蕓豆智能除草機器人總體結(jié)構(gòu)設(shè)計*
2021-06-18 06:14:54董曉威
南方農(nóng)機 2021年11期
關(guān)鍵詞:雜草結(jié)構(gòu)
王 明 , 董曉威 , 王 森 , 張 冰
(黑龍江八一農(nóng)墾大學(xué)工程學(xué)院,黑龍江 大慶 163319)
0 引言
蕓豆是一種重要的豆科經(jīng)濟類作物,學(xué)名菜豆,俗稱二季豆或四季豆。蕓豆田里主要出現(xiàn)的雜草有稗草、狗尾草、野黍、野燕麥等十幾種,可采用人工或化學(xué)除草[1]。隨著生活水平的提高和消費觀念的轉(zhuǎn)變,市場對無公害、有機蔬菜的需求不斷增加;同時國家也在大力提倡綠色農(nóng)業(yè),改善農(nóng)業(yè)農(nóng)村環(huán)境,推進農(nóng)業(yè)資源高效利用及生態(tài)農(nóng)業(yè)建設(shè)。機械除草工作效率較高、對環(huán)境污染小,符合綠色農(nóng)業(yè)的發(fā)展需要,是有機農(nóng)業(yè)種植過程中最佳的除草方式。
國內(nèi)外學(xué)者進行了不同類型除草機器人的相關(guān)研究,近年來持續(xù)增加投入,性能不斷提高[2]。Bawden等人基于模塊化設(shè)計方法,研制了一種多模式作業(yè)的除草機器人,配備了智能視覺識別系統(tǒng),可根據(jù)作業(yè)的實際情況選擇機械除草或化學(xué)除草[3]。Utstumo等人設(shè)計了一種能夠進行精確施藥的智能除草機器人,大幅度地降低了除草劑的使用量[4]。Sori等人研制了一種全自動智能水田除草機器人,通過攪拌土壤阻止雜草進行光合作用,從而達到去除雜草的目的[5]。周俊等人針對除草機器人的導(dǎo)航系統(tǒng)進行了深入的研究,對提高機器人除草準確性和效率具有重要的意義[6-7]。王璨和孫俊等人提出了基于圖像特征和人工神經(jīng)網(wǎng)絡(luò)的雜草識別模型,能夠提高除草機器人雜草識別的準確性,進而提高除草效率[8-9]。筆者針對蕓豆種植過程中雜草的去除問題,設(shè)計了基于機器視覺識別技術(shù)的兩種除草機器人的總體結(jié)構(gòu),分別為輪式和履帶式,以滿足蕓豆綠色除草的工作要求。
1 輪式除草機器人
1.1 除草刀設(shè)計
剪切式除草刀主要由整體支架、刀片、動力裝置組成,具體結(jié)構(gòu)如圖1所示。剪切式刀具除草精度較高,但效率較低。
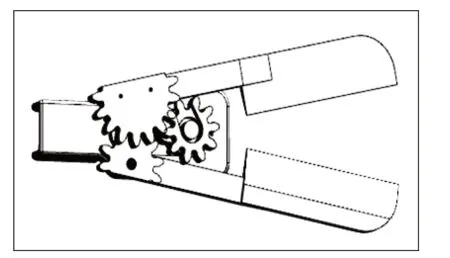
圖1 剪切式刀具
1.2 整體結(jié)構(gòu)
除草機器人的結(jié)構(gòu)如圖2所示,采用剪切式刀具,除草刀及機械臂的動作由舵機進行控制,對雜草的適應(yīng)性強。該智能除草機具有結(jié)構(gòu)簡單、運行穩(wěn)定、除草準確、不易堵塞的特點。
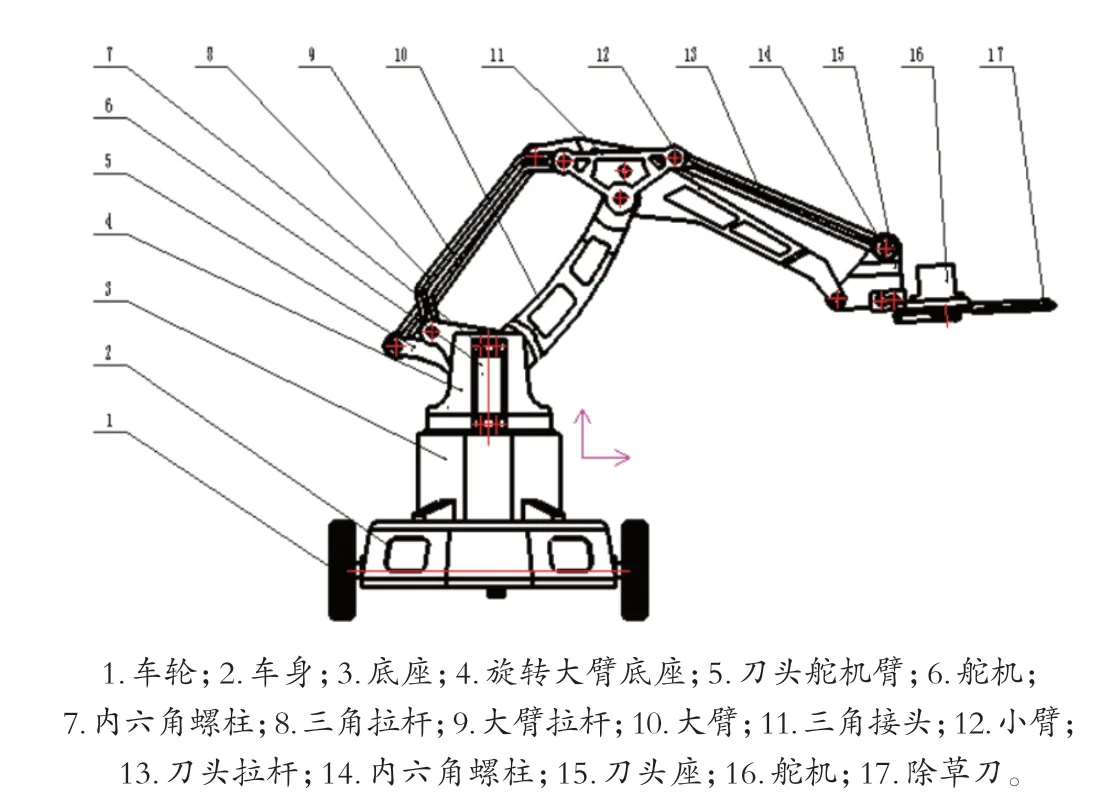
圖2 輪式除草機器人結(jié)構(gòu)簡圖
2 履帶式除草機器人
2.1 除草刀設(shè)計
