基于無人機的新型海水采集系統設計與實現
2021-06-24 06:29:38劉玉良陶良明劉宏升毛俊仁許明樂劉金椅
海洋技術學報 2021年2期
關鍵詞:設計
劉玉良,陶良明,董 平,劉宏升,毛俊仁,許明樂,劉金椅
(1. 浙江海洋大學 信息工程學院,浙江 舟山 316022;2. 浙江省舟山中學 科技創新中心,浙江 舟山 316001;3. 溫州理工學院 設計藝術學院,浙江 溫州 325035;4. 舟山商文機器人科技有限公司,浙江 舟山 316106)
近年來,隨著工業污染及生活垃圾排放、海洋漁業養殖規模過度增加,近海海域水污染問題日益嚴重,海水溫度、溶解氧、pH值等參數不斷偏離正常范圍[1],給養殖業等造成了巨額損失,因此需要對海水進行實時采集、檢測和治理。目前海水采集以人工為主,一般為乘小船到現場采集,需要的人力物力較多,而且采集海水時覆蓋面積小、效率低,部分水域還面臨風大浪急、乘船觸礁擱淺等危險[2]。目前,我國只有少部分海域啟動了海水自動檢測模式,即把海水采樣監測設備固定在漁場的特定地點,一定程度上體現了自動化特點[3],但是仍存在采樣覆蓋范圍小、采集地點變動不靈活等缺陷。用無人機參與海水采集能夠充分發揮其便捷、靈活、高效等優勢[4],為解決上述問題提供了新思路。無人機在陸上環境監測、農業、林業等領域已得到成功應用,積累了不少經驗,為無人機在海水采集領域的應用研究提供了重要借鑒[5]。根據文獻報道,一些地方已經嘗試研制基于無人機的海水采集設備,但大多數是在無人機上掛載水瓶、水桶等簡陋設備,密封性不好,很容易使海水樣品在轉移過程遭受二次污染,從而導致海水化驗結果不準[6];另外,現有的設備使用了舵機、連桿、彈簧、閥門、水泵等,機械結構復雜,體形笨重[7-8],運動不靈活,可靠性也不高。基于此背景,本文研制了新型海水采集裝置,依托無人機升降及控制裝置完成海水采集任務,重點解決近海海域海水采集的準確性、靈活性等關鍵問題,旨在提高我國近海海域海水檢測自動化水平。
