全海深原位測試裝置控制系統設計
2021-06-24 06:30:20解則曉遲書凱張凱彬
海洋技術學報 2021年2期
解則曉,于 平,遲書凱,張凱彬,葉 旋,韓 濤,賈 威
(中國海洋大學 工程學院,山東 青島 266061)
海底沉積物是一種粉質黏土,對海底沉積物力學特性原位測試裝置的控制精度提出了更高要求,且全海深沉積物原位測試與取樣成本高、風險高[1],對全海深沉積物的研究工作將帶來巨大困難。近年來,海洋開發領域由近海向遠海、由淺海向深海不斷推進。海洋水深范圍在6 000~11 000 m的海域,被科學家稱為“海斗深淵”,是地球上最深的海洋區域,海斗深淵是地球上人類迄今為止探索極少且又難以涉足主要地區之一[2-4]。目前,全海深領域的研究主要集中在美國、英國、日本等少數發達國家。提高深海原位測試工作效率、深海設備工作能力對我國經濟、國防和科研的發展和進步有著至關重要的作用。截至2015年底,達到萬米級水下無人探測裝置僅有美國的Nereus HROV(“海神”號)和日本的Kaiko ROV(“海溝”號)[5],并且兩個探測裝置均在探索任務進行中丟失,可見萬米以下深海復雜環境對水下探測裝置的可靠性要求之高。為提高我國海洋科學實力,加快完善深淵科學領域,研制萬米級海底原位測試裝置的控制系統勢在必行[6]。
海平面下,隨著深度不斷增加,溫度降低、壓力升高。對海底進行科學研究采用原位測試獲得的數據將更能反映深海的實際環境,原位測試可以實地在線測量,獲取在海底復雜環境下的測量數據及樣品。由于深海環境存在復雜性和不確定性,使用無人水下探測裝置進行深淵原位探測就成為了一種節約資源、方便安全的探測方式[7-8]。探測裝置核心控制系統在整個裝置的下降、作業、回收過程中起決定性作用。萬米級水下的壓力對于實驗裝置的抗壓能力提出了非常高的要求,能夠達到萬米級的水下耐壓艙體積較小,在完成水下作業任務所需攜帶裝置數量較多的情況下,對整個裝置進行設備分艙裝配將提高裝置的安全性和可靠性,裝置分艙安置各個子系對于控制系統供電及通信可靠性設計將提出更高要求[9]。體積小的耐壓艙所攜帶的供電設備體積也相對較小,對系統功耗提出了更高的要求。萬米水深多選用無纜的布放方式,水上水下通信選用的水聲通信技術尚不成熟,在整個工作過程中可能出現水聲失聯和數據丟包的情況,因此要求控制系統有一定的自主工作能力。同時對于深海復雜環境及裝置環境,需要進行實時感知,為自主工作模式提供數據支持。然而,目前的深海測試裝置在工作時對于不同的測試需要設計不同控制系統,這無疑會造成人力及財力的浪費。因此,尋求一種具備高可靠性供電、通信、感知、存儲的全海深控制系統,對提高深海原位測試工作的效率極為重要。
