車窗位置采集方法與研究
2021-06-26 07:23:10包呼日查楊慧凱關忠旭宮成林李林男
汽車實用技術 2021年11期
關鍵詞:信號
包呼日查,楊慧凱,關忠旭,宮成林,李林男
(中國第一汽車股份有限公司 智能網聯開發院,吉林 長春 130011)
1 前言
電動車窗已經成為現代汽車的標配,市面上的絕大多數車型都配備了自動升降功能,因此,車窗在自動上升過程中有夾傷乘客的風險。考慮到這個潛在風險,國家法規強制要求具備自動上升功能的必須配備防夾功能,并且規定了防夾區域和防夾力的大小及測試方法[1]。本文著重闡述基于霍爾防夾方案,車門控制器采集車窗電機霍爾信號,確定車窗位置的方法,準確判斷車窗位置是有效識別防夾區域內的夾住障礙物的基礎。若車窗位置采集錯誤,可能會導致誤防夾或者自動升不到頂的問題。
2 總體方案概述
2.1 系統原理
霍爾電機內部原理見圖1 所示,在車窗電機輸出軸上安裝一個磁環,電機內部安裝一個帶有霍爾傳感器的PCB 板,當電機轉動一圈,霍爾傳感器就能采集到若干個方波信號,具體信號數量與電機磁極數目有關[2]。

圖1 霍爾電機內部原理圖
本文采用的霍爾電機為博世FPG2 系列,可輸出兩路霍爾信號,通過判斷兩路霍爾信號相位的先后來確定車窗運動方向[3],霍爾信號示意圖如下圖2 所示。
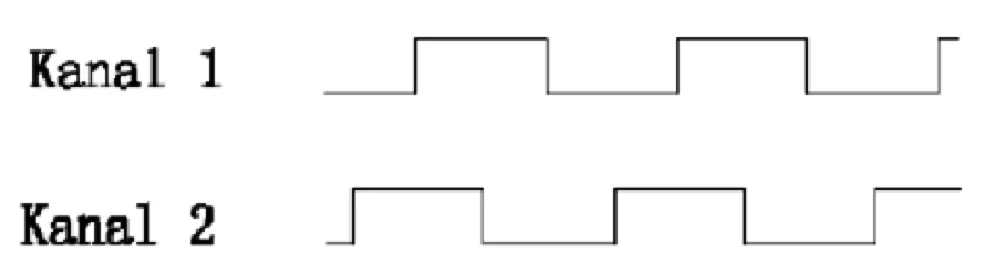
圖2 霍爾信號示意圖
通常將車窗升到頂的位置記為零點位置,下降過程中每產生一個霍爾信號就加一,上升過程中每產生一個霍爾信號就減一。在車輛下線前,通過EOL 設備首先執行車窗自動上升,確定頂部位置,然后再執行下降到頂和上升到頂的動作,完成車窗位移和運行阻力的學習過程。
2.2 系統方案
車門控制器中的車窗位置采集系統主要包括霍爾供電電路、霍爾信號采集電路、電機驅動電路和電機中的霍爾電路[4]。系統原理圖見下圖3 所示。
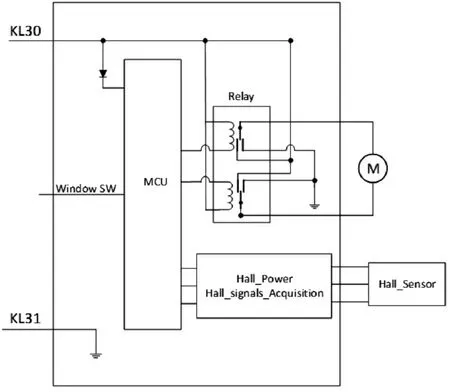
圖3 霍爾電機接口電路
霍爾采集電路和霍爾供電電路分別見下圖4和圖5所示。當車門控制器喚醒后,MCU_1 會輸出一個高電平,圖5 中的兩個三極管都導通后,HALL_POWER 端會輸出約12V,車門控制器霍爾信號采集的中斷同步會打開,在車門控制器休眠后,MCU_1 會輸出一個低電平,同時關閉霍爾信號采集的中斷。

圖4 控制器端霍爾采集接口電路

圖5 控制器端霍爾供電電路
3 測試驗證
3.1 耐久測試
3.1.1 測試方案
測試臺架如下圖6 所示,在校正完零點位置后,開始進行車窗升降,軟件中設定了車窗的上軟停和下軟停位置,每升降10 次,將車窗降到下止點,與第一次降到下止點的位置進行比較,一共升降60 次。車窗位置可通過基于CANOE 開發的上位機進行讀取,見圖7 所示。

