智能機(jī)械手發(fā)展及控制算法研究綜述
2021-06-25 14:18:52崔娟娟陳萬(wàn)培
軟件導(dǎo)刊 2021年6期
劉 頊,崔娟娟,陳萬(wàn)培,2,榮 靜
(1.揚(yáng)州大學(xué)廣陵學(xué)院 機(jī)械電子工程系;2.揚(yáng)州大學(xué) 信息工程學(xué)院,江蘇 揚(yáng)州 225000)
0 引言
隨著人工智能、現(xiàn)代控制技術(shù)、電子技術(shù)、仿真技術(shù)以及制造技術(shù)的發(fā)展,機(jī)器人在人類(lèi)生活、工業(yè)生產(chǎn)中所扮演的角色越來(lái)越多,代替人類(lèi)從事笨重、危險(xiǎn)而復(fù)雜的工作。機(jī)械手作為機(jī)器人執(zhí)行的最后環(huán)節(jié),在不同工況下對(duì)機(jī)器的友好性、穩(wěn)定性、靈敏性和精確性等要求各不相同。例如:在工廠車(chē)間中的大多是機(jī)械臂,代替人類(lèi)從事搬運(yùn)、安裝、分揀等工作。此類(lèi)為剛性機(jī)器人,大多為金屬、塑料等材料組裝完成,驅(qū)動(dòng)器為馬達(dá),工況大多單一,控制較為簡(jiǎn)單,整個(gè)系統(tǒng)為機(jī)電一體化設(shè)計(jì),整個(gè)商用系統(tǒng)非常成熟,雖然能夠?qū)崿F(xiàn)多自由度姿態(tài)變化,但是其運(yùn)動(dòng)特性存在限制,尺寸較大、柔順性較低。傳統(tǒng)的機(jī)器人大多集中在工業(yè)領(lǐng)域,隨著控制技術(shù)、傳感器技術(shù)、計(jì)算機(jī)技術(shù)的發(fā)展,機(jī)器人開(kāi)始服務(wù)于更多領(lǐng)域,在諸多領(lǐng)域中,往往環(huán)境復(fù)雜多變,這對(duì)機(jī)械手的靈敏性、柔順性及對(duì)環(huán)境的適應(yīng)性提出了更高要求。例如:殘疾人患者安裝的假肢或輔助助力醫(yī)療器械,不僅要兼顧外形的高匹配、使用時(shí)的靈敏度與靈巧性以及高仿生性,還要考慮機(jī)械手的柔順性、安全性以及人—機(jī)、機(jī)—環(huán)境交互的高效性和自然性。
1 研究現(xiàn)狀
經(jīng)過(guò)上萬(wàn)年勞作的演變,人類(lèi)手指有著高度的靈活性和自適應(yīng)性。各國(guó)研究人員投入大量的資金研發(fā)高仿生性的機(jī)械手,也出現(xiàn)了多種類(lèi)型的仿生手。最早的仿生手研究始于20 世紀(jì)60 年代末,通過(guò)在內(nèi)部安裝壓敏傳感器提供控制信號(hào),各關(guān)節(jié)的動(dòng)作由電動(dòng)機(jī)拉動(dòng)鋼絲完成。由于控制技術(shù)、材料等技術(shù)發(fā)展的局限,仿生手的自由度較低,單純依靠傳感器反饋控制實(shí)現(xiàn)人—機(jī)—環(huán)境交互在技術(shù)上實(shí)現(xiàn)難度較大且整個(gè)裝置比較笨重。20 世紀(jì)80 年代,各國(guó)研究相繼取得突破性進(jìn)展,仿生手的驅(qū)動(dòng)方式呈多樣性發(fā)展,同時(shí)也向著多自由度、多關(guān)節(jié)的方向發(fā)展,結(jié)構(gòu)也較為緊湊。