電動(dòng)汽車插補(bǔ)耦合無線充電技術(shù)的研究
2021-06-21 05:21:40鄧明陽郭應(yīng)時(shí)
鄧明陽,郭應(yīng)時(shí)
(1.長(zhǎng)安大學(xué) 汽車學(xué)院,陜西 西安 710064;2.長(zhǎng)春工業(yè)大學(xué)人文信息學(xué)院 汽車工程學(xué)院,吉林 長(zhǎng)春 130122)
0 引 言
目前,電動(dòng)汽車已經(jīng)逐漸代替燃料汽車進(jìn)入市場(chǎng),但因?yàn)殡姵乩m(xù)航短、充電樁定點(diǎn)設(shè)置難等問題,電動(dòng)汽車一直無法全面推廣使用。為解決車輛無法移動(dòng)充電的難題,筆者設(shè)計(jì)了一種移動(dòng)式無線充電裝置,提出了一種基于插補(bǔ)耦合技術(shù)的智能精準(zhǔn)定位方法,該方法可快速地控制地面端充電線圈精準(zhǔn)對(duì)正車載線圈,并使兩者達(dá)到有效充電距離;同時(shí)利用反饋模塊對(duì)充電過程的電流進(jìn)行自適應(yīng)控制,消除了電池浮充現(xiàn)象。然后根據(jù)畢奧-薩伐爾定律計(jì)算了有效充電距離D和線圈半徑R的理論數(shù)值。最后采用計(jì)算機(jī)迭代仿真實(shí)驗(yàn)驗(yàn)證了充電線圈半徑R和充電距離D的最佳取值,即R=40 cm、D=10 cm。
1 電動(dòng)汽車無線充電技術(shù)理論
電動(dòng)汽車無線充電技術(shù)即在有效距離內(nèi)采用非接觸式傳輸電能的技術(shù),其原理是在車載受能端和地面充電供能端的磁場(chǎng)建立電能傳輸通道,將電能轉(zhuǎn)化磁場(chǎng)能,以松耦合非接觸電氣隔離模式傳輸大功率電能[1-2],受能端產(chǎn)生的電能經(jīng)過整流后供電池存儲(chǔ)。無線充電主要有電磁感應(yīng)式、電磁共振式和射頻式3種傳輸方式[3],它們的電能傳輸距離和傳輸功率各不相同,詳見表1。
