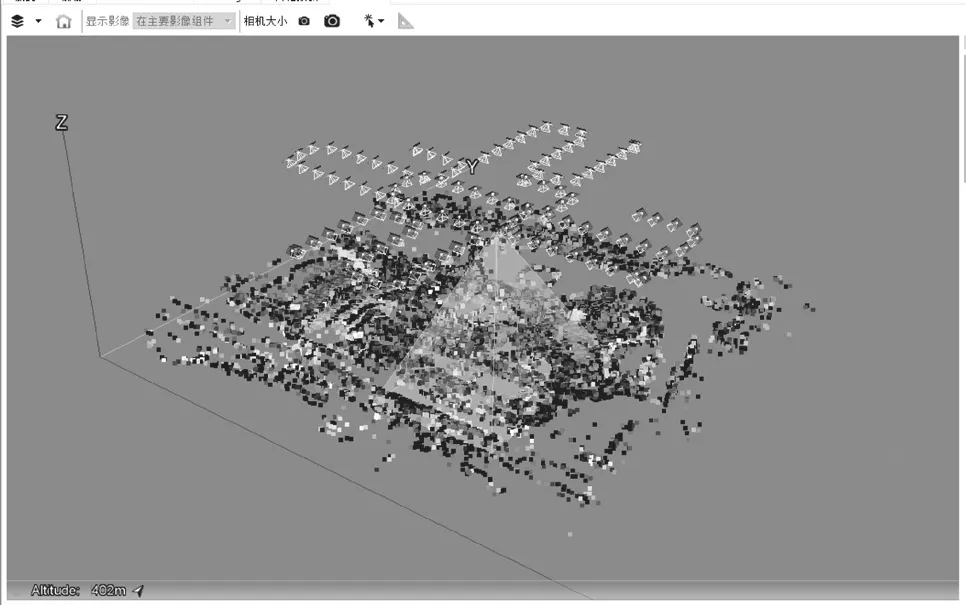
圖4 多視影像密集匹配
軟件經過空三運算和影像密集匹配的結果,構成了三角TIN,再構成白模,軟件自動將得到的紋理效果,映射到白模上,最終形成了實景三維模型數據,如圖5所示。
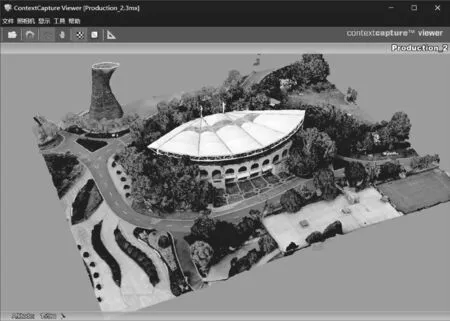
圖5 試驗區域實景三維模型
4 結語
本文從單鏡頭無人機的選擇,到比較不同的地面站工具,對單鏡頭無人機的實景三維建模進行了探索,實現了對某一區域的三維建模。與傳統五鏡頭或兩鏡頭傾斜攝影相比,單相機傾斜攝影方案成本更低,并且大幅度的提高了作業生產效率,在精度要求不是非常高的實景建模項目中具有較好的實際應用效果。經驗證,單鏡頭無人機實景三維建模,能適用于校園規劃、城市建設等,同時在自然災害監測、文物保護等領域也有一定的實際意義。但是本文操作實踐過程中也存在不足,文中并沒有進行像控點布設,這在一定程度上影響了建模精度;另外,輸出的模型沒有經過修復,存在模型的邊緣細節表現不夠準確,個別地物紋理缺失,建模地形與實際地形不一致等問題,這需要在今后的作業中不斷完善改進。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19