圖6 臺架測試
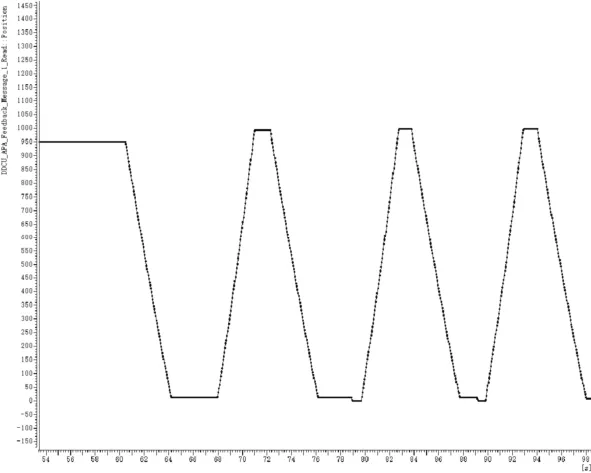
圖7 車窗位置
3.1.2 測試結果
經過60 次的車窗升降耐久后,發現車窗無法完全關閉,車窗下止點的位置與第一次降到下止點的位置相比霍爾數少了60,同步比較了第10 次、20 次、30 次、40 次和50 次的數據,發現每運行10 次,下止點霍爾數就會減少10 個。
3.2 休眠喚醒測試
3.2.1 測試方案
在校正完車窗零點位置后,將車窗降到記錄底部位置,再將車窗位置停在中間某個位置,車門控器供12V 常電,再讓控制器進行20 次休眠喚醒,第20 次喚醒后,將車窗降到底,比較底部位置。
3.2.2 測試結果
經過20 次休眠喚醒后,車窗到底部霍爾數增加了40 個,排查了一下每次休眠和喚醒后,霍爾數會分別增加1 個,使用示波器測試了一下休眠和喚醒過程中電機霍爾信號的變化情況,見圖8 和圖9 所示。第一行波形代表霍爾電源,第二行和第三行代表霍爾信號,在控制器網絡休眠后,霍爾電源會關閉,此時這兩路霍爾信號會同時從高電平拉低到低電平,由于霍爾采集未關閉,導致控制器誤采集此信號。在控制器喚醒后,由于霍爾采集在霍爾電源打開前打開了,導致霍爾信號的跳變被采集到。

圖8 喚醒后控制器采集到的霍爾信號

圖9 睡眠前控制器采集到的霍爾信號
3.3 刷寫測試
3.3.1 測試方案
在校正完車窗零點位置后,將車窗降到底記錄底部位置,再將車窗位置停在中間某個位置,車門控制器供12V 常電,刷寫控制器程序,然后將車窗降到底。
3.3.2 測試結果
在進行了10 次刷寫后,車窗當前位置會隨機進行變化,自動上升后,可能會出現到頂誤防夾,也可能會出現無法完全關閉的情況,斷掉12V 電源,重新進行車窗自學習后,車窗位置恢復正常。
4 改進措施及驗證
4.1 改進措施
針對測試問題,提出了如下改進措施,如表1 所示。
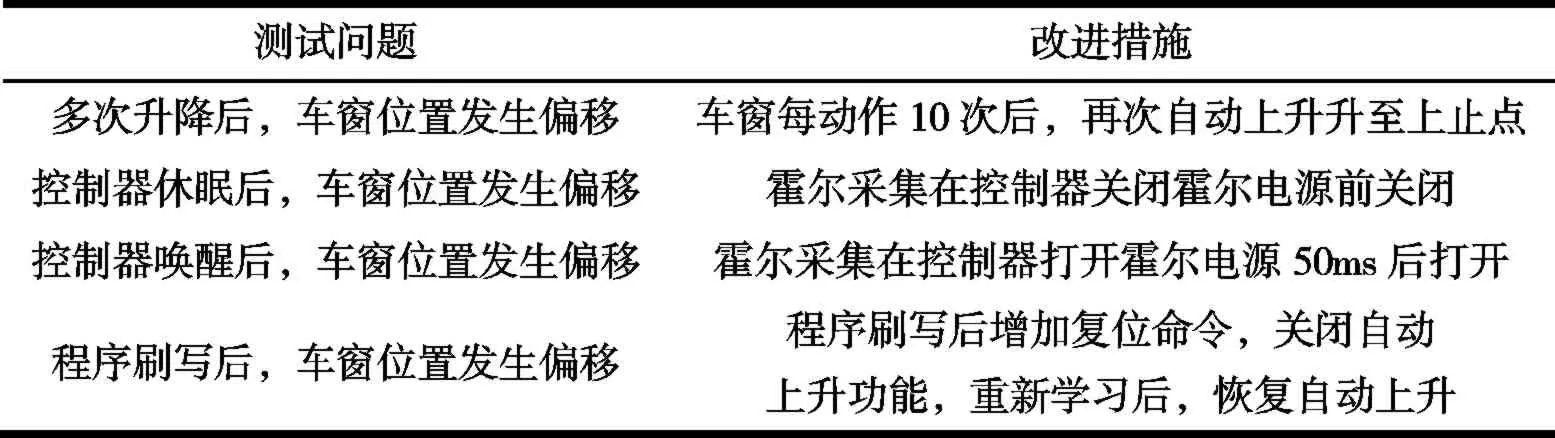
表1 測試問題及改進措施
4.2 措施驗證
針對上述問題驗證方案和改進效果如下表2 所示。

表2 驗證方案及改進效果
5 結束語
本文通過臺架測試的手段,對車窗位置采集的方法進行了研究和探討,針對實車常經歷的工況進行多次測試,優化位置采集策略,在提升車窗控制性能的同時,也提升了用戶用車體驗。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