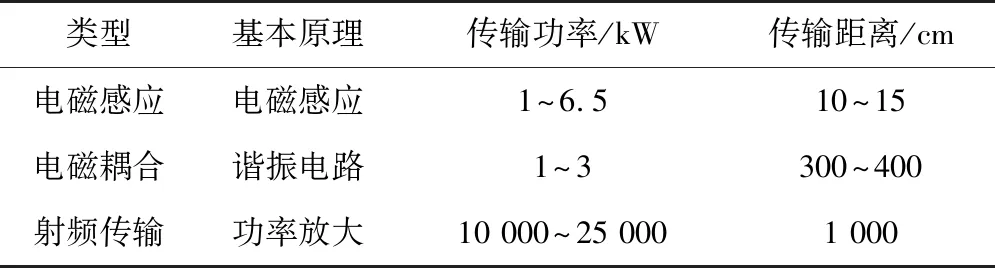
表1 無線充電傳輸類型Table 1 Transmission type of wireless charging
電磁感應(yīng)式充電是以磁場(chǎng)為充電媒介實(shí)現(xiàn)無電氣連接的電能傳輸,其工作頻率一般為幾十到幾百赫茲,近距離傳輸效率約90%,但受限于供能端和受能端距離[4]。電磁耦合共振式充電即收發(fā)端諧振線圈相同的固有頻率產(chǎn)生電磁共振來傳輸能量[5]。射頻式無線充電技術(shù)是以射頻信號(hào)為載體,利用發(fā)射端功率放大器產(chǎn)生的射頻信號(hào)傳輸電能,接收端經(jīng)過高頻整流后重新轉(zhuǎn)換為電能使用[6]。筆者所設(shè)計(jì)的是一種電磁感應(yīng)式無線充電裝置,以車載固定位置線圈和地面移動(dòng)充電線圈形成的磁場(chǎng)為載體,充電電流經(jīng)過變換形成高頻電流后轉(zhuǎn)化成磁場(chǎng)能,利用磁場(chǎng)傳輸給車載線圈,再經(jīng)過整流后形成可用的直流電,供汽車動(dòng)力電池儲(chǔ)存使用,為純電動(dòng)汽車?yán)m(xù)航提供保障。
2 插補(bǔ)耦合無線充電裝置設(shè)計(jì)
筆者基于電磁感應(yīng)原理來設(shè)計(jì)地面可移動(dòng)供電端,通過智能控制確保電能收發(fā)端在有效距離內(nèi)按照反饋信號(hào)不斷調(diào)整,確保無線充電時(shí)通過接收端線圈的磁通量最大。電動(dòng)汽車無線充電過程涉及的主要功能模塊有交流電源、高頻模塊、發(fā)射裝置、接收裝置、整流模塊和充電控制等,電能在各個(gè)模塊中的流向如圖1(a)。
2.1 電能傳輸過程
