電動輪椅車的智能導航及避障研究
2021-06-24 11:32:32吳宏雷孟青云肖軼
現代儀器與醫療 2021年3期
吳宏雷 孟青云,2* 肖軼
(1.上海健康醫學院醫療器械學院,上海 201318;2.上海穿戴式醫療技術與器械工程研究中心,上海 201318)
2006年,第二次全國殘疾人抽樣調查數據顯示,我國殘障群體總人數為8296萬人(占到了我國當時人口總數的6.34%左右),這個數字比1987年的占比高1.44%。而且其中肢體殘疾的總人數約2412萬人,占殘疾人總數的29.07%[1]。為了改善和提高殘疾人的生活質量,使他們能夠像正常人一樣自由移動來更好地融入社會,輪椅已經成為他們不可或缺的輔助工具。
最初的輪椅是依靠護理人員的推動或使用者手動轉輪進行移動。隨著技術的發展,越來越多的電驅動輪椅進入行動能力欠缺人群的生活。但由于目前輪椅的使用者多為自我保護能力不足的老年人和殘疾人,因此在輪椅的移動過程中不能對路徑上存在的障礙物進行很好的避障或做出相應的避障策略而導致輪椅通過障礙物時發生抖動或傾斜,易對使用者造成傷害,而且市面上輪椅需要使用者持續操作,對于不能自主活動的老人或殘疾人無法使用輪椅準確地到達目的地。為此,對智能輪椅的導航系統及避障系統進行分析,設計一種可用于家庭、社區和康養醫院等場合的智能導航及避障的電動輪椅車。
1 導航系統
導航的方式有多種,根據環境信息的完整程度、導航指標信號類型、導航地域等因素的不同,主要有以下三種:循跡傳感器導航系統、機器人操作系統(robot operating system,ROS)導航系統、路徑記憶導航系統。
1.1 循跡傳感器導航系統
1.1.1 循跡傳感器的原理