日本研制的Hitachi 手率先使用形狀記憶合金驅(qū)動(dòng);在同一時(shí)期,麻省理工學(xué)院的Utah/MIT 仿生手采用氣動(dòng)驅(qū)動(dòng)。新的驅(qū)動(dòng)方式使得仿生手的反應(yīng)速度快、質(zhì)量更小,但是使用壽命短,運(yùn)動(dòng)可控性差。20 世紀(jì)90 年代后,隨著機(jī)電一體化技術(shù)、控制技術(shù)、材料技術(shù)以及仿生研究的發(fā)展,仿生手的研發(fā)成果呈現(xiàn)井噴式發(fā)展,外形、功能、自由度等各項(xiàng)更加接近人手。日本NAIST 研發(fā)出一款多指機(jī)械手,手掌中直接嵌入3 個(gè)驅(qū)動(dòng)器,使用多跟連桿和齒輪傳動(dòng),內(nèi)嵌小型攝像機(jī)和力傳感器[1]。目前,仿生手的研究基本處于實(shí)驗(yàn)室階段,但已取得顯著成果。2009 年,瑞士的研究人員開(kāi)發(fā)出一款具有觸感的仿生手雛形,該仿生手通過(guò)電極與患者神經(jīng)系統(tǒng)相連接,從而建立觸覺(jué)的雙向聯(lián)系。2013 年,瑞士洛桑聯(lián)邦高等理工學(xué)校希爾維斯特羅·米克拉博士作進(jìn)一步優(yōu)化,制造出世界第一款能夠嚴(yán)密與上肢建立聯(lián)系,并且實(shí)時(shí)傳遞抓握觸感的義肢[2]。芝加哥康復(fù)研究所神經(jīng)工程中心研發(fā)一款仿生手臂,通過(guò)肌電傳感器感受神經(jīng)和肌肉活動(dòng),從而帶動(dòng)仿生手進(jìn)行相應(yīng)的活動(dòng)。目前,國(guó)內(nèi)市面上存在一款利用生物電流技術(shù),通過(guò)電極傳感器讀取向肌肉發(fā)出的信號(hào)實(shí)現(xiàn)動(dòng)作控制[3]。以上為剛性機(jī)械手,缺少相應(yīng)的柔順性和安全性,在抓取物體時(shí)不能保證易碎物品的完整。
剛性仿生手較高自由度和精確的力度需要復(fù)雜的傳感器和控制算法,使得仿生手造價(jià)高、結(jié)構(gòu)復(fù)雜,研究人員開(kāi)始考慮使用柔性材料設(shè)計(jì)制造仿生手。哈佛大學(xué)的研究人員設(shè)計(jì)出一款氣動(dòng)網(wǎng)絡(luò)結(jié)構(gòu)的軟體康復(fù)手套,該手套利用流體彈性制動(dòng)器實(shí)現(xiàn)手套的彎曲變形,并在外部纏繞纖維材料限制手指的變形方向,從而達(dá)到輔助患者操作抓取物品的目的[4]。德國(guó)柏林大學(xué)研發(fā)出一款基于氣動(dòng)執(zhí)行器的RBO Hand,該仿生手手指為硅膠制成,研究人員通過(guò)機(jī)器學(xué)習(xí)算法訓(xùn)練抓取。加州大學(xué)伯克利分校的研究人員進(jìn)一步優(yōu)化RBO Hand,利用機(jī)器強(qiáng)化算法自學(xué)人手動(dòng)作,實(shí)現(xiàn)了靈巧執(zhí)行任務(wù)。首爾大學(xué)Kim 等[5]選擇直接可變形的形狀記憶合金作為驅(qū)動(dòng)器,制作出一款軟體手,通過(guò)改變仿生手剛度抓取不規(guī)則形狀物體。