整個(gè)充電過程是利用磁場(chǎng)進(jìn)行電能傳輸來完成的。地面供能端將電能轉(zhuǎn)化成磁場(chǎng)能,受能端將磁場(chǎng)能轉(zhuǎn)化成電能。利用電磁感應(yīng)理論,地面供能線圈及外圍電路將電能(交流電)轉(zhuǎn)化為可傳輸?shù)拇艌?chǎng)能;車載受能線圈及外圍電路主要將磁場(chǎng)能轉(zhuǎn)化為可供動(dòng)力電池用的電能(直流電)。標(biāo)準(zhǔn)電流經(jīng)過變頻模塊在供能端形成高頻交流電,并在發(fā)射裝置中產(chǎn)生磁場(chǎng),從而電能轉(zhuǎn)化成磁場(chǎng)能;再將磁場(chǎng)能傳輸?shù)浇邮斩耍瑥亩艌?chǎng)能轉(zhuǎn)化成電能;經(jīng)過整流模塊(含濾波部分)轉(zhuǎn)化成可用的直流電。整個(gè)過程歷經(jīng)電能轉(zhuǎn)化為磁能再轉(zhuǎn)化為電能的過程[7],如圖1(b)。

圖1 無線充電裝置的整體結(jié)構(gòu)及電能轉(zhuǎn)化示意Fig.1 Schematic of overall structure and electric energy conversion for wireless charging device
2.2 插補(bǔ)耦合技術(shù)定位有效充電距離
無線充電的研究需要解決確保傳輸最大磁場(chǎng)能的問題。由磁場(chǎng)的高斯定理可知,在有效充電距離內(nèi),電磁感應(yīng)傳輸功率可達(dá)90%。圖2為有效距離的確定過程,分2步完成:
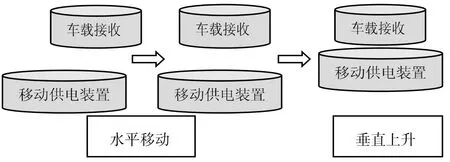
圖2 反射端自動(dòng)循跡的過程Fig.2 Process of automatic tracking at the reflective end
1)當(dāng)車輛停穩(wěn)后,受能端位置固定,地面可移動(dòng)的供能端采用自動(dòng)循跡方式在水平面內(nèi)移動(dòng),供能端中心點(diǎn)逐漸向車載受能端中心點(diǎn)搜索移動(dòng),當(dāng)供電端中心傳感器與車載接收端中心基點(diǎn)投影重合時(shí),兩個(gè)線圈穿過的磁感線方向一致,數(shù)量相同,此過程稱為“水平面位移循跡”[8]。