循跡傳感器的原理利用了黑、白色對紅外線吸收作用的不同[2]。循跡原理如圖1所示,左側為紅外光發射管,通電后能產生肉眼不可見的紅外光,右側部分是紅外光接收管,它的電阻會隨著接收到紅外光的多少而發生變化。由于黑色能夠吸收光線,當紅外發射管發出的紅外光線照射在黑色表面后被反射回來的部分較少,紅外接收管接收到的紅外線也就較少,表現為電阻較大,通過外接的電路可以讀出檢測的狀態,同理當照射在白色表面時反射回來的紅外線較多,表現為紅外接收管的電阻較小。這樣就可以通過接收端電平變化來判斷輪椅是否偏離預設的路線。
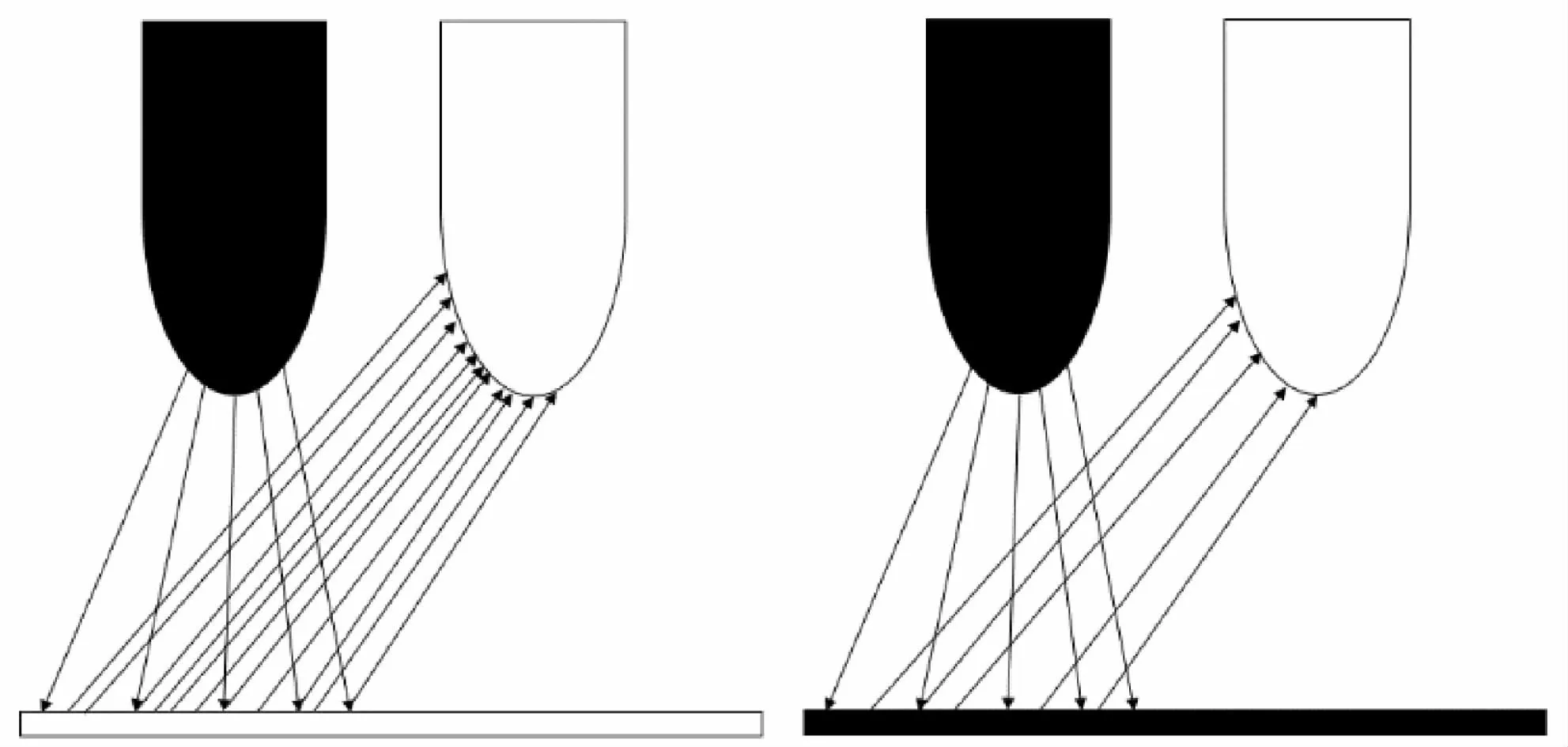
圖1 紅外循跡原理圖
1.1.2 循跡傳感器的導航實現
通過紅外循跡原理,在輪椅底部安裝探測距離可調、精度更高的二路循跡模塊。每路具體硬件電路圖如圖2所示,電位器R2用來調節靈敏度,將紅外接收管接收到的電壓信號通過LM393比較器與預設電壓信號進行比較,當其大于預設信號時會輸出高電平,反之則輸出低電平[3]。
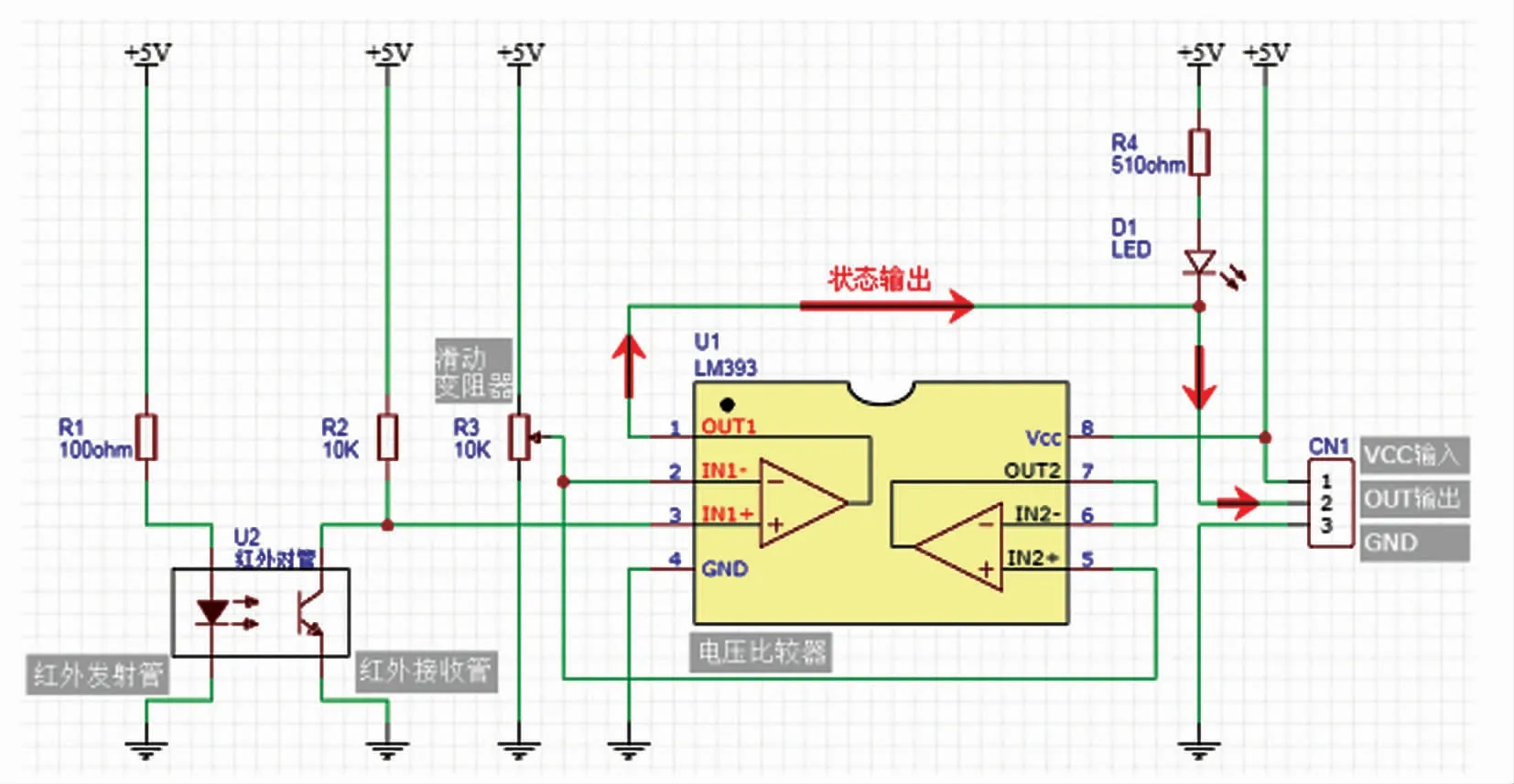
圖2 循跡傳感器原理圖
只要事先在使用場所地面上規劃好黑色的路徑線,用控制器判斷紅外循跡傳感器左右兩路輸出端電平的高低,就能夠判斷輪椅運行在黑色的路徑線上方的具體位置,根據檢測狀態的不同通過控制器調整轉向使輪椅一直沿著黑色的路徑線行駛,從而實現智能輪椅的循跡導航功能。這種導航方式的實現較為簡單且成本不高。
1.2 ROS導航系統
1.2.1 ROS導航系統的原理
ROS是一個服務于機器人的操作系統,提供了能應用于不同機器人的各種功能包[4]。從基本控制器、模型建立到自主導航功能等,包含了用于構建機器人控制系統的絕大多數可復用軟件包。ROS由許多進程與主機在對等的拓撲關系下連接。只要配置適當,該模塊就可以應用到其他機器人上。當然,用戶也可以將自己的某些軟件與之集成,實現新的功能。
