基于GNSS的平地控制系統優化設計與試驗
2021-06-18 06:41:06李曉宇董方園秦振豐
農業工程 2021年4期
關鍵詞:作業
李 由,張 吉,李曉宇,董方園,秦振豐
(上海聯適導航技術股份有限公司,上海 201702)
0 引言
農田土地平整度是影響土地灌溉效率和土壤礦物質均勻度的關鍵因素[1]。隨著我國農業向精準化發展,對農田平整度有更高要求,提高農田精細平整技術可有效增加土地利用率、改善土壤質量和滿足精細灌溉需求,以達到節水增產目的[2-3]。
目前,土地平整技術主要有激光平地技術和全球導航衛星系統(GNSS)平地技術,激光平地技術利用激光和液壓控制系統作為非視覺手段,實現農田土地的精細平整,但激光平地技術作業半徑小,易受外界環境影響,不適合平整高程差較大的土地[4-5]。GNSS平地技術通過GNSS差分定位獲取農田高程數據,通過實際高程與設定的基準高程差來控制鏟體的升降實現土地精細平整,具有集成度高、可視化強和效率高等優點,相較于激光平地技術應用前景更好[6-7]。
由于GNSS定位數據具有隨機誤差和離散性,使用GNSS定位高程數據進行閉環控制鏟體,容易導致平地鏟在田地振蕩形成肉眼可見的高低起伏——“波浪地”。因此,國內GNSS平地設備普遍在高速作業狀態下平地效果不好,而增大控制滯環有助于改善此現象,但會使平地鏟的控制精度降低[8-9]。基于此,中國農業大學劉剛團隊提出了一種濾波算法,可減少多徑效應和隨機誤差對高程測量的影響,但該算法運行成本高,需要對不同平地鏟做校準,難以商業推廣[10-11]。
針對上述問題,本文設計了一種農田土地精細平地控制系統,提出一種可控制時長的滯環控制算法,根據平地鏟的運動特征,對平地鏟控制動作在時間上進行精細劃分,以減少平地鏟超調,提高平地鏟的作業精度。
1 系統工作原理和總體設計
1.1 GNSS平地控制系統工作原理
GNSS平地控制系統主要由GNSS基站、GNSS天線、RTK-GNSS接收機、控制器、液壓系統、車載終端計算機和平地鏟設備構成,如圖1所示。
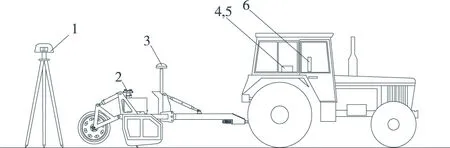
1.GNSS基站 2.液壓系統 3.GNSS天線 4.RTK-GNSS接收機 5.控制器 6.車載終端計算機圖1 GNSS平地系統組成Fig.1 GNSS flat level system composition
農田土地精細平地控制系統工作原理是利用RTK-GNSS接收機接收GNSS基站發送的差分信號獲取農田三維數據[12-17]。控制器實時接收RTK-GNSS接收機測量到的平地鏟絕對高程數據,通過車載終端計算機給控制器輸入基準高程作為平地機作業的基準面,在平整作業過程,控制器通過實時對比測量點的實際高程值與基準高程,根據當前地勢差值情況驅動液壓系統控制平地鏟完成土地平整。
1.2 GNSS平地控制系統總體設計
根據GNSS平地控制系統工作原理,結合國內外對GNSS平地控制的研究成果,提出了基于GNSS土地精平機電控制系統的優化方法,其中GNSS土地精平機電控制系統如圖2所示。