2)當(dāng)磁場(chǎng)中心線重合時(shí),受能端定位不動(dòng),通過步進(jìn)電機(jī)控制供能端逐漸上升,縮短兩個(gè)線圈的垂直距離,步進(jìn)電機(jī)每移動(dòng)一次,檢測(cè)一次通過受能端的磁通量,經(jīng)過前后兩次磁通量對(duì)比來確定最終有效充電距離范圍[9]。
實(shí)際充電中,以插補(bǔ)耦合技術(shù)控制驅(qū)動(dòng)電機(jī),通過檢測(cè)移動(dòng)過程前后的磁通量來控制供能端定位于有效充電距離內(nèi)。圖3為利用插補(bǔ)技術(shù)控制電機(jī)自動(dòng)循跡路徑過程中磁通量檢測(cè)和控制原理。
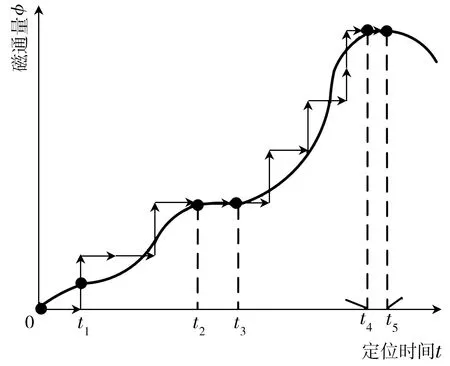
圖3 利用插補(bǔ)偶合技術(shù)的磁感線反饋跟蹤定位過程Fig.3 Tracking and positioning process of magnetic induction line feedback using interpolation coupling technology
2.3 智能控制單元
電動(dòng)汽車無線充電傳輸?shù)碾娔芴攸c(diǎn)是高電壓、大電流,因此應(yīng)選取具有耐高壓和大電流特性的電子器件來構(gòu)成智能控制器內(nèi)部控制電路即控制單元。以嵌入式模塊作為控制單元,選取灌電流500 mA、關(guān)態(tài)電壓50 V的達(dá)林頓陣列為核心控制單元,選取UM 2003芯片及外圍電路來控制電機(jī)的驅(qū)動(dòng)和繼電器的開關(guān),主電路如圖4。
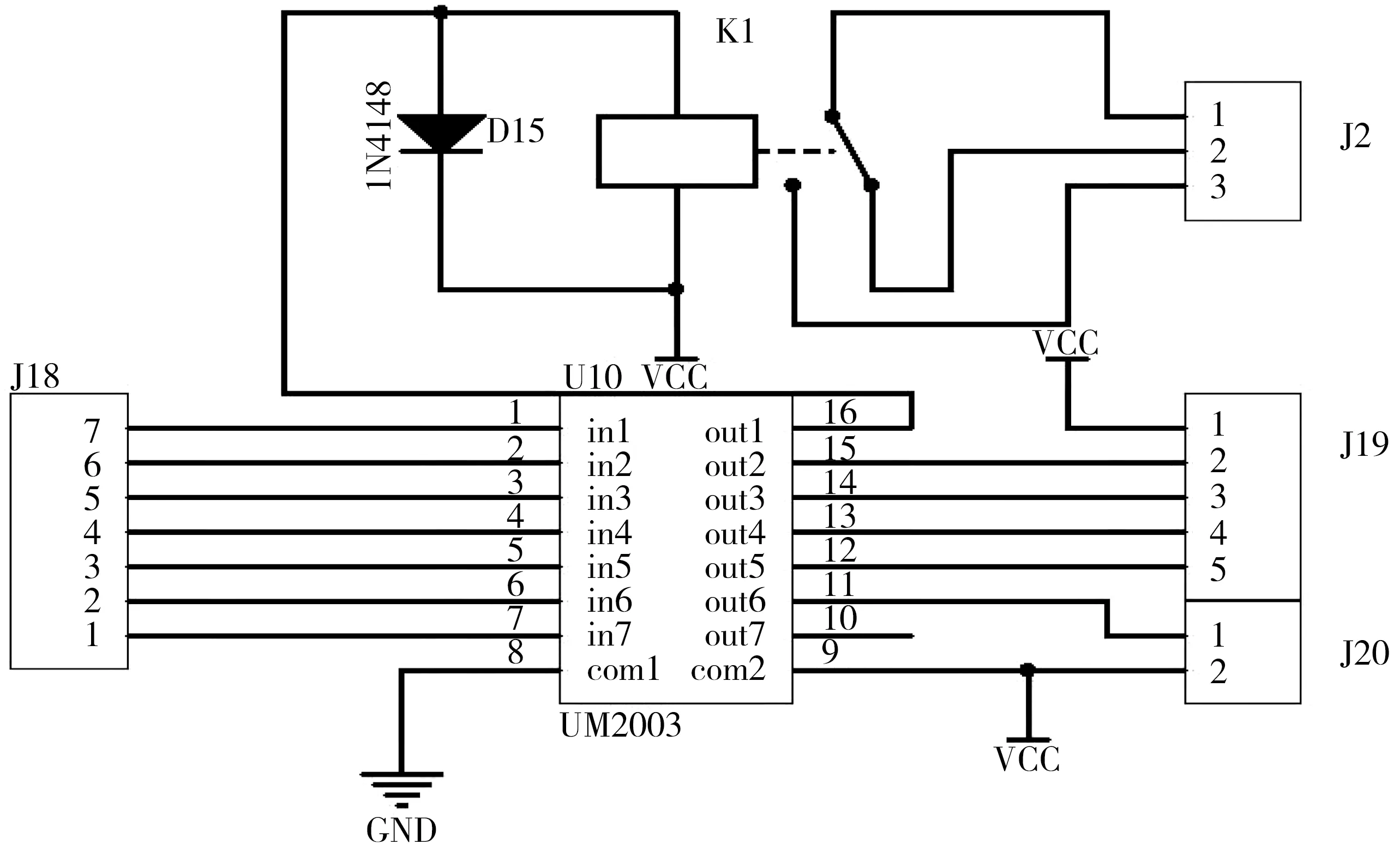
圖4 智能控制器內(nèi)部電路Fig.4 Internal circuit of intelligent controller