ROS的核心功能是提供一種軟件點對點通信機制,基于這個機制,開發人員可以非常靈活和高效地組織機器人的軟件系統。“節點”、“消息”、“主題”和“服務”是ROS的4個基本概念。不同研究者對輪椅功能的要求不同,但卻有著許多共性的問題,比如易用性、開發效率、跨平臺、多編程語言、分布式部署、代碼可重用等。如何解決這些共性問題,ROS領先了其他平臺。ROS提供類似操作系統所提供的功能,包含硬件抽象描述、底層驅動程序管理、共用功能的執行、程序間的消息傳遞、程序發行包管理以及一些用于獲取、建立、編寫和運行多機整合程序的工具程序和軟件庫。
1.2.2 ROS導航系統的應用
導航系統分為兩部分,底層控制由嵌入式電腦組成,它為電機驅動和傳感器提供接口[5]。上層控制由一個通過網絡連接的server/client程序組成。上層導航系統基于ROS導航和差動控制功能包。通信節點則用于封裝客戶端程序、訂閱傳感器信息和發布控制命令。
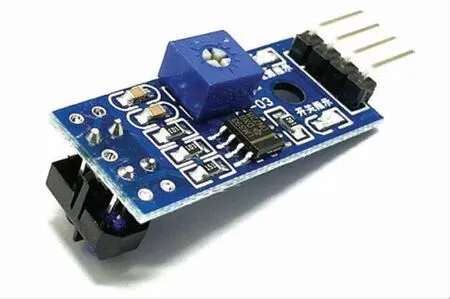
圖3 循跡傳感器實物圖
首先,在生成地圖時,功能包通過通信節點接收傳感器數據,一旦傳感器消息和轉換消息發布完成,就可生成導航需要的地圖,可觀察到整個地圖創建的過程。導航則與建圖的過程相反,當map文件啟動,包含在功能包中的路徑規劃節點和運動控制節點可以利用消息和位姿消息規劃運動路徑。最后,當PID速度控制節點接收到消息后便可完成運動控制。輪椅走過的位置會不斷更新,并在地圖中留下軌跡。這樣的結構具有較強的生命力,當研究者的領域在導航算法時,無需再將精力投入到電機控制、通信或者仿真,只需直接編寫導航功能包,配置相關文件即可。也可以在此基礎上加入更多諸如腦電信號控制、輪椅助殘機械臂等內容,大大提高了科學研究的效率,ROS的通用性得到了極好的體現。
1.3 路徑記憶導航系統
1.3.1 路徑記憶導航系統意義
當殘障人士或老年人乘坐智能輪椅外出,若發生意外,則需要智能輪椅具備一定的記憶功能,將來時的路徑記錄下來,然后根據存儲的路徑數據,實現原路返回[6]。一般情況下,對于所有經過的路徑進行存儲,為智能輪椅原路返回提供保障,而沒有被記錄的路徑均被假設為不可行路徑。