本文從海底沉積物力學特性原位測試裝置課題控制系統研發需求出發,研究設計了一種高可靠性控制系統[10],可以在全海深環境下完成原位測試工作,搭載不同種類傳感器便于獲得整個作業過程環境及外部數據,控制多路土力學探桿降低成本,提高工作效率,具有功耗低、可靠性高、體積小、易于維護、應用范圍廣泛等特點。
1 控制系統設計
本文設計的全海深原位測試裝置控制系統是整個裝置的控制中心,整個裝置由為貫入系統傳輸動作指令的電機驅動艙、水上水下通信傳輸命令的水聲通信艙、水下數據采集整合的采集儀艙以及整個裝置的控制核心總控制艙構成。本文設計的裝置下潛至萬米級海底,進行土力學原位測試并完成實時數據采集工作。控制系統需對整個作業過程進行控制操作及狀態檢測,并對水下環境數據實時上傳至上位機。系統搭載水聲通信機、采集儀、貫入系統控制驅動以及裝置進入海平面后完成所有狀態檢測工作所需的狀態傳感器。
裝置從入水至最終完成作業任務后浮出水面總共需要經歷甲板準備、下降、近底、坐底、上浮、浮出水面等不同階段,每個階段需要控制系統對整個裝置進行不同的控制。由于全海深環境的復雜性和特殊性,可達萬米水深的密封艙容量小,要求承載控制系統的電路板及供電設備體積小,因此采用高性能低功耗32位ARM作為系統主處理器,高集成嵌入式系統將簡化系統結構、降低系統功耗、提高系統可靠性。控制系統作為裝置“大腦”,連接的外部設備、傳感器種類和數量較多,需要多種不同類型接口驅動。在設計上采用FPGA芯片,利用其硬件可編程特點實現靈活的外部接口擴展;利用其硬件可重構特點靈活應對深海環境復雜性及外部系統設計變更,使控制系統易于維護;利用其高速并行邏輯處理能力完成系統電源保護電路的設計以提高系統可靠性。
控制系統ARM處理器搭載溫度、氣壓、壓力、高度計、方位姿態等傳感器獲取裝置運行的外部及內部狀態信息,搭載土力學采集儀對海底原位測試數據進行解析與處理[11]。水面上位機通過水聲通信機實現水下與水上控制命令的傳輸與信息交互。控制系統FPGA對貫入系統電機、拋載電機和控制探桿啟停的四路電磁閥分別進行控制[12]。控制系統艙內設置獨立供電模塊,為控制系統及部分外接系統提供供電[13]。控制系統方案設計如圖1所示。
