Pixhawk飛控在無人機中的應用研究
2021-06-18 02:44:26盧孟常
信息記錄材料 2021年5期
盧孟常
(貴州航天職業技術學院 貴州 遵義 563000)
1 引言
Pixhawk系列飛控一經推出就廣受好評,這主要得益于其硬件和軟件完全開源且功能強大,無人機設計公司和無人機愛好者可以來做應用研究和二次開發。因該飛控系列產品還在不斷推陳出新,性能在不斷完善,在利用軟件進行調參時,相對其他飛控產品較復雜,易出現無法解鎖、調試失敗的情況,這就需要使用者對飛控的應用功能和調試故障進行深度分析、總結發生問題的成因,針對以上問題,本文做了一定程度的歸納和總結。
2 Pixhawk飛控簡介
目前市場上的無人機飛控品牌繁多,比如:大疆、零度智控、極翼、APM和PIX(Pixhawk)等,其硬件結構基本都集成了陀螺儀、加速度計、磁力計、GPS、氣壓計等,這些傳感器與飛控的MCU以及伺服機構控制單元共同配合控制,保證了無人機飛行姿態的穩定。Pixhawk飛控是著名飛控廠商3DR推出的新一代開源、高效的飛行控制器[1]。功能上支持多旋翼、固定翼和直升機等多種無人機型,配合Mission Planner地面站軟件使用,可以完成對飛控的在線燒寫固件、調參,使用無線數據傳輸系統建立地面站與自駕儀之間的通信,構建了一套無人機自動控制系統[2]。Pixhawk飛控的前身是APM飛控,后面通過傳感器和主控芯片的升級推出了PX4,在PX4的基礎上又推出了Pixhawk。Pixhawk的飛行控制器采用的是雙處理器結構,即由一個主處理器和一個備用處理器構成,這樣設計的好處是當主處理器出現異常死機,備用處理器可以接管過來繼續正常工作,極大地保障了系統的可靠性和穩定性。
3 Pixhawk飛控調試
Pixhawk飛控的調參與地面站航線規劃所采用的是Mission Planner(以下稱MP軟件)軟件,它是一款多功能無人機地面站專業軟件,在Windows系統下運行。可以為固定翼、旋翼機和直升機等多種無人機飛控提供參數配置或動力學控制。此外MP地面站軟件還具有以下主要功能:通過地圖進行航線規劃完成自動任務、下載及分析任務記錄、提供無硬件下的飛行模擬器連接、監控飛行器狀態,記錄電臺傳遞數據等。若想實時獲取無人機當前的飛行數據、軌跡和狀態,還需在無人機飛控和電腦端各連接一個無線數傳電臺,即在天空端和電腦端安裝一對數傳模塊。
首先,用USB數據線將飛控與安裝有MP地面站軟件的電腦連接上,打開軟件MP軟件,建議采用“AUTO”(自動)模式來連接飛控。在調試之前,建議將飛控、GPS模塊、電調、接收機、蜂鳴器、安全開關等無人機硬件全部接上,將電機螺旋槳和動力電池處于拔除狀態,其基本調試步驟如下:
3.1 機架類型選擇
在MP軟件的“初始設置”菜單中,打開“必要硬件”選項,單擊“機架類型”,選中“Frame Class”中與實際無人機機架相符的圖標,然后在“機架類型”中選擇與實際機架一樣的選項。