1.3.2 路徑記憶導航模塊原理
在路徑記憶的模式下,智能輪椅系統需隨時記錄當前位置,即所謂的自定位。智能輪椅系統的自定位主要依靠安裝在兩個驅動輪上的碼盤,每隔一段時間,通過對碼盤返回的數據進行處理,就可得到智能輪椅兩個主動輪分別走過的距離,進而可以得到輪椅相對于起始點的位移和轉過的角度,從而實現智能輪椅的自定位[7]。
當使用智能輪椅的殘障人士或者老年人遇到一些突發狀況,需要盡快返回起點時,智能輪椅就需要進入路徑重現模式。由于智能輪椅已對走過的路徑有了記錄,對外界環境有了一定的了解,這時要返回起點,可能存在多條路徑,需要智能輪椅能夠在多條可達的路徑中選擇出一條最佳路徑,該智能輪椅系統中要求距離最短的路徑。
2 避障系統
避障系統中最重要的部分是障礙物檢測技術功能,障礙物檢測技術是智能輪椅安全行駛的關鍵性技術。當安裝在智能輪椅上的傳感器檢測到環境中有障礙物存在時,智能輪椅的決策模塊根據觀測到的信息,規劃出一條能夠避開障礙物的線路,保證輪椅安全行駛而不與障礙物發生碰撞。目前,障礙物檢測的方法較多,現就比較常用的幾種技術進行比較。
2.1 超聲波傳感器避障系統
2.1.1 超聲波測距的原理
在智能避障輪椅行進過程中,超聲波傳感器發射端向空氣中發射超聲波。超聲波在沒有遇到障礙物時不會被反射,因此當傳感器的接收端沒有接收到反射回來的超聲波時,智能避障輪椅會繼續正常地按照原定的路線行駛,一旦超聲波在空氣中傳播的過程中遇到障礙物會被反射回來,由傳感器的接收端接收,輪椅與障礙物之間的距離通過超聲波發射時刻與超聲波接收時刻的時間間隔來計算得到[8]。
超聲波測距的工作原理可簡單表述為由超聲波傳感器的發射端向空氣中發射聲脈沖,檢測到障礙物時由傳感器的接收端接收回波,發射與接收會產生時間差。已知聲速為c[9],需要測得回波由傳感器接收端接收回波的時刻與脈沖發射時刻的時間差t,再通過公式(1):s=(t×c),就可得到傳感器與障礙物之間存在的距離s。如圖4所示超聲波的測距的工作原理圖。