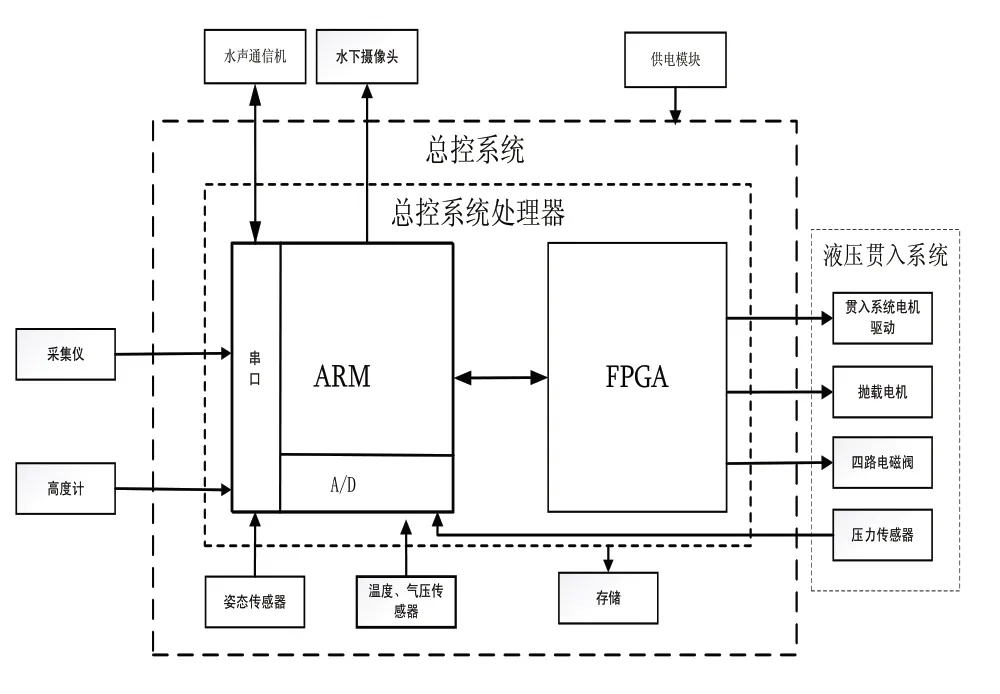
圖1 控制系統方案設計
1.1 供電設計
采用安置在艙內的24 V鋰電池及板載穩壓模塊對系統進行供電,對于不支持寬壓輸入設備采用經過穩壓模塊的24 V穩壓供電,減少變壓損耗,提高電源效率[14]。24 V電壓進入控制系統為整個控制系統內部、深海環境感知的攝像機、深海高度計、方位姿態傳感器、溫度氣壓傳感器等及原位測試裝置其他密封艙內子系統提供供電及控制。由于控制系統內部及外設子系統供電要求不同,控制系統電源控制模塊采用TPS54541與LTC3621芯片對鋰電池輸入的供電進行兩次降電平處理,將24 V電壓降為12 V, 5 V, 3.3 V,分別為控制系統內部各個模塊及外接系統提供供電。控制系統供電設計如圖2所示。
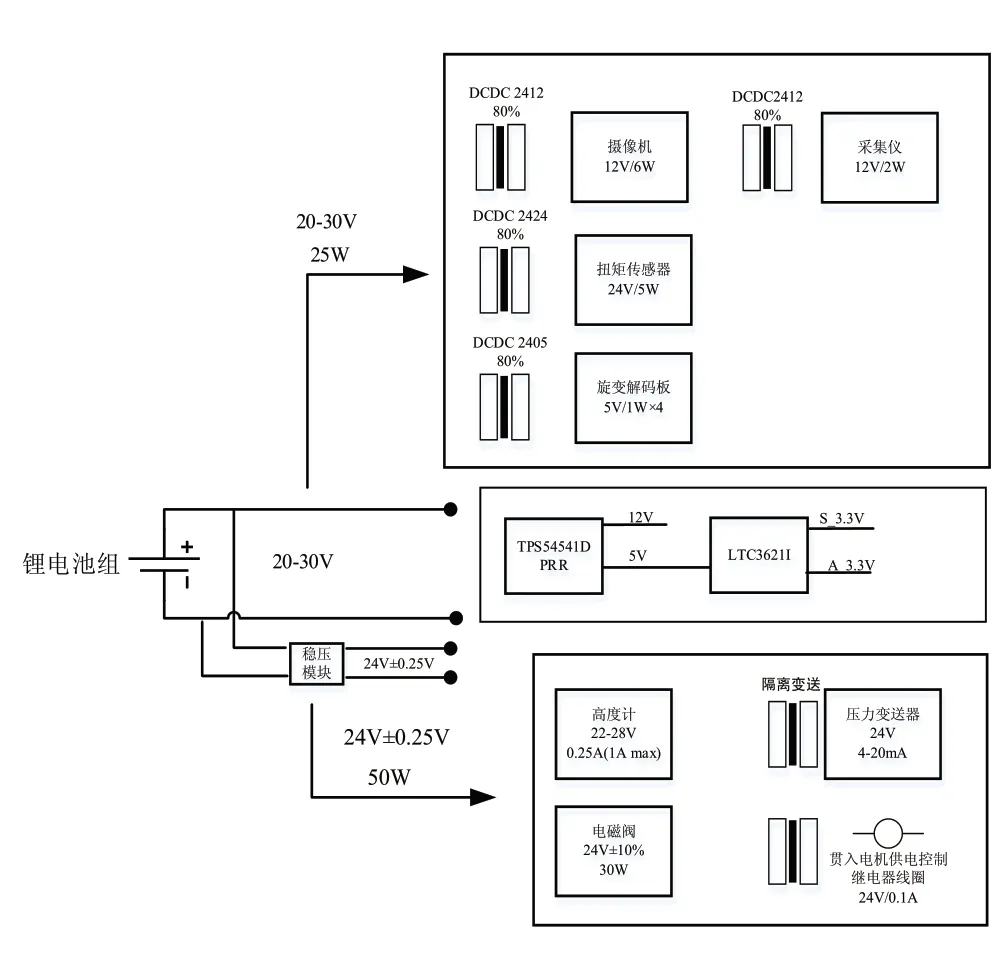
圖2 控制系統供電設計
控制艙內所帶供電鋰電池體積較小,裝置從入水至浮出水面整個工作時長對系統供電提出更高功耗可控的設計要求。系統供電設計采用模塊化的設計方式并且在每個供電模塊中加入可控開關,按照功能分塊后,系統在裝置不同運行狀態時對不同功能模塊控制供電,保證系統功耗可控。裝置抵達海底后進行原位測試,控制系統通過控制供電的方式有選擇性為四路電磁閥供電,電磁閥上電吸合后對應一路探桿貫入方向向下,控制系統以此方式控制整個原位測試過程順利進行[15]。
原位測試裝置采用分艙安置子系統的設計,在全海深極端背景下,這一設計要求控制系統為部分外部系統供電時要有更高的可靠性,且要確保控制系統電源不受外部系統故障及其他密封艙漏水短路等對總控艙造成的影響。
控制系統對外接系統供電時,部分外接子系統設備和外接傳感器功耗較低,控制系統直接采用DC/DC隔離模塊保護供電[16],隔離輸出控制供電電路如圖3 所示。高度計、電磁閥等運行功耗高或瞬時電流較大的外部設備采取FPGA高速邏輯中斷保護,控制系統設計實時監測電壓、電流電路,將檢測到的信號發送至A/D模塊經處理后傳送至FPGA中,保證控制系統實時掌握系統各部分電路電流電壓值,一旦發生過流、過壓,將立即控制斷電。高速邏輯中斷保護電路如圖4所示。