控制原理是通過輸入信號(hào)和反饋信號(hào)的對(duì)比,輸出高電平信號(hào),驅(qū)動(dòng)步進(jìn)電機(jī)控制供能端移動(dòng),在水平面移動(dòng)使發(fā)射端線圈產(chǎn)生的磁通量穿過受能端線圈,在垂直方向移動(dòng),使收發(fā)端的線圈距離達(dá)到有效充電距離[10]。
2.4 快充過程中充電電流的控制
動(dòng)力電池作為電動(dòng)汽車能量源,其壽命直接影響續(xù)航里程,而充電中電流越變是影響動(dòng)力電池使用壽命的重要因素之一。因此,合理設(shè)計(jì)充電過程電流的大小可延長(zhǎng)電池使用壽命[11]。在充電過程中,開始階段采用浮充電方式可以快速使電池達(dá)到額定電壓和電流,減少充電對(duì)電池的影響;待電池的輸出電流大小達(dá)到額定值后,采用恒流、多次恒壓的方式充電,使電流長(zhǎng)時(shí)間在小范圍內(nèi)波動(dòng),直至電池滿載。忽略電池自身放電影響(電流微弱下降),當(dāng)電池放電電流達(dá)到額定電流的20%時(shí),開始浮充充電;考慮電池壽命,電池充電電流變化不可越變,故各階段電流大小的控制盡量保持平滑變化。不同階段下充電電流大小控制如圖5。
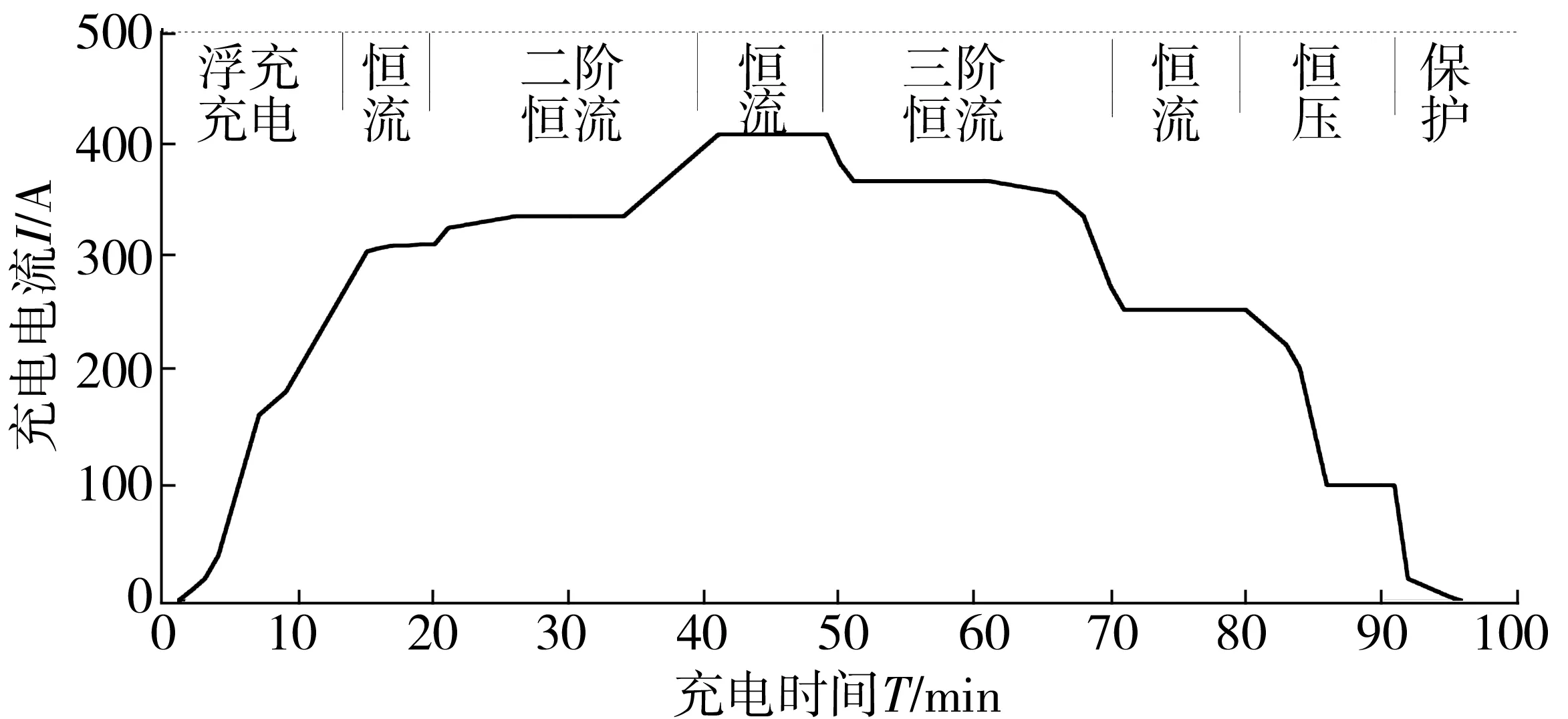
圖5 充電電流控制過程Fig.5 Control process of charging current
3 無線充電中最佳參數(shù)的選取
在無線充電過程中,充電電能取決于供電線圈所提供的能量值。影響無線充電能量傳輸?shù)囊蛩刂饕杏行С潆娋嚯xD和線圈半徑R。無線充電中磁感線可以表征磁通量大小,反應(yīng)能量傳輸?shù)亩嗌伲菦Q定充電效率的關(guān)鍵因素[12-13],而線圈大小又是決定磁感線多少的關(guān)鍵因素之一。為此,筆者通過對(duì)比穿過線圈磁通量的多少和磁感強(qiáng)度的大小來確定有效充電距離D和線圈半徑R。首先,根據(jù)畢奧-薩伐爾定律計(jì)算磁通量φ與R的關(guān)系;然后,利用該定律變形公式計(jì)算R和D的關(guān)系;最后,通過計(jì)算機(jī)仿真實(shí)驗(yàn)驗(yàn)證理論參數(shù)值的優(yōu)越性,通過對(duì)比分析選取最佳參數(shù)值。