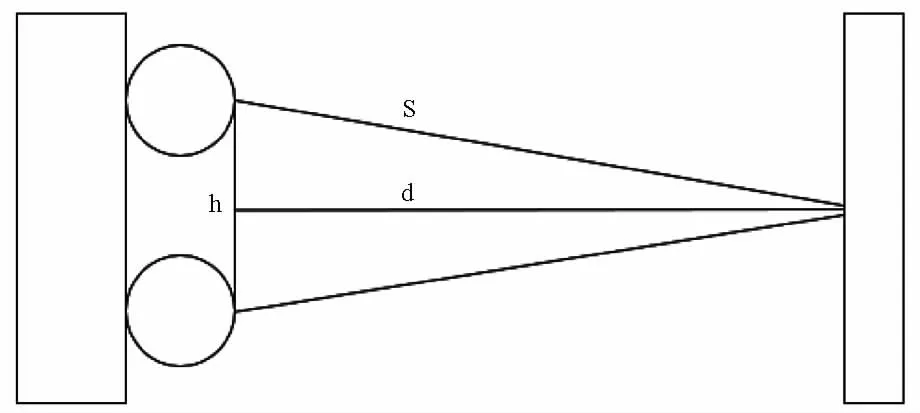
圖4 超聲波測距原理圖
2.1.2 超聲波避障的實現
如圖5所示,超聲波傳感器可以向前方、左右等多個方向發射超聲波[10],通過超聲波傳感器來檢測智能避障輪椅周圍環境中各個方向的障礙物情況,即可獲得較大范圍的環境信息,以便實時對路徑上的障礙物做出合理的避障。
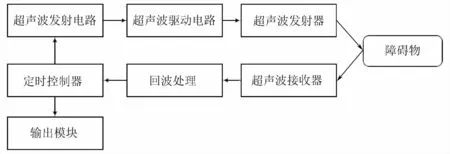
圖5 超聲波避障工作流程圖
2.2 視覺傳感器避障系統
2.2.1 常用視覺傳感器避障系統方案
常用的計算機視覺方案有多種,比如雙目視覺、基于飛行時間(time of flight,TOF)法的深度相機、基于結構光的深度相機等。深度相機可以同時獲得紅綠藍(red green blue,RGB)圖和深度圖,不管基于TOF還是結構光,因需要主動發光,在室外強光環境下效果都不理想。
像基于結構光的深度相機,發射出的光會生成相對隨機但又固定的斑點圖樣,這些光斑照在物體上,因為與攝像頭距離不同,被攝像頭捕捉到的位置也不相同,之后先計算拍到的圖的斑點與標定的標準圖案在不同位置的偏移,利用攝像頭位置、傳感器大小等參數就可以計算出物體與攝像頭的距離。
2.2.2 雙目視覺測距原理
雙目立體視覺的基本原理是使兩個攝像頭處于不同視角,同時拍攝同一目標場景,通過攝像頭的成像原理獲取兩個二維平面圖像,并計算空間點映射到左右圖像像素上的坐標偏差,由此得到三維場景的空間信息[11]。與結構光方法不同的是,結構光計算的點是主動發出的、已知確定的,而雙目算法計算的點一般是利用算法抓取到的圖像特征,如尺度不變特征變換(scale-invariant feature transform,SIFT)或加速穩健特征(speeded up robust features,SURF)等,這樣通過特征計算出來的是稀疏圖。