圖4 高速邏輯中斷保護電路
1.2 通信設計
原位測試裝置整體體積較小,密封艙之間間距較近,控制艙外接設備種類較多。控制系統在裝置整個工作過程需完成對其他艙內設備的控制任務,與系統內部進行參數信息交互及控制命令的發送。系統設計短距離、應用廣泛的RS-232串口通信方式。控制系統通過RS-232與外部系統:土力學采集儀、貫入系統電機驅動等進行控制命令發送、接收控制系統的漏水傳感器、方位姿態傳感器、深海高度計回傳的裝置外部及內部狀態信息。
控制系統通過水聲通信機與水面上位機進行數據傳輸,水面上位機可以對水下控制系統進行實時控制,從而實現水上水下的信息交互。控制系統在整個水下作業完成后對拋載電機發出啟動控制命令拋去負載裝置上浮至水面完成回收工作。系統同時設計外接RS485、CAN總線等外接擴展板可滿足多種子系統通信方式[17]。
控制系統與外部所有子系統和傳感器的通信均采用隔離傳輸保護,隔離各子系統間的信號干擾,保障控制系統不受外部設備故障影響。分別采用隔離串口、隔離變送的方式實現了對信號的物理隔離和可靠傳輸,保障系統與外部系統的通信和傳感信號可靠傳輸,提高系統可靠性[18]。隔離串口、隔離變送電路設計如圖5和圖6所示。

圖5 隔離串口電路設計圖
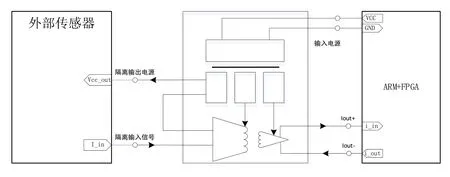
圖6 二線制隔離變送電路設計圖
1.3 感知設計
控制系統分別對全海深環境狀態、原位測試裝置狀態、主控艙艙內狀態、總控板狀態分別進行感知設計。針對環境狀態感知系統設計水下攝像機及壓力傳感器,裝置入水后控制系統可以階段性控制外接攝像機采集深海的環境圖像數據并將圖像信息保存于內置SD卡中。隨著下潛深度增加壓力升高,子系統中壓力傳感器將采集的壓力數據值返回至ARM,經ARM中A/D處理后獲得裝置下落大致深度。
針對裝置狀態控制系統采用KONGSBERG MARITIME(挪威康斯伯格海事)生產的深海高度計獲取裝置離底高度,高度計的有效測量范圍為0.8~300 m,控制系統將通過高度計回傳的數值判斷裝置運行至近底、坐底階段,當高度計回傳數值為0.8 m并且數次不變后,代表裝置已到達海底,控制系統可以控制開始原位測試作業任務。裝置整個下落過程除依靠重力作用無外加動力控制,控制系統的姿態傳感器將采集裝置入水至回收全過程的三維姿態信息并通過RS232串口發送至ARM中,經處理后通過水聲通信機上傳至上位機[19]。