盡管柔性仿生手具有很好的柔順性,但是與真實(shí)手的結(jié)構(gòu)相差較大,存在魯棒性和精確性差的問(wèn)題[6-7]。近期,研究者們開(kāi)始考慮將剛性部件與柔性部件相結(jié)合,以彌補(bǔ)剛性與柔性仿生手的不足,已成為研究熱點(diǎn)。
剛—柔耦合仿生手可以從生物學(xué)意義上模擬人手,為了實(shí)現(xiàn)仿人手的功能,研究者們從解剖學(xué)的角度設(shè)計(jì)出多種類(lèi)似生物手的機(jī)械裝置。楊浩[8]基于形狀記憶合金研發(fā)出仿生靈巧手,該仿生手不論從外形還是觸感都最大程度地模仿人手,安裝有皮膚組織、骨骼和肌肉。手的骨骼結(jié)構(gòu)主要是由3D 打印制成,關(guān)節(jié)處嵌入霍爾傳感器,驅(qū)動(dòng)器采用SMA 彈簧驅(qū)動(dòng),皮膚由硅膠澆筑而成[9]。該仿生手一共有16 個(gè)自由度,已無(wú)限接近人手21 個(gè)自由度。韓國(guó)三星公司將直徑3.5mm 的McKiben 型氣動(dòng)人工肌肉技術(shù)應(yīng)用于仿生手研究;日本東京工業(yè)大學(xué)鈴森康一教授團(tuán)隊(duì)研發(fā)出1.3mm 與2mm 直徑細(xì)徑McKiben 型氣動(dòng)人工肌肉,進(jìn)一步提高了氣動(dòng)人工肌肉的精度[10];上海大學(xué)南卓江等[11]將1.3mm 與2mm 直徑細(xì)徑McKiben 型氣動(dòng)人工肌肉作為柔性執(zhí)行器研發(fā)出一種剛—柔耦合仿生手并通過(guò)構(gòu)建BP 神經(jīng)網(wǎng)絡(luò)運(yùn)動(dòng)學(xué)模型驗(yàn)證了其運(yùn)動(dòng)性能。謝勝龍等[13]綜合現(xiàn)有研究進(jìn)展總結(jié)出氣動(dòng)人工肌肉的控制策略并提出該形式的仿生手運(yùn)動(dòng)過(guò)程中存在遲滯、蠕變、運(yùn)動(dòng)精度等問(wèn)題,并給出解決問(wèn)題的關(guān)鍵途徑。
2 仿生手材料與驅(qū)動(dòng)
2.1 仿生手材料
傳統(tǒng)剛體機(jī)器人的制作材料一般為剛性材料,如金屬、硬質(zhì)塑料等,一般為楊氏彈性模量109與1012帕之間,驅(qū)動(dòng)方式通常為電機(jī)、液壓、氣壓驅(qū)動(dòng),驅(qū)動(dòng)力可以達(dá)到毫牛到兆牛之間。工業(yè)機(jī)器人坐標(biāo)系比較簡(jiǎn)單,一般分為4 種,如表1 所示。
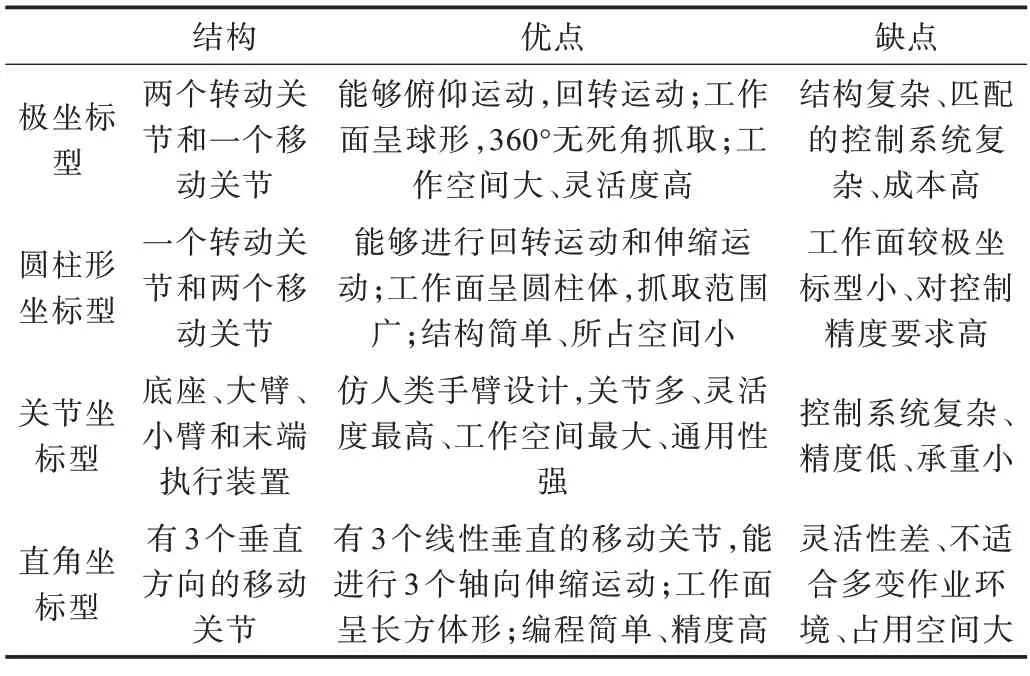
Table 1 Industrial robot structure表1 工業(yè)機(jī)器人結(jié)構(gòu)