3.2 加速度計校準
加速度計校準即三軸加速度計/陀螺儀的調試。在加速度計校準中有“校準加速度計”和“校準水平”兩項內容。首先進行加速度計校準,根據提示擺放無人機逐一點擊“完成時點擊”按鈕進入下一步。提示“Please place vehicle LEVEL”,無人機水平箭頭方向指向自己;提示“Please place vehicle LEFT”,將無人機向左擺放,即箭頭指向自己,左側向下轉90°,與地面垂直;提示“Please place vehicle RIGHT”,將無人機向右擺放,即箭頭指向自己,右側向下轉90°,與地面垂直;提示“Please place vehicle NOSDOWN”,將無人機向下擺放,即箭頭指向地面,與地面垂直;提示“Please place vehicle NOSEUP”,將無人機向上擺放,即箭頭指向上,垂直與地面;提示“Please place vehicle BACK”,無人機倒過來,上面朝下,水平擺放。
水平較準:根據提示將無人機水平放置,點擊“校準水平”,注意不要移動無人機,等待一會,就會提示完成。
3.3 指南針校準
指南針(羅盤)校準是飛控校準至關重要的一步,無人機在自動駕駛模式中的定位信息來源于此,Pix飛控支持連接三個指南針(飛控內部一個,外部可裝二個,一般外部只裝一個)。調試前,先確保外部指南針已安裝連接好,指南針的箭頭方向與飛控板箭頭指向的位置要指向同一方向,且在調試過程中飛控與指南針不要發生位移,否則會出現不同步而導致飛行姿態發生偏移。在MP軟件的“初始設置”菜單中,打開“必要硬件”選項,單擊“指南針”,在彈出的調試界面中,按需要設置指南針選項(一般采用默認),點擊“開始”按鈕,開始旋轉無人機,把每個角度都旋轉到位,觀察界面的兩個進度條,mag1是GPS外部羅盤,mag2是飛控內部羅盤,待兩個進度條都達到99%后顯示數據表示校準成功,之后飛控要斷電重新連接地面站。如果進度不再增加或聽到兩聲失敗音,點擊“取消”重新校準,若是不能,則重連飛控。
3.4 遙控器校準
調試前,先確保遙控器與接收機已對碼成功,接收機與飛控已連接好,遙控器的各個控制通道(包括三段開關)與中立都已在遙控器上設置完畢。打開遙控器開關,在MP軟件的“初始設置”菜單中,打開“必要硬件”選項,單擊“遙控器校準”。此時會彈出一個對話框提示你確定打開了遙控器、電池沒有連接、螺旋槳沒有安裝,點擊“OK”后進入下一步,此時在遙控器上拉動所有通道的控制桿和撥動開關的行程極限,觀察無線校準條上紅線的位置,即最大值和最小值。點擊“完成”按鈕,此時會彈出一個詢問是否全部校準完的對話框,點擊“OK”后彈出對話框顯示校準數據的信息,校準結束。
3.5 飛行模式設置