針對總控艙艙內狀態,控制系統設計的溫度、氣壓傳感器將采集到的溫度及艙內氣壓數據發送至ARM處理器。控制系統設計了漏水比較中斷,一旦艙內出現漏水情況將及時發送信號至ARM處理器,ARM將立即發出拋載信號,防止整個系統癱瘓后裝置無法回收。針對總控板狀態進行設計,系統設計多處電流電壓檢測電路對系統內部的電流、電壓進行采集。控制系統感知設計如圖7所示。

圖7 控制系統感知設計
1.4 數據采集及存儲
裝置在下降、近底、坐底、上浮等階段均將艙內溫度、艙內氣壓、外部壓力、近底高度、環境圖像及土力學采集的數據等信息直接傳送至ARM或通過FPGA傳送至ARM進行處理。多種傳感器的采集信號種類不同,而ARM只能處理0~3.3 V的電壓信號,因此系統設計A/D采集模塊對傳感器回傳信號進行進一步處理。本系統設計了SD卡和CF卡雙介質獨立存儲備份,裝置入水便開始進行實時數據的采集,采集的數據除通過水聲通信機上傳至上位機外,同時直接存入控制系統的SD卡及CF卡中,保證整個作業任務收集的數據完整可靠。
2 控制系統工作模式設計
為應對萬米水聲通信技術可能存在的失聯及丟包的現象,控制系統設計多種工作模式以確保原位測試任務順利完成。控制系統工作過程為上位機下發控制命令給系統中ARM處理器,ARM處理器發出控制命令,控制各個子系統完成作業任務。控制系統工作模式設計如圖8所示。
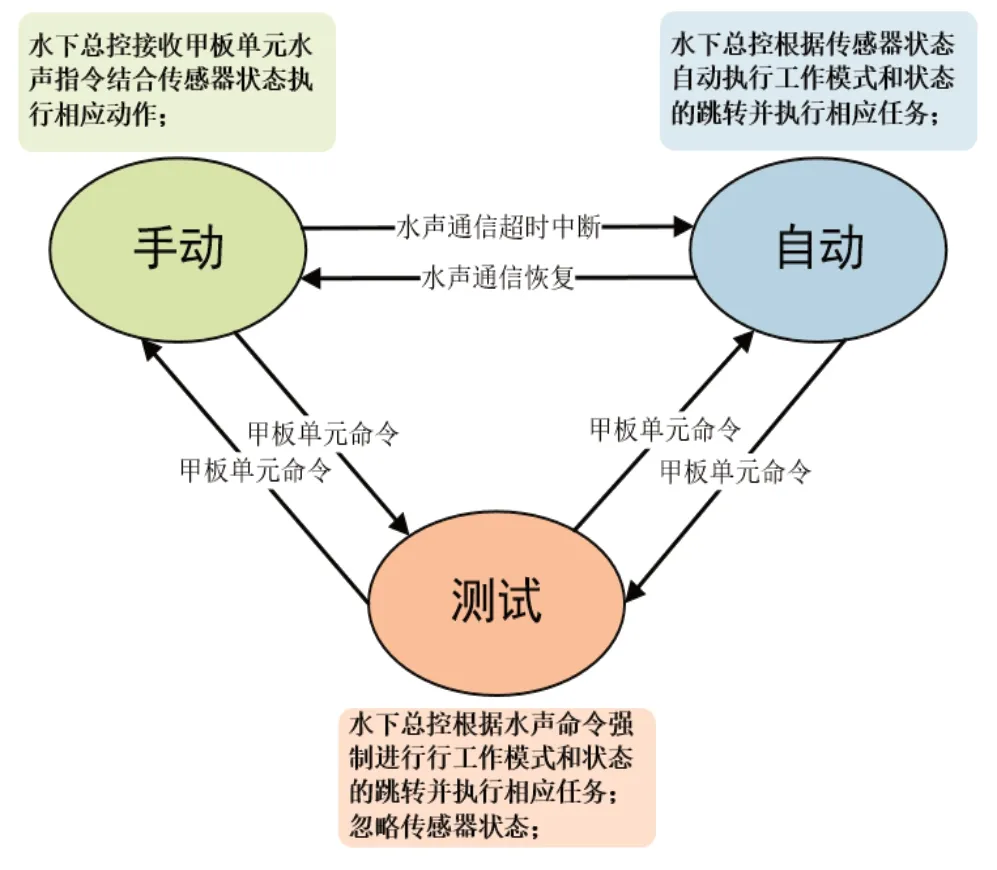
圖8 控制系統工作模式設計
2. 1 手動模式
裝置入水后以手動控制模式為主,控制系統內部程序設計為定時將采集到的傳感器及采集儀數據以數據包的形式通過水聲通信機向水面上位機發送,水面上位機接收到數據包后向控制系統發送數據成功接收指令,控制系統以在一定時間內接收到上位機發送的指令來維持手動模式。手動模式下控制系統由水面甲板操作人員通過上位機顯示的狀態數據對控制系統發送控制指令,控制裝置及外部子系統完成作業任務。
2. 2 自動模式
控制系統超過一定時間接收不到水聲回傳指令將控制模式由手動模式切換至自動模式,當水聲通信恢復后系統將自動切換回手動模式。自動模式下,控制系統根據傳感器回傳狀態數據自動執行工作模式和狀態跳轉并完成水下作業任務。
2. 3 測試模式