1 海水采集系統的總體方案設計
本文設計的海水采集系統適用于近海海域,包括上位機和下位機,即無人機平臺和海水采集裝置,總體方案如圖1所示。圖1中無人機平臺包括單片機、無人機本體及飛行控制器、電動絞盤、步進電機、獨立電源等,設置獨立電源是為了確保控制系統穩定;海水采集裝置包括單片機、海水采集管、雙頭采集針、推桿電機、防水設備等,總體方案如圖2所示。海水采集裝置細分為海水采集管、雙頭采集針、控制器及通信設備等;海水采集管內部初始狀態是真空或負壓;雙頭采集針是由軟膠管相連的內針頭和外針頭;外針頭固定在采集裝置外部下方,內針頭固定在采集裝置內部且初始位置跟采集管的密封橡皮圈對準。海水采集裝置的內針頭刺入采集管時,由于負壓原理海水將從外針頭沿著軟膠管進入采集管;當內針頭從橡皮圈拔出時,海水采集管將與外界自動隔離而停止采集海水,滿足海水采集的密封性要求。
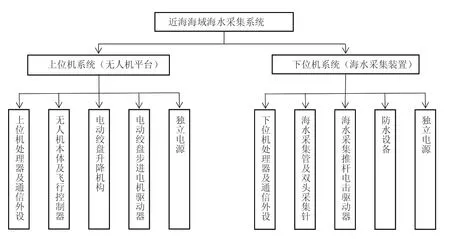
圖1 海水采集系統的總體結構
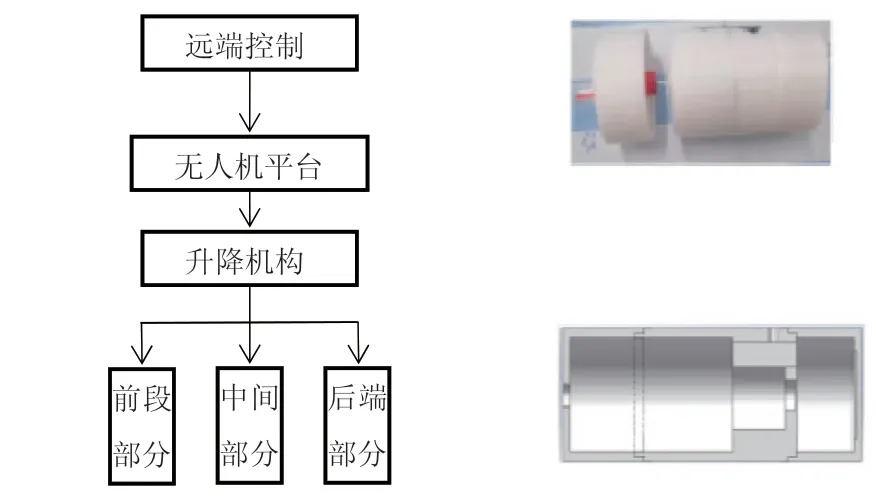
圖2 海水采集裝置的結構、外觀和截面圖
海水采集系統工作時,無人機平臺完成海水采集裝置的輸送與升降,而海水采集裝置完成海水采集的啟動與停止。設計要求是無人機平臺能夠在目標海域上方懸停,接到命令后將海水采集裝置下降到海面,等待海水采集任務結束后,把采集裝置提升并固定在無人機平臺上,然后攜帶海水采集裝置飛回到陸上的海水化驗中心。