打開“必要硬件”選項,選擇“飛行模式”。打開遙控器,撥動SWG三段開關,可以看到對應的飛行模式會呈現綠色。設置的飛行模式選項有: PosHold(定點)、 Loiter(懸停、留待)、AltHoLd(定高)、RTL(返航)、Stabilize(自穩模式),選擇好需要設置的模式后,點擊“保存模式”即可。
3.6 故障保護設置
打開“必要硬件”選項,選擇“故障保護”,在界面的右側將電池的報警最低電量和電池容量設置好,再設置故障保護類型,有Enabled always RTL(總是返航)、RTL(返航)等幾種模式可供選擇。
3.7 電池監視器
電池監視器主要用來對電池的電壓電流消耗情況進行監測,獲取低電量警報。在“初始設置”菜單中的“可選硬件”中點擊“電池監視器”,在彈出的對話框中填入電池的實際信息,注意在“校準”選項欄中,只需填寫“測量電池電壓”一欄,采用萬用表測量電池的實際測量值填入即可。
3.8 電調校準
此為飛控調試的最后一步,也最需要注意安全。校準前,請確保無人機上沒有安裝螺旋槳,數據線沒有連接在PC端,接收機與飛控已連接良好。首先,打開遙控器將油門桿推到最大值保持不動(如果遙控器是油門回中的,需要有一人拉住油門桿)接上動力電池,等待一會LED燈循環亮畢,迅速拔掉電池,此時保持油門依然為最大值不動。接著,長按安全開關待其常亮,待電調發出“滴滴”幾聲后,迅速拉下油門桿到最低位不動,隨后發出一聲長音,表明電調校準已完成,當緩緩抬起油門桿時電機轉速也應隨之提高,最后,將動力電池拔掉后重新上電,整個調試完成。若重新上電后出現紅綠藍燈交替閃爍、蜂鳴器急促鳴叫情況,則需要重新校準。
4 Pixhawk飛控故障分析
使用者在進行飛控調試時,常常會因為硬件安裝不規范、連線松動、固件未升級等原因導致的故障比較多,這些故障不排除,會使無人機無法解鎖或飛行姿態異常而導致炸機,Pixhawk飛控板上有紅、黃、藍、紫四種顏色的LED指示燈(是一顆可以發出多種顏色光的多彩LED燈),可以方便使用者通過觀察LED燈的顏色、同時結合飛控板所接蜂鳴器發出的鳴叫聲來判斷故障現象。首先來了解一下LED燈顏色與蜂鳴器鳴響聲的含義,見表1。
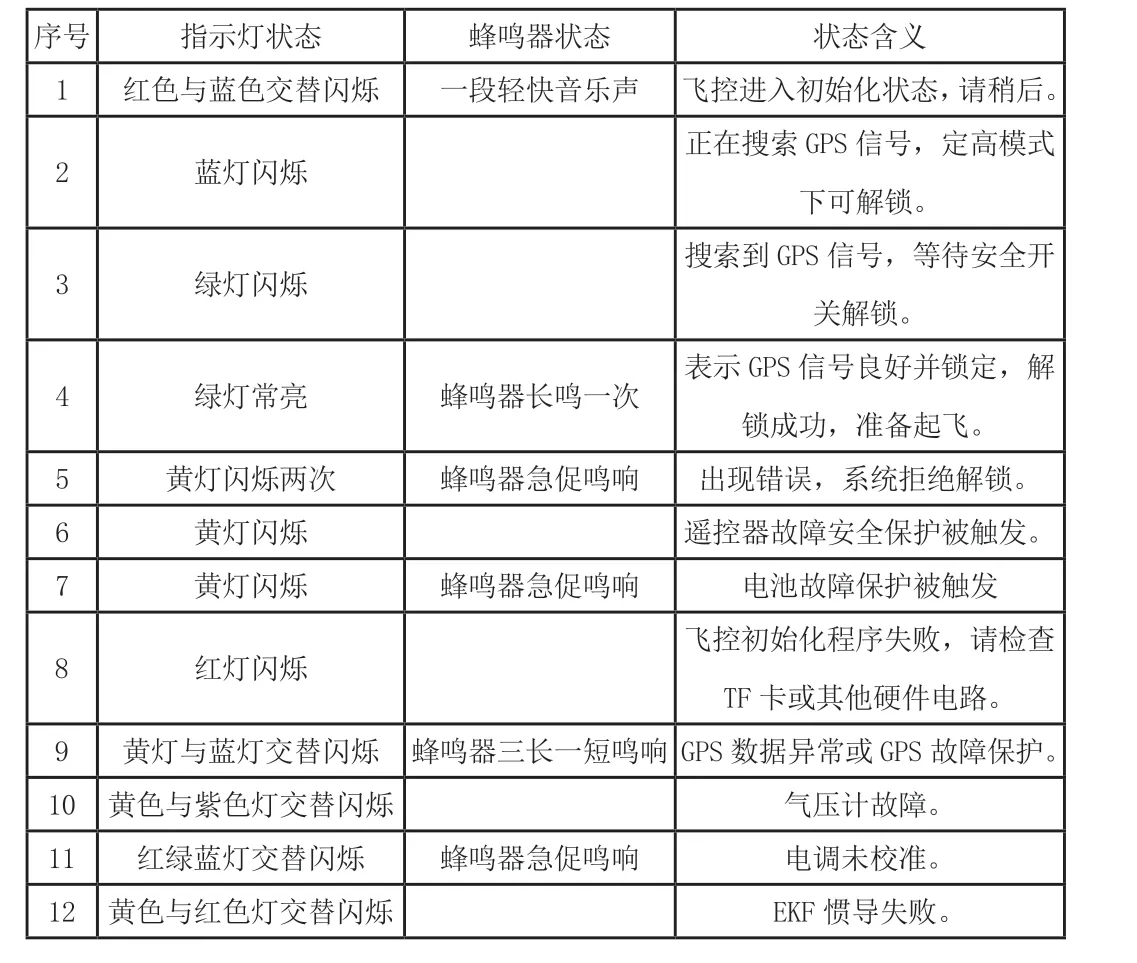
表1 指示燈與飛控狀態對照表
此外,可以通過觀察安全開關自帶的LED燈閃爍情況分析飛控系統情況,其含義如下:
(1)LED燈持續快速閃爍:系統初始化自檢中,請稍等;
(2)LED燈間歇閃爍:系統就緒,長按安全開關按鈕解鎖系統;
(3)LED燈常亮:安全開關已解鎖。
下面分析一下Pixhawk飛控調試中容易出現的典型問故障。
4.1 無法解鎖故障
此故障是出現最多的一種,無法解鎖的原因也各不相同,總體說來多是因為調參不正確和硬件連接錯誤引起的,一般我們可以通過查看MP地面站軟件飛行數據窗口上端的英文提示來分析原因,其中英文故障對照如表2所示[3]。

表2 HUD界面顯示與故障原因對照表