控制系統為裝置聯調及水面準備階段設計測試模式,測試模式下,控制系統將忽略水聲通信的超時回傳及傳感器狀態,控制系統通過上位機發出動作指令強制執行動作指令及子系統控制。
3 系統監測設計
為確保原位探測裝置能夠準確、可靠地完成布放及回收,對系統監控的設計至關重要。控制系統將原位探測裝置從裝置入水至作業任務完成后浮出水面設計為甲板準備、下降、近底、坐底、上浮、浮出水面6個工作狀態,每一工作狀態控制系統ARM處理器將包括水下艙外環境狀態、裝置狀態、艙內狀態、總控板狀態等數據的數據包經水聲通信機實時上傳至上位機,以便上位機對海底情況實時監測。
3. 1 控制系統狀態檢測設計
原位探測裝置在控制系統及水聲通信機在甲板單元上電初始化完成后投放,裝置入水后通過上位機下發指令為深海高度計上電,高度計上電后將以秒為單位向控制系統ARM處理器發送裝置離底高度數據。同時控制艙內方位姿態傳感器、溫度氣壓傳感器及艙外的壓力傳感器將實時采集的數據傳送至ARM中,經ARM處理整合成數據包每隔1 min經水聲通信機發送至上位機。
3. 2 水面上位機設計
探測裝置完成一系列作業任務均需上位機與控制系統的信息交互來實現,水面控制軟件是上位機和控制系統的重要實現接口,其主要功能有:監控探測裝置各個子系統的工作狀態,讀取控制系統各傳感器回傳狀態數據并顯示,對水下各個系統發出供電及控制命令,保證作業任務順利完成。
根據探測裝置作業要求及控制系統設計需求,采用北京昆侖通態自動化軟件科技有限公司(MCGS)上位機進行設計,上位機監控及控制界面如圖9所示。
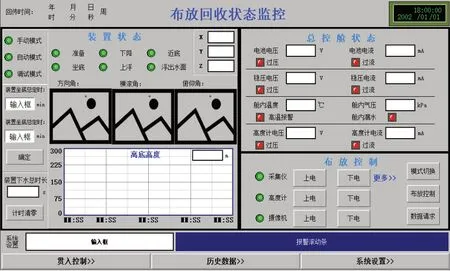
圖9 上位機狀態監控界面
上位機主界面設計總控艙內總控板電流、電壓、溫度、氣壓監測數據,可提供操作員實時查看艙內狀態。左側顯示裝置所處階段,方位姿態傳感器回傳的裝置運行姿態及高度計回傳的裝置離底高度,并顯示控制系統此時所處于的控制模式。右下方為裝置布放控制中采集儀、高度計、攝像機供電控制界面及控制模式切換。裝置坐底后貫入控制界面如圖10所示。

圖10 貫入控制界面
貫入控制界面設計分為貫入狀態監控及貫入控制。貫入狀態有探桿貫入行程監測,包括貫入深度,十字板轉動角度、剪切力強度,電磁閥總電流及液壓艙內壓力傳感器回傳壓力值。貫入控制有貫入系統四路電磁閥啟停控制按鈕,三路電機啟動停止按鈕,以及四路探桿貫入深度閾值設定。
4 系統測試