3.1 磁通量與有效充電距離
根據(jù)畢奧-薩伐爾定律,由式(1)求出電流環(huán)產(chǎn)生的磁感線和磁場(chǎng)分布:
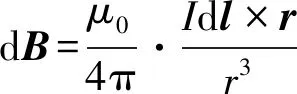
(1)
式中:dB為磁感線;μ0為真空磁導(dǎo)率,μ0=4π×10-7T·m/A;I為充電電流,A;r為電流元到P點(diǎn)的矢徑,cm;dl為導(dǎo)線元的長(zhǎng)度矢量,cm。
3.2 不同有效充電距離下充電線圈的設(shè)計(jì)
根據(jù)畢奧-薩伐爾定律的變形公式可知,磁感應(yīng)強(qiáng)度B與線圈半徑R和有效充電距離D的關(guān)系如式(2):
(2)
為對(duì)比不同參數(shù)對(duì)磁通量的影響,每一類參數(shù)從最小值增加,計(jì)算不同參數(shù)的磁通量理論數(shù)值。環(huán)電流I=100 A,環(huán)分N=30段,分別計(jì)算在有效充電距離D=10、15 cm時(shí),線圈半徑R=30、40、50、60、70、80 cm對(duì)應(yīng)的磁通量φ,結(jié)果如表2。由表2可知,當(dāng)D=10 cm、R=40 cm,或D=15 cm、R=60 cm時(shí),磁通量φ最大。
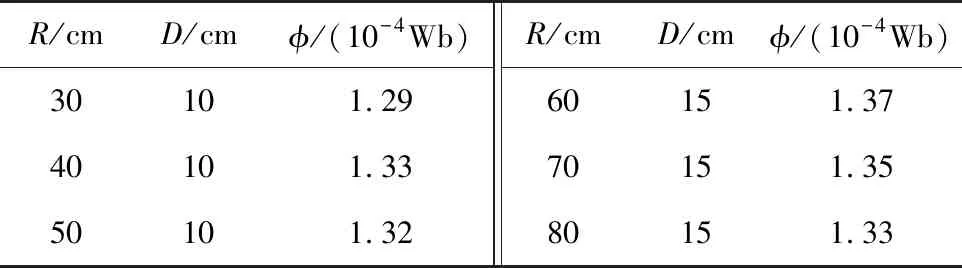
表2 不同有效充電距離D和線圈半徑R下的磁通量φTable 2 Magnetic flux φ under different effective charging distance D &coil radius R
3.3 仿真驗(yàn)證
采用MATLAB軟件,通過迭代仿真模擬實(shí)驗(yàn)對(duì)比有效充電距離D=10、15 cm下,不同線圈半徑R的磁通量φ分布和磁感應(yīng)強(qiáng)度B大小。