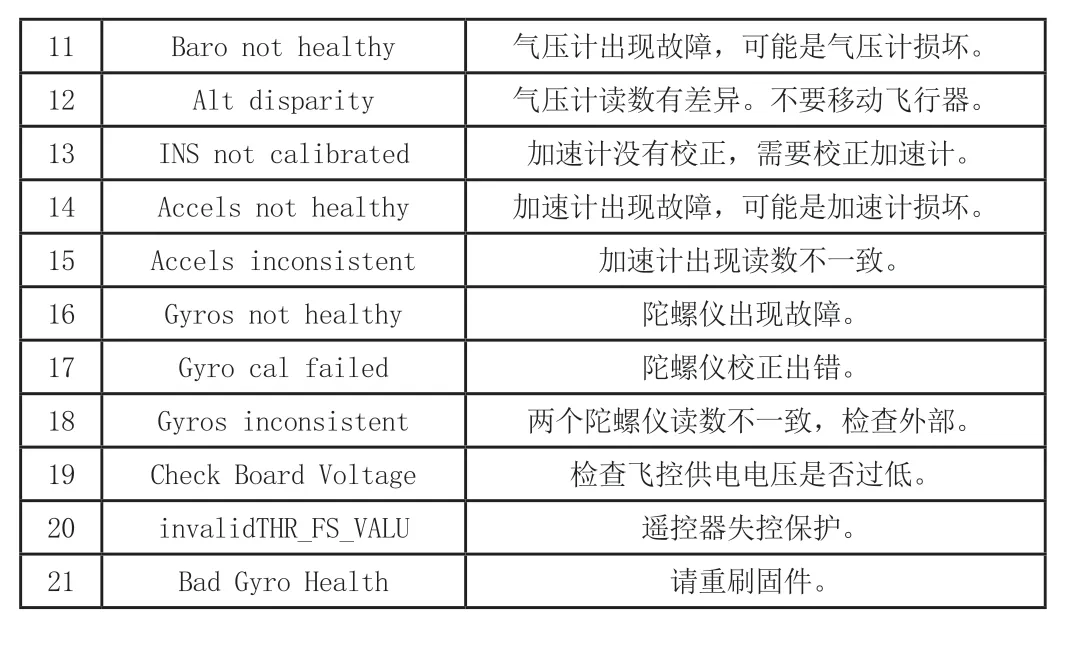
11 Baro not healthy 氣壓計出現故障,可能是氣壓計損壞。12 Alt disparity 氣壓計讀數有差異。不要移動飛行器。13 INS not calibrated 加速計沒有校正,需要校正加速計。14 Accels not healthy 加速計出現故障,可能是加速計損壞。15 Accels inconsistent 加速計出現讀數不一致。16 Gyros not healthy 陀螺儀出現故障。17 Gyro cal failed 陀螺儀校正出錯。18 Gyros inconsistent 兩個陀螺儀讀數不一致,檢查外部。19 Check Board Voltage 檢查飛控供電電壓是否過低。20 invalidTHR_FS_VALU 遙控器失控保護。21 Bad Gyro Health 請重刷固件。
除了在地面站調試過程中因參數設置與調試方法不當引起的,還有一部分是其他原因導致的,下面分析一下。
4.1.1 飛控板接插件接觸不良。Pixhawk飛控板與外部電路是通過十幾個排插座連接起來的,這種排插座的優點是拔插便捷,方便更換,而缺點是極易造成接觸不良,因此在調試飛控和正常飛行前都要檢查好排插線是否松動、接觸是否緊密,接觸點是否有氧化等問題。事實上,導致調試失敗很大概率是某一接插件接觸不良引起的,而無人機在正常飛行過程中若出現接觸不良時,會直接導致炸機。因此,為了保證后期使用的可靠性,可在飛控調試結束后,用硅橡膠涂覆到接插件上,待膠水固化后可有效隔絕空氣并防止松動,其實,最有效的方法就是直接焊接上去,但后期更換元件時會比較麻煩。
4.1.2 飛行模式切換不正確。先確定加速度計校準、指南針校準、遙控器校準和電調校準等各部分的校準都是按調試步驟進行并成功完成了的。有時飛行模式未設置正確也會導致黃燈雙閃無法解鎖,我們可以通過來回切換“定高”“定點”和“返航”等三種飛行模式的方法有時也能恢復正常。
4.1.3 固件下載版本不對或未升級。在做了重新調試和檢查硬件都無法解決的情況下,就要考慮是否是固件版本不對或沒有升級的原因了,固件升級有自動和手動兩種方式,自動較為方便,在MP軟件中單擊菜單的“初始設置”,選中自己所需的機型就可以自動升級固件了,但有時會出現自動升級失敗問題,這時可以到官方網站上去手動下載,再從軟件中導入即可。
4.2 飛行姿態異常
4.2.1 飛控減震措施不良。在安裝飛控時,一般是通過一個彈性減震膠墊固定在機架上的,可以起到很好的減震作用,飛控內部的加速度計傳感器和陀螺儀采集無人機當前的飛行姿態數據反饋到飛控中央處理器中進行運算,因此對飛控的減震保護非常重要。若將飛控用膠粘死在機架上,會使飛控因無減震緩沖而導致無人機飛行姿態異常。
4.2.2 外部指南針松動。在做加速度計和指南針校準之前,應確保指南針已緊固在機架上不會松動,若無人機在飛行過程中指南針發生位移,極有可能導致無人機飛行姿態異常發生側翻。