柔性機(jī)器人或剛?cè)狁詈蠙C(jī)器人的出現(xiàn)提高了機(jī)器人的柔順性和適應(yīng)環(huán)境的靈活性。軟體材料也呈多樣化發(fā)展,軟質(zhì)橡膠(彈性模量接近1GPa)、硅膠、編織物、紙、纖維、形狀記憶合金(Shape Memory Alloy,SMA)等。根據(jù)用途不同,軟體仿生手的材料和制造技術(shù)也大不相同。目前,成本低、效率高的方法為鑄造倒模,而材料的選擇也會(huì)影響制造方法。3D 打印技術(shù)的發(fā)展極大方便了柔性零件制造,為多種材料融合性使用提供了靈活性,也提高了軟體手結(jié)構(gòu)的緊湊性[13]。
柔性手材料在發(fā)展中的另一個(gè)重要問(wèn)題是對(duì)通訊、觸覺(jué)、控制等方面的可控性[14]。軟體手在執(zhí)行任務(wù)時(shí)需要發(fā)生較大的形變,這就要求其中的通訊、電路、傳感器具有能夠承受一定形變的能力。隨著聚合物晶體管與彈性材料技術(shù)融合發(fā)展,在軟材料表層進(jìn)行電路印刷以及電子元件制備的柔性電子技術(shù)日益成熟,出現(xiàn)了具有良好生物性能的電子皮膚,實(shí)現(xiàn)了軟體手可穿戴功能[15-17]。
2.2 仿生手驅(qū)動(dòng)
驅(qū)動(dòng)技術(shù)是仿生手發(fā)展的另一個(gè)關(guān)鍵技術(shù)。當(dāng)前大多數(shù)剛性機(jī)械手多以直流電機(jī)作為執(zhí)行器,一般安裝于手指關(guān)節(jié)處。直流電機(jī)具有響應(yīng)速度快、控制精度高、控制簡(jiǎn)單、輸出力矩大等特性,但是這些固有特性使得仿生手存在質(zhì)量大等問(wèn)題。為了解決這些問(wèn)題,研究者們采用電機(jī)后置,通過(guò)腱傳動(dòng)或拉線輔助驅(qū)動(dòng)的方式,但是此驅(qū)動(dòng)方式由于摩擦、松弛產(chǎn)生能量損耗,效果并不理想。
柔性以及半柔性仿生手的驅(qū)動(dòng)與剛體機(jī)器人不同,驅(qū)動(dòng)通常與柔性材料構(gòu)成整體結(jié)構(gòu),通過(guò)外界刺激比如流體壓力、化學(xué)反應(yīng)、電場(chǎng)、類(lèi)肌腱驅(qū)動(dòng)等方式實(shí)現(xiàn),不同結(jié)構(gòu)不同加工方式的柔性手所需的驅(qū)動(dòng)方式也不盡相同,且各部件驅(qū)動(dòng)方式不唯一。4 種驅(qū)動(dòng)方式如表2 所示。
2.2.1 流體壓力驅(qū)動(dòng)
流體壓力驅(qū)動(dòng)一般有兩種方式,一般分為氣壓式和液壓式。在彈性材料內(nèi)部有一系列呈封閉狀態(tài)的腔體,通過(guò)纖維約束或氣動(dòng)網(wǎng)格,當(dāng)外部流入不同壓力的氣體或液體時(shí),通過(guò)內(nèi)部張力不同控制形變程度。氣壓驅(qū)動(dòng)結(jié)構(gòu)簡(jiǎn)單、獲得方便、質(zhì)量輕,廣泛應(yīng)用于各位機(jī)器人驅(qū)動(dòng)。氣壓驅(qū)動(dòng)從供氣方式上可分為壓縮供氣(物理供氣)和化學(xué)反應(yīng)供氣。McKiben 型氣動(dòng)人工肌肉為目前仿生性較好的驅(qū)動(dòng)執(zhí)行器,由橡膠管外層編制纖維套,如圖1 所示。其一端與仿生骨骼相連,另一端與送氣管相連,如圖2 所示,通過(guò)調(diào)節(jié)內(nèi)部氣壓收縮手指達(dá)到驅(qū)動(dòng)功能。