按照表2中數(shù)據(jù),在D=10 cm時(shí),驗(yàn)證R=30、40、50 cm的磁通量φ和磁感應(yīng)強(qiáng)度B大小;當(dāng)D=15 cm時(shí),驗(yàn)證R=60、70、80 cm的磁通量φ和磁感應(yīng)強(qiáng)度B大小。磁感應(yīng)強(qiáng)度B分布如圖6(a)~(f),磁通量φ分布以磁感線表示,如圖6(g)~(l)。
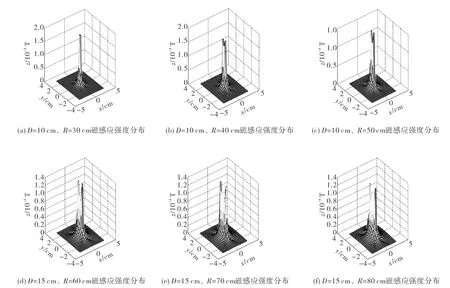
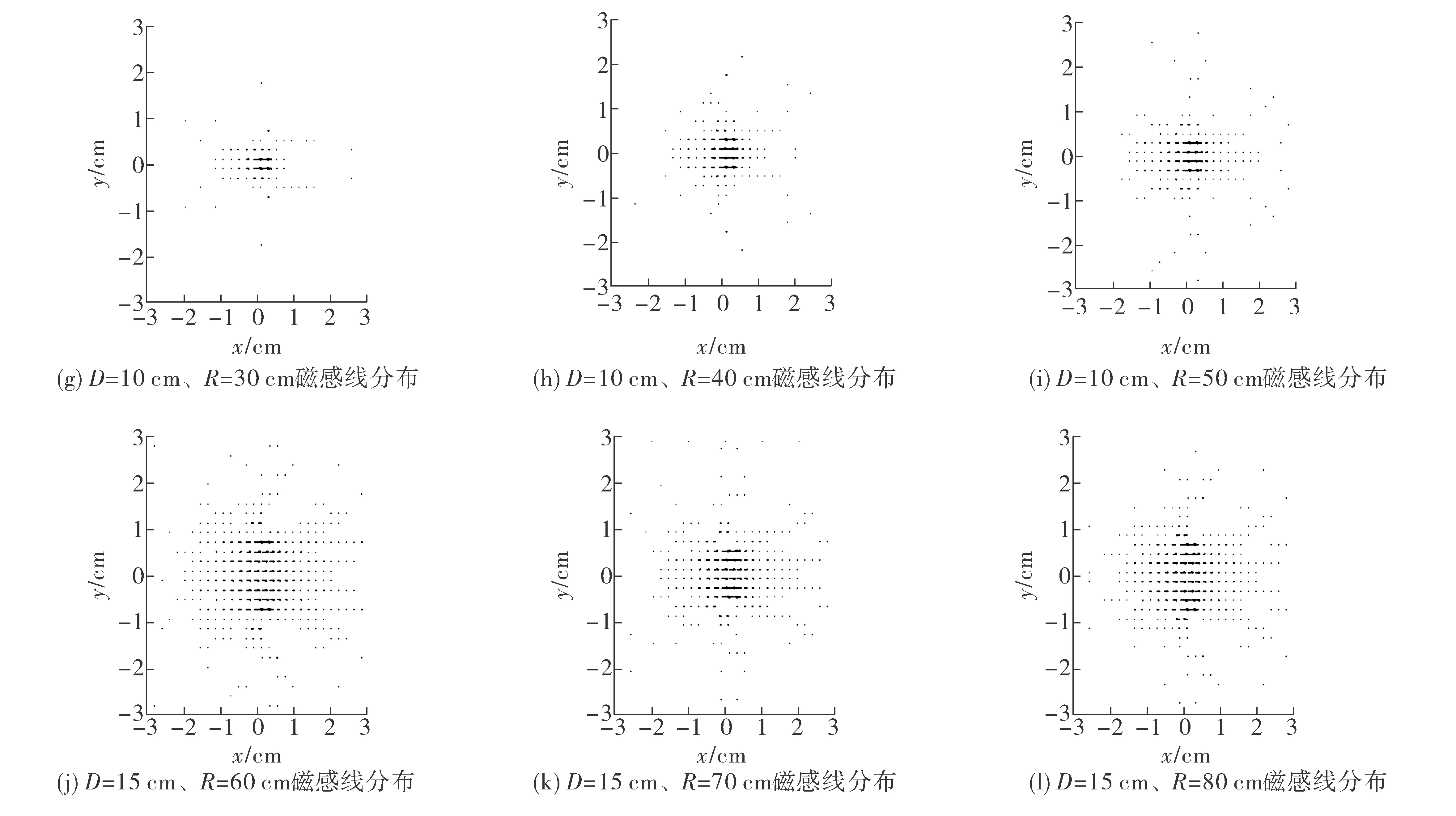
圖6 有效充電距離D下線圈半徑R與磁場(chǎng)的關(guān)系Fig.6 Relationship between coil radius R and magnetic field under effective charging distance D
由圖6可知,當(dāng)D固定時(shí),磁感應(yīng)強(qiáng)度與磁感線密度隨著R的增大而增大:R=40 cm時(shí),磁感應(yīng)強(qiáng)度B增大了1倍,磁感線密度增大不足1倍;當(dāng)R=60 cm時(shí),磁感應(yīng)強(qiáng)度B增大1倍,磁感線密度增大大于1倍。
研究發(fā)現(xiàn),隨著R的不斷增大,磁感線僅表現(xiàn)為線圈中某處的磁通密度增加,磁力線總數(shù)基本不變。結(jié)果驗(yàn)證了理論參數(shù)值的準(zhǔn)確性。在實(shí)際應(yīng)用中,考慮到硬件設(shè)備的承受強(qiáng)度和靈活性,建議取R=40 cm,D=10 cm。
4 結(jié) 語
筆者設(shè)計(jì)了一種基于插補(bǔ)技術(shù)的無線自適應(yīng)充電裝置,以插補(bǔ)耦合技術(shù)控制步進(jìn)電機(jī)在空間水平方向和垂直方向的移動(dòng)量,實(shí)現(xiàn)收發(fā)端的精準(zhǔn)定位;并以傳輸最大磁場(chǎng)能量為控制目標(biāo)調(diào)節(jié)輸入信號(hào),確保供電端與受能端的充電線圈達(dá)到最佳的有效充電距離;對(duì)充電過程充電電流進(jìn)行平滑控制,消除浮充電對(duì)電池的影響。