海水采集裝置收到由上位機下達的海水采集命令后,通過推桿電機推動針頭前移,扎破負壓采集針管的頂封橡皮圈而吸入海水。本文采集海水的動作命令由傳感器觸發,采集量達到要求后,傳感器觸發下位機發出結束采集的命令請求,然后由上位機反饋信號以控制推桿電機反轉,將采集針頭從采集針管的橡皮圈拔出,從而停止采集海水并使采集管自動密封。
2 機械結構設計
2. 1 海水采集裝置的機械設計
本文的海水采集裝置設計借鑒醫學注射器的負壓抽取原理,分為前端、中部和尾端3部分。工作時前端朝下,尾端朝上。前端由前蓋和采集管構成(圖3),在前蓋上預留一個小孔,目的是使雙頭采集針外針頭正好穿過前端而向下伸入海水。后端包括后蓋和電池(圖4),后蓋底端的凹槽為固定11.5 V鋰離子電池的位置,推桿電機及電池導線等均放于后蓋。
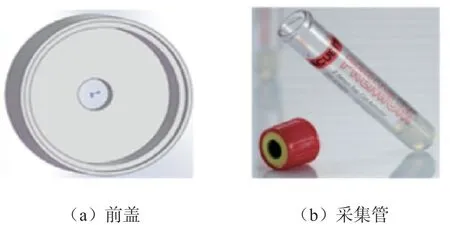
圖3 前端結構
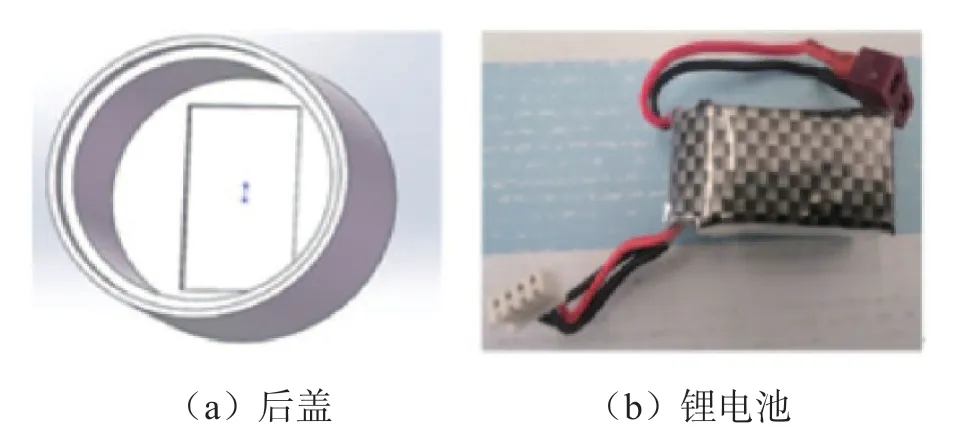
圖4 后端結構
海水采集裝置的中間部分為核心部分,如圖5所示,具體包括中蓋、圓柱體夾具、推桿電機等。中蓋上小孔跟前蓋配合,為采集針刺穿采集管提供通道;中蓋上預留的凹槽是為嵌入推桿電機預留的位置。本文的推桿電機相電阻為7.5 Ω,相電流0.5 A,工作電壓12 V。安裝時,先將雙頭采集針的內針頭固定在推桿電機轉軸上,再將推桿電機放入中蓋的凹槽,最后將雙頭采集針的外針頭從中蓋的小孔穿出,伸到前端,便于由其前蓋的小孔伸入海水。
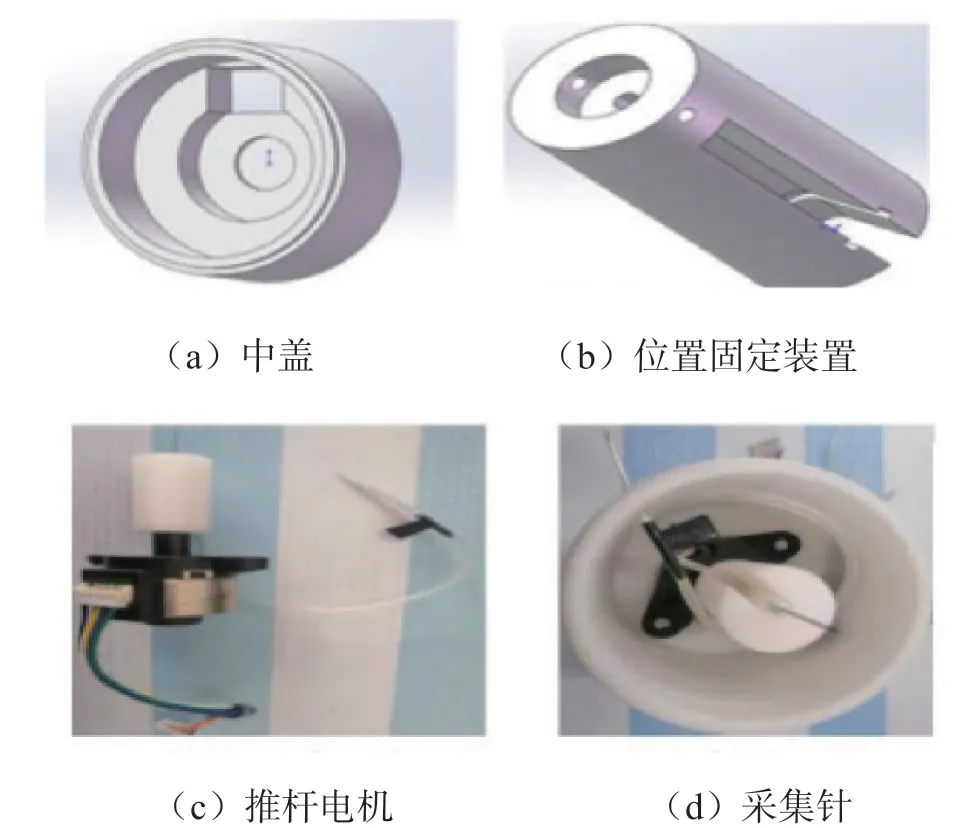
圖5 中間部分的結構
2.2 電動絞盤的機械設計