4.2.3 電調與飛控連接線序錯誤。飛控與電調連接時要按對應的接口連接起來,哪怕其中一組接錯都會導致無人機瞬間側翻,這點與裝錯螺旋槳的后果是一樣的,檢查無誤后,請重新校準電調。
4.3 遙控器控制異常
遙控器校準好后,其各通道應對應無人機相對的位置。若遙控器校準不正確,會使飛控接收混亂指令導致控制異常。
4.3.1 在地面站軟件中重新校準遙控器,同時檢查遙控器通道輸出設置、舵桿的中立位置以及行程量等關鍵參數,有些遙控器參數設置較為復雜,建議對照使用手冊進行逐項設置。
4.3.2 先檢查遙控器接收機與飛控的接口接線是否正確、各通道輸出與飛控接線是否有錯接、漏接。
4.3.3 以上都不能解決的話,可以將遙控器與接收機重新對頻,或者更換接收機試一下。
4.4 GPS定位異常
4.4.1 請先確認遙控器是否切換到了定點(PosHold)模式。無人機只有在定點和懸停(Loiter)模式下才可以實現精確定位,但有時因為天氣原因或地理位置的影響,GPS信號不好,在GPS模式下無法解鎖,而在定高(AltHold) 模式下則可以,有可能是操作者誤切換了模式導致,可用定高模式解鎖后再切換回去即可,當無人機在出現姿態異常時,通過來回切換飛行模式有時也可恢復正常。
4.4.2 GPS信號差。受天氣影響,比如雨雪天氣,或周邊環境影響,高大建筑或樹木遮擋等,GPS信號不好導致無人機定位不準而出現漂移。根據GPS的定位原理,當衛星數量大于等于4顆時,地面的GPS接收機才可以產生定位信息,衛星數目越多定位越精準,因此請盡量在開闊地操作無人機。
4.4.3 指南針松動或沒有校準。指南針松動會導致定位不準,檢查指南針支架是否松動、指南針的箭頭與飛控的箭頭指向是否一致,核對緊固后重新校準指南針。
4.4.4 遙控器未校準。在進行遙控器校準時各通道沒有對應相應的位置,飛控接收的指令混亂而導致定位異常,重新校準遙控器可恢復。
4 結語
作為一款性能優良的全免費開源飛控,Pixhawk飛控擁有巨大的商業開發價值,設計一款高性能的飛控耗費巨大,很多無人機研發企業都選擇使用Pixhawk開源飛控并進行二次開發創新。本文重點闡述了Pixhawk飛控的調試操作步驟、注意事項和出現的各種典型故障分析,希望給Pixhawk飛控使用者提供一定的幫助。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年12期)2018-08-01 00:47:44
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
汽車維護與修理(2016年10期)2016-07-10 08:17:41
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