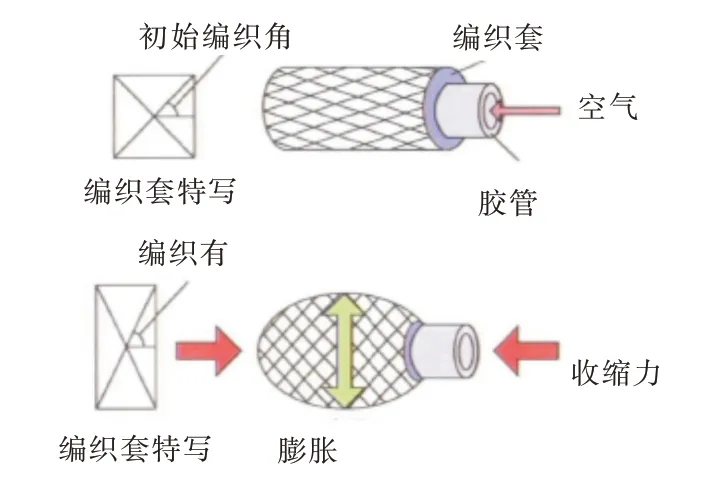
Fig.1 McKiben pneumatic artificial muscle圖1 McKiben 型氣動(dòng)人工肌肉
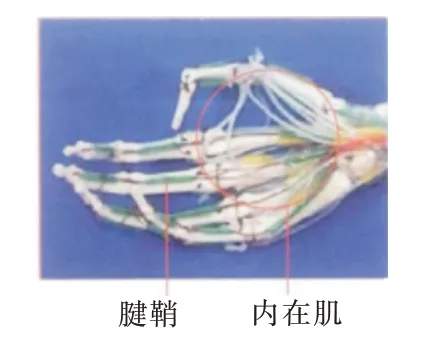
Fig.2 Mckiben pneumatic artificial muscle bionic hand圖2 McKiben 型氣動(dòng)人工肌肉仿生手
2.2.2 類(lèi)肌腱驅(qū)動(dòng)
繩索拉動(dòng)驅(qū)動(dòng)是實(shí)現(xiàn)類(lèi)肌腱驅(qū)動(dòng)的一種方式,通常由電機(jī)或舵機(jī)帶動(dòng)繩索驅(qū)動(dòng)工作部件。繩索通常選擇在長(zhǎng)度方向上有一定強(qiáng)度、在其他方向上易于彎曲且不易發(fā)生形變的材料。拉線驅(qū)動(dòng)結(jié)構(gòu)較為復(fù)雜,對(duì)繩索線路的制造精度以及結(jié)構(gòu)緊湊性要求較高,以防產(chǎn)生較大的摩擦,影響驅(qū)動(dòng)效果。此外,由于結(jié)構(gòu)復(fù)雜,對(duì)控制系統(tǒng)的要求也較高。
另一種較為主流的類(lèi)肌腱驅(qū)動(dòng)方式為形狀記憶合金(SMA)。SMA 是一種智能材料,在不同的溫度下能表現(xiàn)出不同的機(jī)械性能和形狀,一般被制成絲狀、片狀或彈簧形狀。目前,一般用電控制溫度,運(yùn)用電控技術(shù)控制較為簡(jiǎn)單。單程SMA 在變形后需要冷卻才能恢復(fù)原狀,往往成對(duì)對(duì)抗使用以達(dá)到連續(xù)驅(qū)動(dòng)的目的。
2.2.3 電活性聚合物(EAP)驅(qū)動(dòng)
電活性聚合物是一種在電場(chǎng)作用下能夠改變內(nèi)部分子排列結(jié)構(gòu)以達(dá)到形變目的的高分子智能材料。EAP 具有較強(qiáng)的電化學(xué)性能,響應(yīng)速度快、質(zhì)量輕、能耗低,同時(shí)還能充當(dāng)傳感器,結(jié)構(gòu)簡(jiǎn)單、控制方便,因此在柔性機(jī)器人領(lǐng)域的應(yīng)用前景較為廣闊。
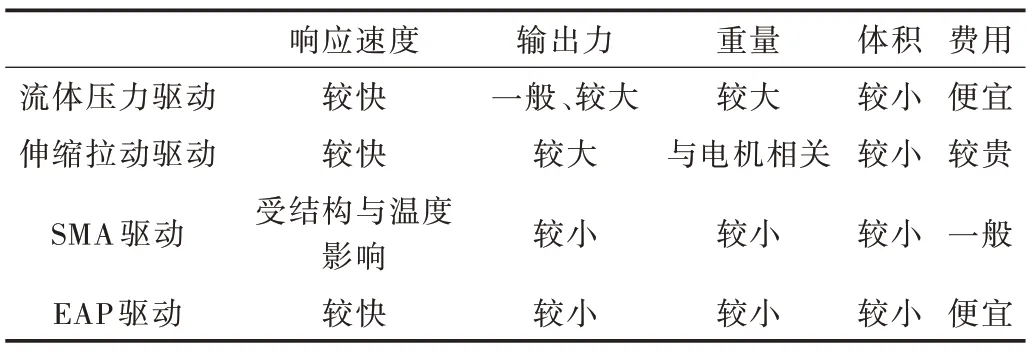
Table 2 Four driving modes表2 4 種驅(qū)動(dòng)方式
3 機(jī)械手仿真與控制算法
機(jī)械手結(jié)構(gòu)較為復(fù)雜,不同的結(jié)構(gòu)控制方法也不盡相同。傳統(tǒng)的剛性機(jī)械手一般由機(jī)械結(jié)構(gòu)、傳感器、控制器構(gòu)成,整個(gè)系統(tǒng)具有較強(qiáng)的非線性、外界干擾較大、各關(guān)節(jié)存在相互耦合的特點(diǎn),整個(gè)系統(tǒng)的動(dòng)力學(xué)模型非常復(fù)雜,很難實(shí)現(xiàn)精準(zhǔn)控制。