絞盤作為升降控制系統的核心組件,其原理是通過轉動借助繩索使物體位置提升或降低,按照動力方式可分為液壓絞盤、氣動絞盤、電動絞盤等。本文由于升降力不大,同時考慮到安裝及控制的簡便化要求,選用了電動絞盤,其盤座、連接件等采用3D設計和打印,如圖6所示。
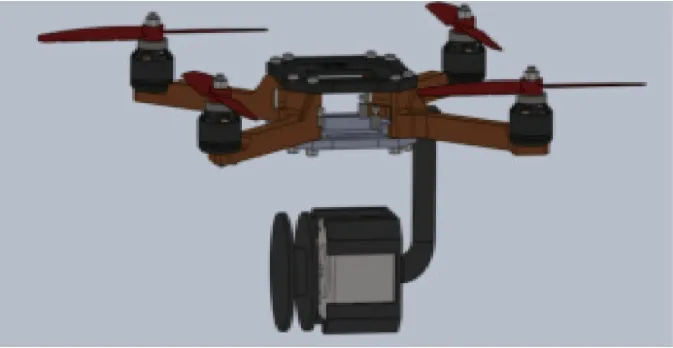
圖6 無人機與電動絞盤連接示意圖
3 控制系統設計
本文的控制任務包括無人機飛行控制、海水采集裝置升降控制、海水采集啟停控制等。其中,無人機飛行控制借用了無人機平臺的自帶功能,具體工作是無人機通信協議的研究與編程實現;而海水采集裝置升降控制和海水采集啟停控制,本文以單片機arduino promini為硬件核心,應用TB6612電機驅動模塊,分別控制無人機上電動絞盤的步進電機和海水采集裝置的推桿電機。本文的遙控終端應用樂迪AT9S型號航模遙控器,由它發出電動絞盤升降控制和海水采集啟停控制的原始指令。原始指令通過無人機平臺的開放通道進行通信,上位機和下位機之間通過zigbee無線串口模塊通信。為便于軟件升級、安裝調試,本文控制系統采用了模塊化設計思路,如圖7所示。
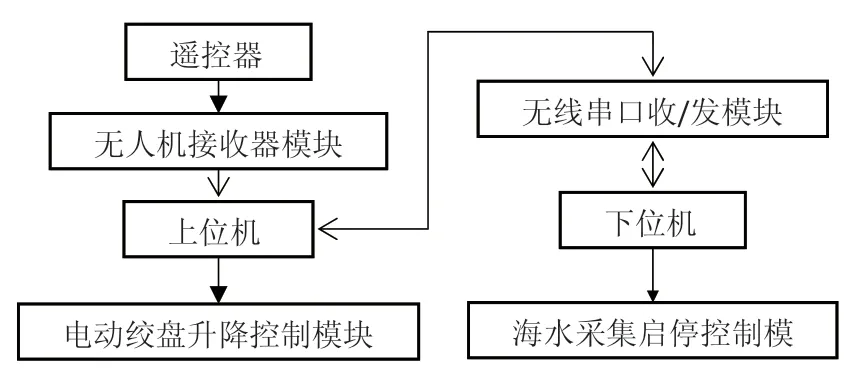
圖7 升降控制和采集控制原理圖
3.1 控制方案簡述
無人機控制的特點是:要求電機啟動、停止、升降、轉向等能夠快速響應,而且要求電機體積小、力矩大、質量輕、抗干擾能力強、輸出穩定等。本文權衡后選用步進電機,理由是盡力避免電機停轉時吊起的裝置滑落,另一理由是步進電機響應僅由數字輸入脈沖確定,支持開環控制,電機結構簡單且控制成本低。本文采用了兩個步進電機,一個是固定在無人機上的4相5線制電機,用來控制絞盤轉動即控制升降;另一個是微型2相4線制推桿電機,通過推桿的直線運動控制海水采集的啟與停。