利用畢奧-薩伐爾定律及變形公式計(jì)算充電距離和線圈半徑的理論數(shù)值;通過仿真實(shí)驗(yàn)驗(yàn)證了在不同有效充電距離下,充電線圈半徑R和磁通量φ、磁感強(qiáng)度B之間的對(duì)應(yīng)關(guān)系,再對(duì)比不同參數(shù)輸入時(shí)的磁場(chǎng)強(qiáng)度,確定傳輸最大磁場(chǎng)強(qiáng)度下所對(duì)應(yīng)的充電線圈半徑。最后,推薦最佳充電裝置設(shè)計(jì)方案參數(shù)為有效充電距離D=10 cm、線圈半徑R=40 cm。
基于插補(bǔ)技術(shù)的無線自適應(yīng)充電方法具有充電快速,充電電流穩(wěn)定和充電能量傳輸效率高等特點(diǎn),解決了電動(dòng)汽車固定點(diǎn)位充電的難題。
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時(shí)刊(2020年13期)2020-09-25 08:21:42
奧秘(創(chuàng)新大賽)(2020年1期)2020-05-22 02:42:38
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
小學(xué)科學(xué)(學(xué)生版)(2019年10期)2019-11-16 08:55:02
小哥白尼(趣味科學(xué))(2019年12期)2019-06-15 10:56:32
通信電源技術(shù)(2018年3期)2018-06-26 06:34:18
人大建設(shè)(2018年2期)2018-04-18 12:17:00
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42