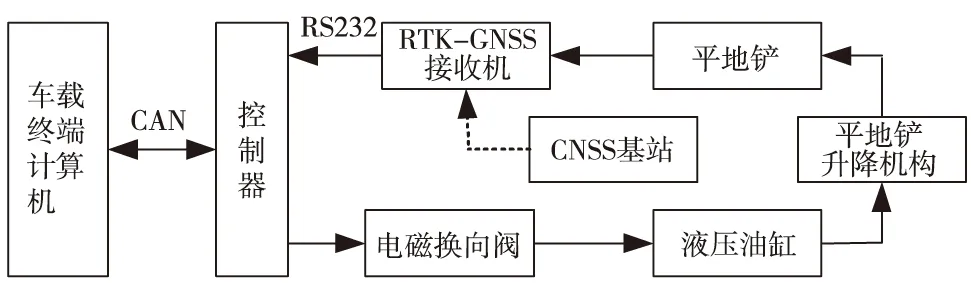
圖2 系統總體設計Fig.2 System overall design
GNSS系統選用上海聯適導航技術有限公司自主研發的R61接收機、GNSS天線和R25基站,R25基站內置GNSS高精度板卡、雙4G全網通訊模塊、藍牙模塊和無線電通訊模塊于一體。車載終端計算機使用上海聯適導航技術有限公司自主研發設計的T100車載平板,搭載Andriod系統,配合自主開發的GNSS平地上位機軟件來輔助平地作業。控制器采用Cortex-M3為核心處理芯片,集成RS232和CAN通訊電路,為滿足農業使用環境的需求,使用防水防塵的塑料外殼將平地控制器封裝在內,并將殼體固定在拖拉機駕駛艙內。液壓系統和鏟運裝置是農田平整的機械設備,液壓系統根據控制器的控制指令來開關電磁閥,改變液壓油的流向,使得液壓油缸柱塞產生位移來控制平地鏟體的升降。
2 控制方法
2.1 一般滯環控制算法
我國市場現有的平地機大都使用開關換向閥作為控制部件,開關換向閥只能控制液壓流向不能控制液壓流量,因此在換向閥流量相同的情況下,無論高程差大小,控制器只能通過判斷誤差方向及是否大于閾值來控制平地鏟升降。在自動控制模式下,控制器控制換向閥的周期一般與RTK-GNSS接收機輸出的定位數據更新周期相同,每當定位數據更新一次,控制器計算當前誤差,如果大于閾值則驅動電磁閥,執行相應的抬升下降動作。其控制流程如圖3所示。
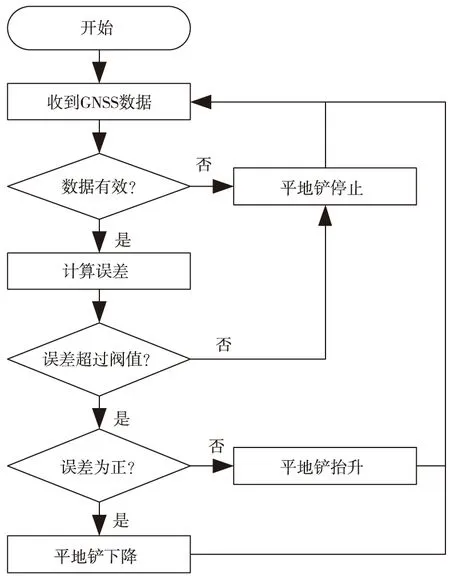
圖3 一般滯環控制算法流程Fig.3 Flow chart of general hysteresis control algorithm
由控制流程圖可知,一般滯環控制算法是根據平地鏟當前高程H1和基準高程H2計算誤差δ,通過閾值η與誤差δ的差值大小來控制平地鏟的升降,則有
δ=|H1-H2|
(1)
當δ<η時,平地鏟不進行高程調整,當δ>η時,控制器發送控制指令控制平地鏟升降,由于平地鏟在每個控制周期升降距離L是相同的,則有
ε=L-δ
(2)
當誤差ε>η時,表示調整鏟體高程時發生超調,超調導致平地鏟在滯環邊抖動,平整過的地面會有較多波浪形。
2.2 可變控制時長的滯環控制算法
針對GNSS定位數據有隨機誤差,使用一般滯環控制算法容易導致超調,本文提出一種可控制時長的滯環控制算法,通過控制電磁閥的通電時間,實現高精度的平地鏟升降控制。
平地鏟開關換向閥的閥芯開口大小恒定,電磁閥開啟后通過閥芯的液壓流量相對恒定,即液壓缸運動速度相對一致,因此在電磁閥工作時,平地鏟的上升速度和下降速度也相對一致。可以通過控制電磁閥的通電時間,來控制平地鏟的相對高度變化。考慮到平地鏟的抬升和下降時液壓系統負載不同,需要對平地鏟的抬升和下降速度做標定。為了取得相對準確的平地鏟上升速度Vu和下降速度Vd,先測得平地鏟極限高程變化量H,再多次測量上升行程總時間Tu和下降行程總時間Td,則Vu和Vd的計算公式為
(3)
每當定位數據更新后,將平地鏟和基準面的誤差δ與閾值η比較,如果|δ|>η,選擇對應得速度計算電磁閥通電時間t,則有
(4)