3.2 控制軟件設計
本文的控制器Ardunio Pro Mini單片機只有單個串口,給通信和燒錄切換帶來不便,因此使用Software Serial庫模擬串口通信。為提供編程效率,使用Arduino的內置步進電機控制庫函數step( ),編程時僅需配置引腳和脈沖頻率。無人機遙控器上還有可用的舵機接口,本文通過此接口給無人機發送信號,實現電動絞盤步進電機的正反轉控制。電機控制基于脈寬調制PWM原理,無人機上舵機引腳與單片機I/O口相連,讀取I/O口一個舵機基準信號周期的高電平占比,再判定高電平占比從而控制電機工作。本文的通信主機為無人機平臺,其作用為讀取遙控器發射的舵機信號,控制絞盤電機收放絞盤和發射狀態碼給下位機,下位機的作用是接受主機發送的狀態碼,控制海水采集裝置的推桿電機,完成海水采集的控制。軟件流程如圖8所示。
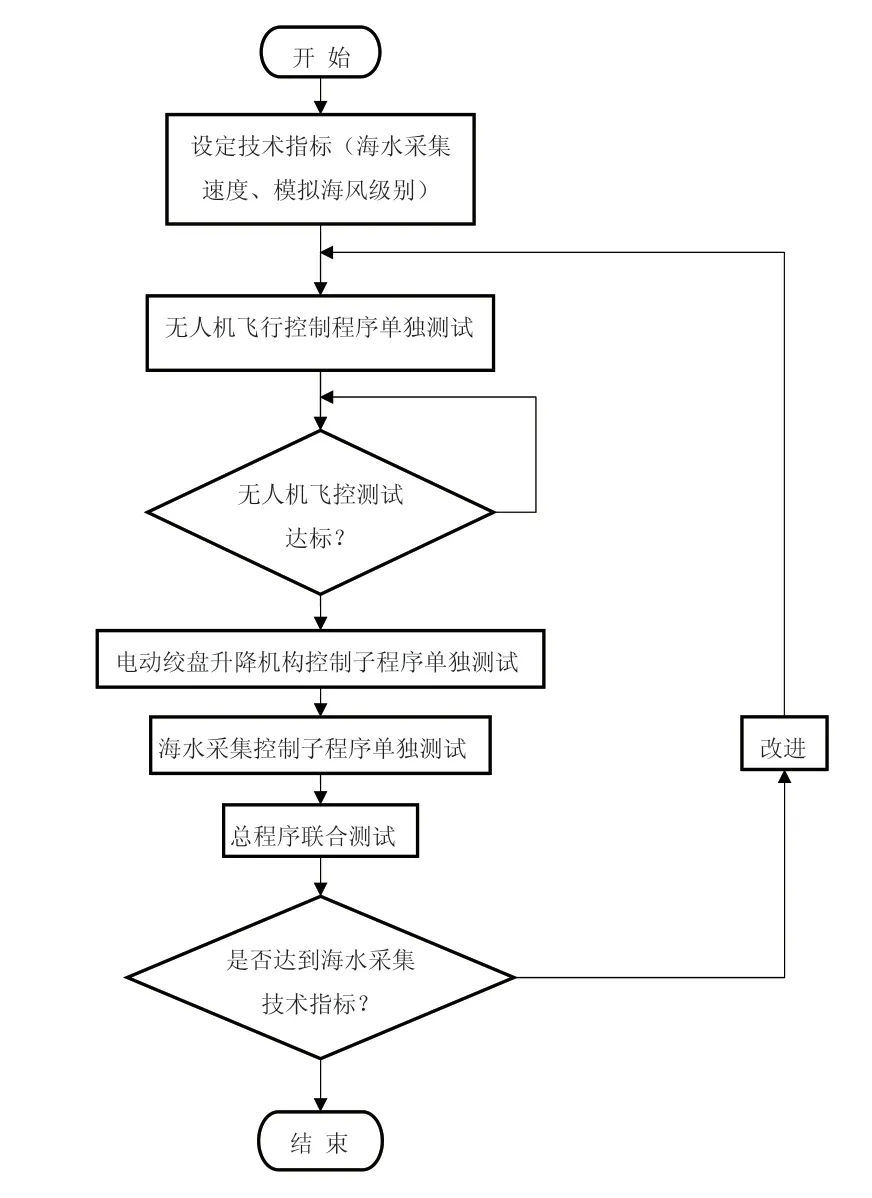
圖8 海水采集系統的軟件流程圖
4 海水采集實驗
海水采集實驗系統組裝起來后,上位機尺寸尺度大約400 mm × 400 mm × 440 mm,重量1.654 kg;下位機尺度約為200 mm × 200 mm × 300 mm,重量0.654 kg;功耗為1 500 mAh;無人機型號為S500四軸無人機pixhawk。實驗時間天氣條件均為陰天和多云,東南風或西南風5級以下,海浪高度0.1 m以下。課題組完成上位機和下位機的模塊化設計之后,應用KeyShot軟件進行了計算機仿真,如圖9(a)所示。計算機仿真通過后,在浙江海洋大學智能機器人研究所進行了模塊制作、組裝,如圖9(b)所示。