要做良好的避障,稀疏圖還不夠,需要獲得的整個場景深度信息的稠密的點云圖。稠密匹配算法分為局部算法和全局算法。局部算法使用像素局部的信息來計算其深度,而全局算法采用圖像中的全部信息進行計算。一般來說,局部算法的速度更快,但全局算法的精度更高。這兩類各有多種不同方式的具體算法實現,通過它們的輸出估算整個場景的深度信息,該深度信息可以幫助尋找地圖場景中的可行走區域以及障礙物。整個輸出類似于激光雷達輸出的3D點云圖,與激光雷達相比,得到信息更豐富,但測量精度差一些,對計算能力的要求也較高。
2.3 紅外傳感器避障系統
2.3.1 紅外傳感器避障系統的原理
紅外避障主要是以紅外測距傳感器為主。紅外測距均采用三角測距的原理。紅外發射器按照一定角度發射紅外光束,在遇到物體之后,光反射回來,檢測到反射光之后,通過結構上的幾何三角關系,就可計算出物體和障礙物的距離。當障礙物和輪椅的距離很大時,測量精度變差。因此,常見的紅外傳感器測量距離都比較近,小于超聲波,同時遠距離測量也有最小距離的限制。另外,對于透明的或者近似黑體的物體,紅外傳感器是無法檢測距離的。
2.3.2 紅外傳感器模塊電路圖及參數
該傳感器模塊對環境光線適應能力強,其具有一對紅外線發射與接收管,發射管發射出一定頻率的紅外線,當檢測方向遇到障礙物(反射面)時,紅外線反射回來被接收管接收,經過比較器電路處理之后,信號輸出接口輸出數字信號(一個低電平信號),可通過電位器旋鈕調節檢測距離,有效距離范圍2~30cm,工作電壓為3.3~5V。該傳感器的探測距離可以通過電位器調節、具有干擾小、便于裝配、使用方便等特點。
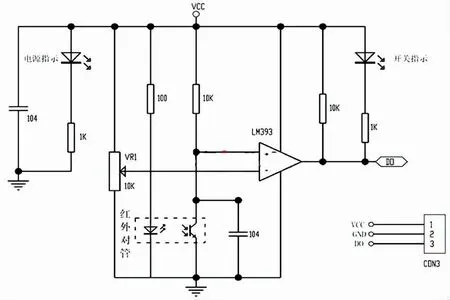
圖6 紅外傳感器電路圖
3 一種電動輪椅車的智能導航及避障實現
對于實現一種電動輪椅車的智能導航及避障主要是在原有電動輪椅的基礎上開發新功能,所以對于電動輪椅的機械設計及原有硬件不作詳細講述。接下來關于硬件的設計和選用的內容主要是主控制器芯片的選用和導航及避障模塊的硬件設計,控制系統設計主要是對于智能導航和避障系統的流程圖講解。