根據水下密封艙內部空間尺寸進行設計,為減小空間,控制系統電路板層數設計為6層,控制系統實物總控板如圖11所示。總控系統電路板從裝置各系統實際安置位置設計總控板各模塊位置。控制系統總控板主要包括ARM+FPGA的核心模塊、供電模塊、狀態感知模塊、通信模塊以及數據存儲模塊。
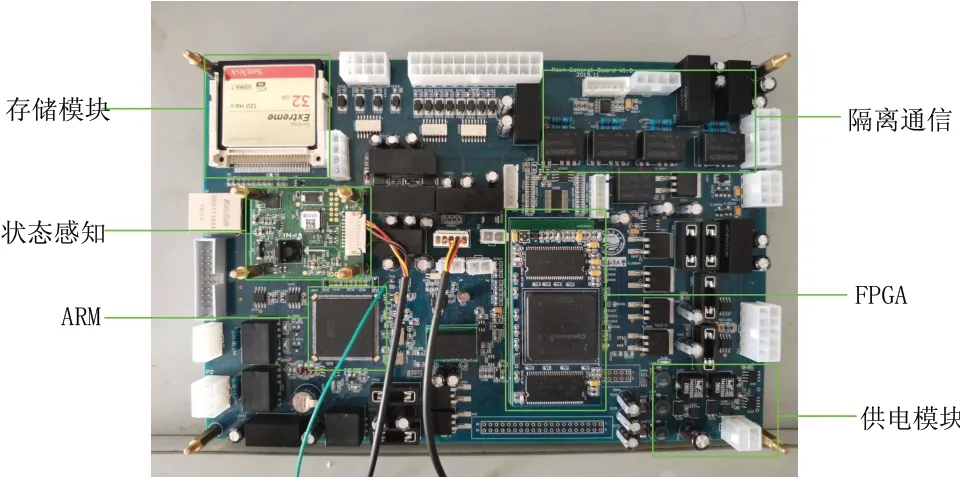
圖11 控制系統電路板
控制系統分別外接單獨子系統:水下攝像機,電磁線圈等。通過上位機發送供電指令,在控制板對應外接端子處均可測得設定的電壓值。外接子系統均可獲得額定電壓,攝像機、電磁線圈可以正常工作,系統功能測試實驗如圖12和圖13所示。
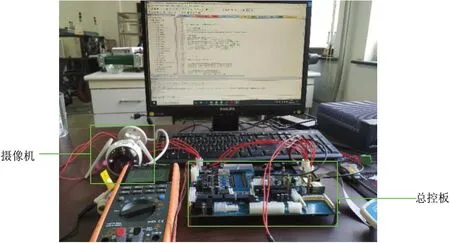
圖12 攝像機功能測試
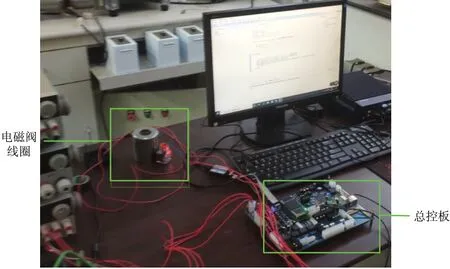
圖13 電磁閥功能測試
圖中攝像機可由上位機發送啟動命令,控制系統接收到命令后為攝像機供電,攝像機進入工作狀態將圖像信息存儲至內置SD卡中,可通過讀卡器讀取圖像信息。根據課題需求,將控制系統電磁閥端子外接24 V/35 W電磁線圈進行實驗,通過上位機控制總控板為電磁閥供電,檢測電磁閥端子電壓及電流均為額定值,分別將電磁線圈與每一路電磁閥外接端子相連并進行30 min通電實驗,實驗結果表明,電路設計合理MOS管過電流能力較強。
控制系統通過串口線直接與上位機連接進行信息傳輸及控制命令的接收,與采集儀及貫入電機驅動通過串口線相連進行信息采集與啟停命令的發送。控制系統可以接收到上位機發送的控制指令并作出對應控制命令的發送,ARM及FPGA均可實現采集儀信號的接收和對貫入系統電機的驅動命令下發。
控制系統在系統上電后設置艙內外環境數據自動上傳至上位機界面顯示,其中包括溫度、氣壓、高度計、方位姿態等傳感器獲得的數據。控制系統均可采集到每一個設計的傳感器回傳的數據并經過解析后上傳至上位機顯示。
為確保控制系統可以在裝置運行及工作的過程完成對裝置各子系統控制功能的實現,進行系統聯調。調試過程將水面上位機、貫入系統、采集儀、高度計、方位姿態傳感器均與控制系統連接,通過上位機對控制系統發送控制命令,控制貫入系統電機啟停、土力學探桿貫入,系統接收狀態傳感器回傳的數據解析后上傳至上位機顯示。全海深原位測試裝置如圖14所示。