使用該方法后相當于將一個控制周期內的時間進行了細分,原來一個控制周期內平地鏟升降的距離是一個定值,該方法根據誤差計算通電時長,使得平地鏟剛好運動到閾值范圍,減少平地鏟超調引起的震蕩。
3 GNSS平地試驗與分析
3.1 試驗材料與方法
為了驗證本文提出的控制方法可行性,選取黑龍江省建三江管局七星農場的一塊500 m×500 m地塊,使用拖拉機作為牽引車,牽引2.5 m幅寬的GNSS土地精平設備,試驗環境如圖4所示。

圖4 試驗場地Fig.4 Test site
田間試驗及數據采集:首先使用GNSS平地系統將試驗地塊平整一遍,使地塊相對高差不超過5 cm,然后抬高基準面使得鏟刀離地5 cm左右,記錄基準高程。分別使用上述一般滯環控制算法和可變控制時長的滯環控制算法,設置閾值1.5 cm,分別在地塊中用4和9 km/h的速度自動作業,沿固定的路徑繞圈行駛,并通過CAN各采集1 h試驗數據,使用Excel篩選統計數據。
3.2 試驗結果與分析
本試驗用于驗證本文設計的GNSS土地機電精平控制系統完成作業后所能達到的效果,需要在已經基本平整完成的地塊中進行,將平地鏟抬離地面是為了防止平地鏟破壞地形導致無法對比數據。本文主要對比基準面±1.5 cm范圍內點的占比,±2 cm范圍內點的占比,執行控制動作的控制周期占比(動作占比),高程值穿越閾值范圍的次數(翻轉率),以及高程值在2 s內變化超過4 cm的點(突變率),試驗數據統計結果如表1所示。
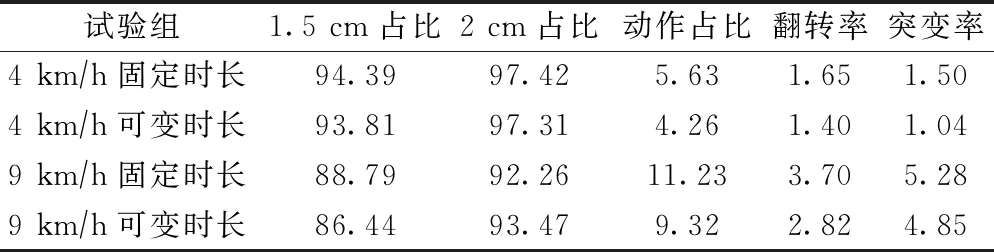
表1 試驗數據統計Tab.1 Test data statistics 單位:%
通過試驗數據可知,在低速作業狀態下,使用可變時長滯環控制算法時平地鏟動作占比由一般滯環控制算法的5.63%減小到4.26%,同時平地鏟的翻轉率由1.56%減小到1.40%,定位高程值的突變率由1.50%減小到1.04%;在高速作業狀態下,使用可變時長滯環控制算法時平地鏟動作占比由一般滯環控制算法的11.23%減小到9.32%,同時平地鏟的翻轉率由3.70%減小到2.82%,定位高程值的突變率由5.28%減小到4.85%。采用改進后的可變時長滯環控制算法,明顯減少了液壓缸的動作,并且減少了平地鏟在基準面附近震蕩的情況,更低的突變率也會使得平整過的地面看起來更平緩,特別是高速情況下的數據,說明可變時長的控制方法可以明顯改善高速作業下“波浪地”的問題。
4 結論
本文設計完善了基于GNSS的精準平地控制系統,提出一種可變時長滯環控制算法,該方法根據誤差計算電磁閥的通電時長,相當于將一個控制周期內的時間進行了細分,可有效減少平地鏟因超調而在基準面附近震蕩。經室外測試驗證,平地系統在低速作業下可減少15%的震蕩,在高速作業時可減少23%的震蕩,同時也有效降低了平地鏟的高程突變,在低速作業時減少30%,在高速作業時減少8%的突變。無論高速還是低速作業,都能保證90%以上的點在±2 cm以內,滿足土地平整的精度要求,符合推廣應用。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