然后進行室內調試和浙江海洋大學校園內的調試,最后在舟山長峙島附近海域進行了現場測試和改進后的再次測試。在測試過程中,利用控制器面板上設有的遙控和自控切換按鈕,支持遙控和自控操作,保證安全性和便利性。同時采用緊湊型四旋翼無人機平臺,保證體積小、成本低的優點,便于后續推廣。測試結果表明,采集過程無人機能夠穩定飛行和懸停在海域上空,扣除無人機往返飛行等裝備時間,采集5 mL海水平均用時15 s。借助無人機平臺,能夠穩定地實現海水采集設備的下吊、提升以及采集后海水采集設備在無人機上位置的固定;系統的續航能力為滿載飛行時間10 min和遙控工作范圍1.1 km。
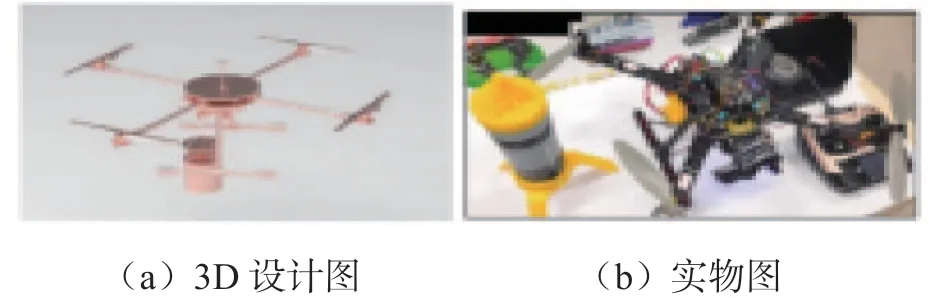
圖9 海水采集實驗裝置
5 結 論
本文提出了基于無人機的新型海水采集方案,完成了上位機和下位機的設計、集成與測試,其中上位機控制支持遙控和自控兩種方式。本文重點完成了海水采集設備的設計,該設備基于負壓原理,保證海水采集的密封性即海水檢測的準確性要求。最終改進后的系統在舟山海域單個采集點進行了5次測試,均取得了成功。目前存在的主要問題是無人機續航時間不夠長、飛行抗風性不夠強等問題,因此課題組將繼續改進海水采集裝置,以提高海面風浪增加后的工作適應性。目前由于設備尺寸及配重所限,只適應于浪高0.1 m以下的微浪,能夠在大浪環境下穩定采集海水的第二代樣機,將是下一步的研究任務。課題組還將更換大容量采集針管,并嘗試在多個采集點進行測試,研究采集點位置切換時系統的工作穩定性和靈活性,以及引進機器視覺和智能控制算法[9-10],以進一步提高海水采集系統的自動化程度。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04