在未加入執(zhí)行器動(dòng)態(tài)的情況下,一般采用基于PID 的控制算法[18]、前饋力矩補(bǔ)償+PD 算法魯棒控制算法[19-21],這些算法各有優(yōu)點(diǎn),但不適用于剛體機(jī)械手耦合的情況,可能會(huì)產(chǎn)生震顫現(xiàn)象,損傷系統(tǒng)。1966 年,Slotine 等[22]與Young[23]最早提出變結(jié)構(gòu)滑模控制算法,解決了控制中模型不確定性的問(wèn)題。自適應(yīng)控制算法利用在線的控制信號(hào)通過(guò)設(shè)計(jì)好的規(guī)律對(duì)被控對(duì)象參數(shù)進(jìn)行在線估計(jì),在一定程度上減少了慢變不確定參數(shù)的影響。目前,已有相關(guān)研究將自適應(yīng)算法與變結(jié)構(gòu)滑模塊變結(jié)構(gòu)算法相結(jié)合,取得不錯(cuò)的效果。
1991 年,Kanellakopoulos 系統(tǒng)地提出Backstepping 魯棒自適應(yīng)設(shè)計(jì)方法,通過(guò)將控制系統(tǒng)分解成簡(jiǎn)單的耦合系統(tǒng),反復(fù)地引入虛擬控制,并利用Lyapunov 穩(wěn)定性函數(shù)設(shè)計(jì)每一步虛擬控制,最終得到實(shí)際控制輸入算法[24]。目前,該算法已成為非線性控制的前沿課題之一,并取得較多研究成果。研究者們傾向于結(jié)合Backstepping 算法、自適應(yīng)算法和滑模控制算法,取得更好的控制效果[25-27]。
剛性結(jié)構(gòu)自由度較高,可以看成關(guān)節(jié)與連桿結(jié)構(gòu),通過(guò)數(shù)學(xué)方法可以找到末端執(zhí)行器的空間和姿態(tài)。與剛性連桿關(guān)節(jié)的離散性與超冗余相比,柔性仿生手由于彈性變形而具有柔順性和連接性,運(yùn)動(dòng)更為復(fù)雜。目前其控制方法也較為復(fù)雜。柔性機(jī)器人控制算法選擇與其驅(qū)動(dòng)部件密切相關(guān),柔性手本身具有適應(yīng)性和柔順性,這對(duì)末端執(zhí)行器的輸出力要求有所降低,因此可采用開(kāi)環(huán)控制。有的采用傳統(tǒng)控制方法,如基于BP 神經(jīng)網(wǎng)絡(luò)建模。一般對(duì)柔性機(jī)械臂運(yùn)動(dòng)學(xué)建模的研究可分為3 類(lèi):純運(yùn)動(dòng)學(xué)建模、集總參數(shù)動(dòng)力學(xué)建模和連續(xù)介質(zhì)力學(xué)建模。純運(yùn)動(dòng)學(xué)建模已應(yīng)用于肌腱驅(qū)動(dòng)或啟動(dòng)驅(qū)動(dòng)的柔性臂。一般是基于分段常區(qū)率彎曲的假設(shè),在沒(méi)有外部載荷或外部載荷足夠小的情況下,該方法非常有效。Simo 等[28]對(duì)大動(dòng)撓度梁進(jìn)行了基礎(chǔ)性研究,利用能量法分析了由基座扭矩驅(qū)動(dòng)的柔性機(jī)器人手臂的撓度,這項(xiàng)研究經(jīng)常被看作是當(dāng)代連續(xù)體機(jī)器人分析的基礎(chǔ);Habibi 等[29]受蛇類(lèi)運(yùn)動(dòng)機(jī)制啟發(fā),建立了一系列有趣的彈性模塊肌腱驅(qū)動(dòng)臂。