3.1 硬件設計
3.1.1 主控制芯片的選用
該設計中主控制器芯片的選擇主要考慮以下幾點要求。首先,主控制器需要具備定時器的作用,因為智能輪椅中的車輪旋轉速度都需要經過脈沖寬度調制(pulse width modulation,PWM)進行調節,而且超聲波傳感器還需要定時器的作用才能達到避障。其次,該芯片須包含A/D轉換的功能,因為循跡傳感器輸出的信號都需要轉換成一種數字信號。根據以上要求,選用STM32芯片,該芯片不僅帶有A/D轉換器和定時器的功能,外接口也非常的多,可以拓展更多的功能模塊,價格也相對較低,非常適合對此循跡避障智能輪椅功能的控制[12]。
3.1.2 循跡傳感器
在該智能輪椅前方底部安裝兩個紅外循跡傳感器,用于檢測輪椅的位置信息,輸出端連接至STM32芯片,接收端的電平變化使輪椅沿著黑色的路徑線行駛,也能利用電平的變化使偏離路徑線的小車回到黑色的路徑線上,如下表1所示。
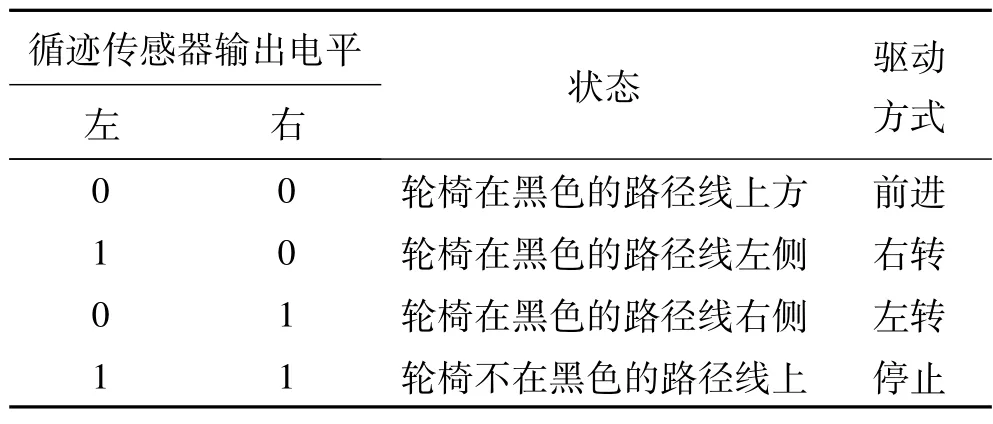
表1 循跡控制邏輯表
3.1.3 超聲波傳感器
在電動輪椅的前方安裝多個HC-SRO4超聲波傳感器,通過上文超聲波傳感器的原理對前方一定方向范圍內的障礙物進行探測。超聲波頻率超過了20000赫茲,它的穿透性和方向性都較高[13],在超聲波傳感器測得智能避障輪椅與障礙物之間的距離后,由控制模塊與系統原設的安全距離作比較,從而控制驅動電機進而控制智能輪椅的運動。
3.2 程序系統設計
3.2.1 系統主程序設計
首先要對系統的各個部分和各個模塊進行初始化:包括時鐘、定時器以及各個IO口等。接下來進行串口數據接收并讀取數據來確定運行程序的模式:手動模式或循跡避障自動模式。確認模式正確后執行相應模式下的程序,輸出相應指令的PWM控制小車的速度。如果系統運行正常就循環以上程序,如果系統運行不正常輪椅則停下。系統主程序的流程如圖7所示。