除草刀片結(jié)構(gòu)如圖3所示,為了保證其使用要求,材料選用65Mn鋼,硬度一般為42~50 HRC。刀盤采用花鍵軸和螺釘進行定位并保證精度,使用緊固螺釘和墊片固定。刀盤與發(fā)動機輸出軸的動力傳輸為花鍵,在花鍵軸上加工一個直徑為3 mm的螺紋孔,并通過平頭螺釘頂緊發(fā)動機輸出軸上的豁口以達到夾緊的作用。

圖3 刀片結(jié)構(gòu)
刀頭罩結(jié)構(gòu)如圖4所示,在工作的過程中會產(chǎn)生一定的震動,材料選用HT100,該材料滿足精密鑄造加工的使用要求,同時具有吸震、自潤滑性、高壓縮性等特點,可用于箱體、殼體、滑軌等工件的鑄造加工。工件下部分形狀為半包圍結(jié)構(gòu),上部設(shè)置安裝調(diào)角接頭的接口,通過M6×45的螺栓與調(diào)角接頭連接,固定在旋刀臂的前端。刀頭罩能夠?qū)⑤^高雜草壓倒至旋刀工作高度,提高除草效率;同時起到安全防護與聚攏雜草的作用,避免刀片高速旋轉(zhuǎn)過程中對操作人員的意外傷害。刀盤高速旋轉(zhuǎn)時會產(chǎn)生較大的氣流,被切斷的草屑會隨著氣流旋轉(zhuǎn)并排出,避免由于草屑堆積造成刀盤停轉(zhuǎn)的情況發(fā)生。

圖4 刀頭罩結(jié)構(gòu)
2.2 整體結(jié)構(gòu)
履帶式除草機器人結(jié)構(gòu)如圖5所示,采用雙回旋式刀頭,在一定范圍內(nèi)可調(diào)節(jié)高度和寬度以適應(yīng)不同的壟間距。攏草耙功能為除草后雜草的收集和清理,材料為尼龍,具有彈性好、耐磨性高、價格低廉的優(yōu)點。刀頭的旋轉(zhuǎn)由一個直流電機進行驅(qū)動,刀頭和攏草耙的升降由舵機控制;移動底盤為履帶式,能夠適應(yīng)復(fù)雜的地面情況。該機器人具有結(jié)構(gòu)緊湊、操作簡單、運行穩(wěn)定、移動方便、除草效率高的特點。
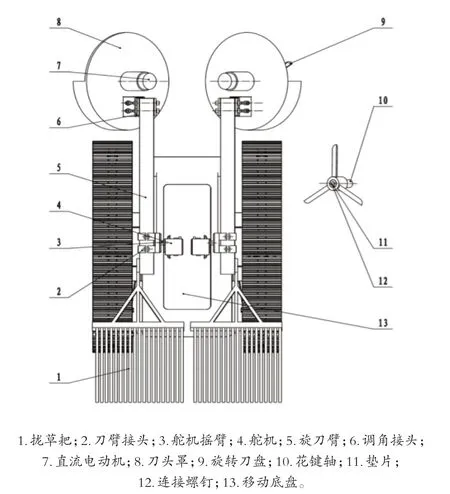
圖5 履帶式除草機器人結(jié)構(gòu)簡圖
3 結(jié)論
筆者設(shè)計了基于視覺識別技術(shù)的輪式和履帶式兩種除草機器人的總體結(jié)構(gòu)。輪式除草機器人采用剪切式刀具,具有結(jié)構(gòu)簡單、運行穩(wěn)定、除草準確、不易堵塞的特點,但除草效率相對較低;履帶式除草機器人采用可調(diào)節(jié)雙回旋式刀頭,配有攏草耙,可進行雜草的收集和清理,具有結(jié)構(gòu)緊湊、操作簡單、運行穩(wěn)定、移動方便、除草效率高的特點。
猜你喜歡
科教新報(2022年22期)2022-07-02 12:34:28
今日農(nóng)業(yè)(2021年5期)2021-11-27 17:22:19
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
高中生學(xué)習·閱讀與寫作(2019年2期)2019-09-10 07:22:44
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
現(xiàn)代農(nóng)業(yè)(2015年5期)2015-02-28 18:40:49
土木建筑工程信息技術(shù)(2013年2期)2013-10-17 03:14:12