他建立了從機(jī)械臂構(gòu)型到肌腱位移的逆運(yùn)動(dòng)學(xué)模型,該模型假設(shè)肌腱在任何時(shí)候都處于拉伸狀態(tài),但并不試圖模擬它們的拉伸。在假定為剛性肌腱的情況下,機(jī)械手的軸向長(zhǎng)度參數(shù)在非線性運(yùn)動(dòng)學(xué)模型中也被建模為純幾何項(xiàng)。隨著氣動(dòng)人工肌肉成為最新研究熱點(diǎn),研究者們提出了諸多建模方法和控制方法。楊揚(yáng)等[30]基于有監(jiān)督的BP 神經(jīng)網(wǎng)絡(luò)運(yùn)動(dòng)學(xué)對(duì)仿生手構(gòu)建運(yùn)動(dòng)模型,通過(guò)多次測(cè)試,建立數(shù)學(xué)模型,改善了傳統(tǒng)的線性模型誤差較大的問(wèn)題。這種方法模型簡(jiǎn)單,但是需要大量的數(shù)據(jù)樣本作為訓(xùn)練,比較耗時(shí),且可移植性不高。CamaRillo 等[31]構(gòu)建了一種新的線性模型-n 腱位移與梁構(gòu)型之間的正逆運(yùn)動(dòng)學(xué)映射,將柔性梁系統(tǒng)作為一個(gè)整體的力學(xué)系統(tǒng),該模型在實(shí)現(xiàn)精確控制和避免柔性肌腱松弛方面有良好效果,目前該算法較為領(lǐng)先。采用集總參數(shù)模型描述的末端執(zhí)行器的動(dòng)態(tài)響應(yīng)也取得不錯(cuò)的效果[32-34]。連續(xù)介質(zhì)力學(xué)方法是基于分布參數(shù)模型,允許任意變形生成響應(yīng)的外部載荷,基于該算法也有大量研究[35-36]。
目前,剛體機(jī)械手的商業(yè)應(yīng)用較廣,研究也較為成熟。柔性機(jī)械手的運(yùn)動(dòng)復(fù)雜,控制算法多處于理論研究階段,國(guó)內(nèi)研究更為淺顯,在算法上多有創(chuàng)新,穩(wěn)定性欠佳,尚有較大研究空間。
4 結(jié)語(yǔ)
智能仿生機(jī)械手是智能機(jī)器人的重要分支,在諸多領(lǐng)域替代人類(lèi)完成工作,幫助人類(lèi)從事多種危險(xiǎn)或不可能完成的任務(wù)。目前,工業(yè)機(jī)器人的發(fā)展已經(jīng)實(shí)現(xiàn)成熟的商業(yè)化,但在農(nóng)業(yè)、醫(yī)療、殘疾、救援輔助等方面的應(yīng)用還不夠成熟。柔性或半柔性機(jī)器人對(duì)環(huán)境的適應(yīng)性、安全性具有更好的優(yōu)勢(shì),但在傳感器、電化學(xué)、控制、材料等方面存在不足,各種驅(qū)動(dòng)方式的運(yùn)用還存在諸多缺點(diǎn)。并且,仿生手對(duì)環(huán)境的感知及人機(jī)協(xié)作也沒(méi)得到解決,控制算法也尚處于實(shí)驗(yàn)室階段,未來(lái)發(fā)展存在無(wú)限可能,這都有待進(jìn)一步研究。