圖14 原位測試裝置實物圖
整個裝置頂部放置浮體材料,裝置完成作業任務后拋載電機啟動拋去底部負載,裝置在浮體材料作用下上浮至水面完成裝置回收工作。裝置中間為四路電磁閥控制的四路土力學探桿及貫入系統,裝置底部四個浮球別為主控制艙、電機驅動艙、采集儀艙、水聲通信艙。
系統聯調過程,貫入電機啟動后,土力學探桿已具備貫入動力,對應探桿的電磁閥導通后探桿向下貫入。通過上位機發送控制指令,控制系統可以順利對貫入系統各個電機發出啟動和停止動作指令,控制電磁閥通斷進而控制對應土力學探桿貫入及拔出,實驗數據見表1。

表1 電磁閥啟停測試
測試過程中檢測總控板電池電壓、電流及電磁閥供電端子電壓、電流以保證總控板及電磁閥安全。總控板未給上電時,檢測電池電壓為23.9 V,電流為307 mA,電磁閥供電端子電壓電流均為0,探桿處于靜置狀態。上位機發出電磁閥啟動指令后,總控板電池電壓為24.3 V,總電流為1 832 mA,電磁閥電壓為23.9 V,電流為1 524 mA,探桿啟動,向下貫入。上位機發出電磁閥掉電指令后,總控板電池電壓、電流均回到初始狀態,電磁閥電壓、電流變為0,探桿向上提起至最高點。實驗數據表明,上位機可以控制總控板對電磁閥做出啟停控制,進而控制土力學探桿貫入或拔出。電磁閥測得的電流在電磁閥額定電流范圍內,表明控制電路設計合理。
經系統聯調測試,控制系統可以實現對于外接子系統控制命令的下達、通信傳輸等功能。
5 結 論
本文設計了一種針對全海深極端條件下原位測試裝置的基于高性能控制器ARM+FPGA的控制系統,將ARM、FPGA的優勢及特點結合起來應用到全海深原位測試當中,FPGA硬件可重構的特點使系統在裝置分艙的情況下易于維護,實現了水下控制系統進入全海深領域。系統設計搭載的高度計、姿態、溫度等傳感器的使控制系統實時感知深海環境,通過上位機獲取裝置運行狀態并判斷裝置所處工作階段,能夠使實驗裝置完成全海深環境下的目標任務。控制系統采取隔離的方式與外部系統通信、供電,提高了水下控制系統在分艙情況下的可靠性。數據采集與存儲采取實時上傳和內置存儲器兩種方式保證實驗數據的安全性。多種接口電路、通信方式、供電設計使控制系統可以應用于多種水下作業任務,提高了系統通用性及可拓展性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17