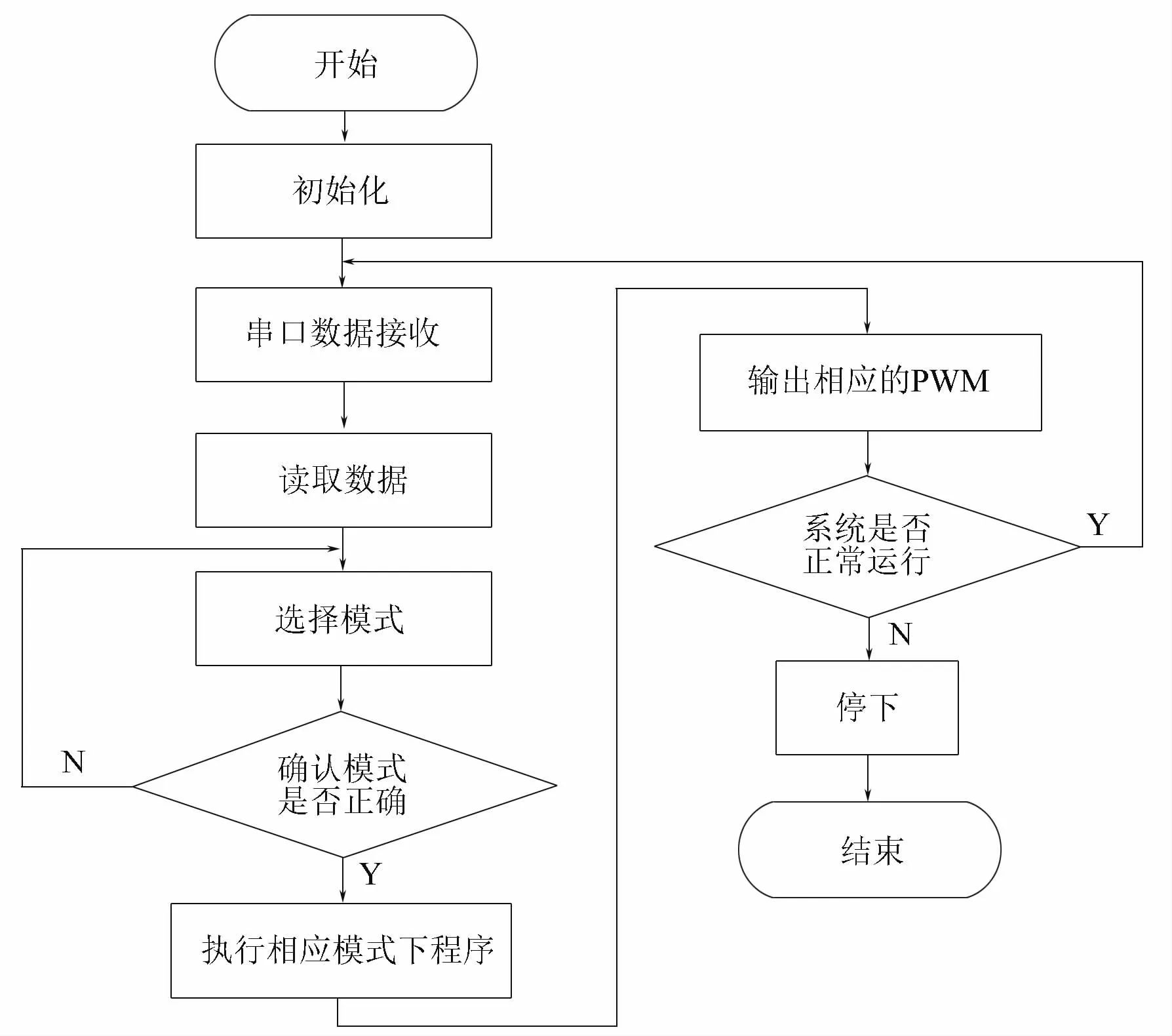
圖7 系統主程序的流程圖
3.2.2 循跡避障程序設計
輪椅的循跡避障功能通過將循跡功能程序和避障功能程序結合實現。循跡功能的作用是使輪椅循線行駛,避障功能的作用是在循跡行駛的時候探測障礙物并且及時避障。
循跡避障功能程序啟動后,系統初始化,接著運行循跡功能程序,輪椅沿著事先在使用場所地面上規劃好的黑色路徑線行駛,在行駛的同時運行避障程序。避障程序可以在循跡程序運行行駛時持續探測前方安全距離內是否存在障礙物,如果超聲波傳感器發出的超聲波探測到出現在系統設定的安全距離內的障礙物,輪椅會馬上停下,然后持續探測前方障礙物的狀態,直到障礙物移開或是超出了設定的安全距離,輪椅就會繼續運行循跡功能程序行駛。這樣就能實現在循跡行駛過程中及時躲避障礙物的功能,循跡避障功能程序總流程圖如圖8所示。
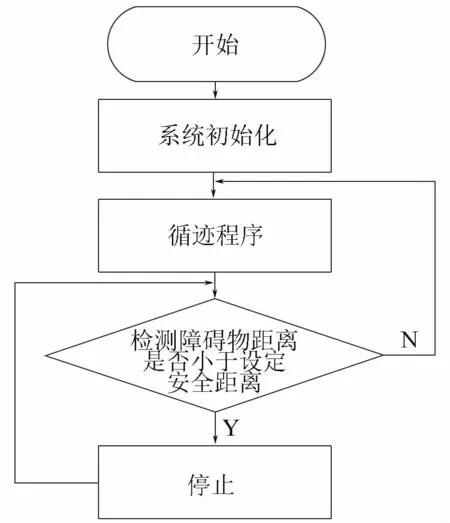
圖8 循跡避障功能程序總流程圖
4 討論
2021年5月11日國家統計局公布的第七次全國人口普查數據顯示:60歲及以上人口占18.70%(其中65歲及以上人口占13.50%)且呈上升趨勢[14]。目前,越來越多的國家對老年人和殘疾人的生活質量十分關注。美國醫療基礎設施提供了4000億美元[15],目標是研發照顧老年人和殘疾人的設施或系統;我國的“十四五規劃”也對老年人和殘疾人的康復輔具智能化和設施的建設十分重視。近幾年來,隨著科技水平飛速發展,越來越多的先進技術被用于提高殘障群體的生活質量。對于殘疾人和部分老年人來說,智能輪椅存在的意義在于可以使他們正常進行日常活動,并以此種方式使他們的行為自由度獲得提升。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20