基于參差中重頻脈組的搜索雷達跟蹤波束設計*
2021-06-26 03:58:50朱永杰薛廣然
火力與指揮控制 2021年5期
朱永杰,蘇 巧,嚴 超,薛廣然
(1.西安電子工程研究所,西安 710100;2.陸裝駐西安地區第六軍代室,西安 710100)
0 引言
搜索雷達在現代戰爭中肩負著指定空域的監視任務,對空中目標進行搜索、發現和跟蹤,并將目標位置信息提供給防空武器系統。隨著制導技術的不斷發展,有些搜索雷達可直接為武器系統提供中制導信息。因此,搜索雷達對目標探測的穩定性和探測精度提出更高的要求,尤其是對于已進入攔截火力分配通道的目標。傳統搜索雷達采用邊搜索邊跟蹤(TWS)模式,對監視空域進行波束順序掃描[1-2],雷達空間資源配置固定,數據率偏低。在強氣象、地物雜波及電磁干擾環境下,易出現目標檢測概率下降、航跡拉偏斷航等狀況,難以滿足武器系統對特定目標持續穩定跟蹤的要求[3]。針對上述問題,本文提出為搜索雷達設計跟蹤波束,對特定目標采用基于目標預測信息的多組參差中重頻檢測方式工作。通過設置多組中重復頻率探測波形組合,可以有效擴展速度檢測清晰區范圍,相對常規的低重頻探測波形,能夠有效抑制慢速氣象雜波及強地物雜波剩余,并改善因速度模糊導致的檢測性能下降;通過預測信息實現目標距離、速度雙模糊的快速解算,提高探測精度(速度精度);同時,跟蹤波束對特定目標進行空域集能處理,有效地增加目標觀測能量和觀測數據率,提高特定目標的檢測概率[4-5]。
1 跟蹤波束設計
某技術體制為方位機械旋轉加俯仰維相掃有源三坐標雷達,主要作戰模式下,天線以15 r/min 的轉速在方位上勻速轉動,根據被觀測目標的仰角位置的不同,波束在俯仰上通過電掃順序發射x 個波束寬度約為6°的發射波束,形成2x 個寬度約為3°的接收波束,對要求空域進行覆蓋,該雷達在當前作戰模式下無跟蹤波束。
針對該雷達上述作戰模式需求,設計跟蹤波束,當被跟蹤目標釋放有源干擾或需要對某一目標重點關注時,犧牲對該目標所在方位上其他仰角區域的空域監視,對該干擾目標實施集能工作方式,即天線在方位上旋轉到目標所在角度時,波束在俯仰角上不再掃描,而是將方位波束駐留時間內的所有能量集中在被觀測目標上,實現重點目標的跟蹤。其處理流程如下:
1)雷達在傳統TWS 搜索模式下獲得目標航跡;
2)發現需特別關注的目標后,通過終端控制進入跟蹤模式,輸入需進行跟蹤的目標批號;
3)終端通過數據處理預測該目標下一幀位置,并在天線掃至該目標前向信號處理及前端預置方位、俯仰信息;
4)當天線掃至預置方位時,雷達由俯仰順序掃描方式變為采用中重頻脈組的固定波束,該波束指向為數據處理預測俯仰波位;
5)信號處理按組進行MTI-MTD 處理,CFAR檢測后輸出目標信息;
6)信號處理根據數據處理的預測信息對實際探測的目標信息進行距離、速度解模糊;
7)信號處理對探測多次的目標信息進行凝聚,并輸出給終端;
8)終端的數據處理進行點跡關聯處理,最終形成點跡并顯示。
2 基于目標先驗信息的波束調度設計
數據處理收到信號處理發送的目標點跡數據后,剔除虛假航跡,經濾波相關后形成目標的真實航跡,并預測目標下一幀位置。雷達進入跟蹤模式后,在需跟蹤目標所在方位采用固定波位探測方式,其他方位仍然使用順序掃描方式。啟用固定波位探測方式,需要根據航跡預測結果確定啟用固定波位探測的方位角,同時設定波束的俯仰指向角。
啟用固定波位探測方式的天線碼盤轉角,按照下式設計:

其中,Preazimuth 為跟蹤目標預測方位角,Azimuth-Code 為方位碼盤,Amend 為修正量,補充因處理和通信延時引起的指向滯后問題,BeamWid 為雷達方位波束寬度,滿足該條件時啟用固定波位探測,否則采用順序掃描方式。
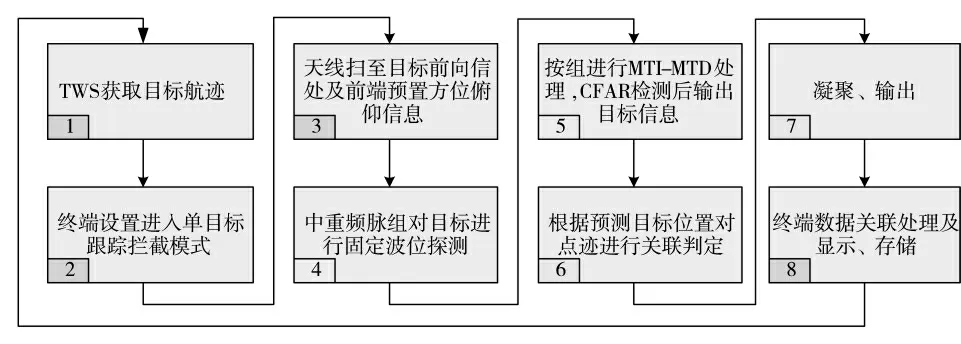
圖1 跟蹤模式處理流程

3 中重復頻率波形設計
在對跟蹤目標進行固定波位跟蹤探測時,采用中重頻探測波形[7]。根據時序設計要求,方位駐留時長與原搜索模式的順序掃描保持一致,在駐留時間內,設計4 組脈沖串進行探測:第1 組為低重復頻率脈沖串,含8 個脈沖,進行距離不模糊探測(簡化解模糊);后3 組為頻點和PRF 都不同的中重頻脈沖串,每組按16 個脈沖設計,采用2 點MTI(或3點MTI)級聯16 點FFT 濾波器處理。如表1 所示。
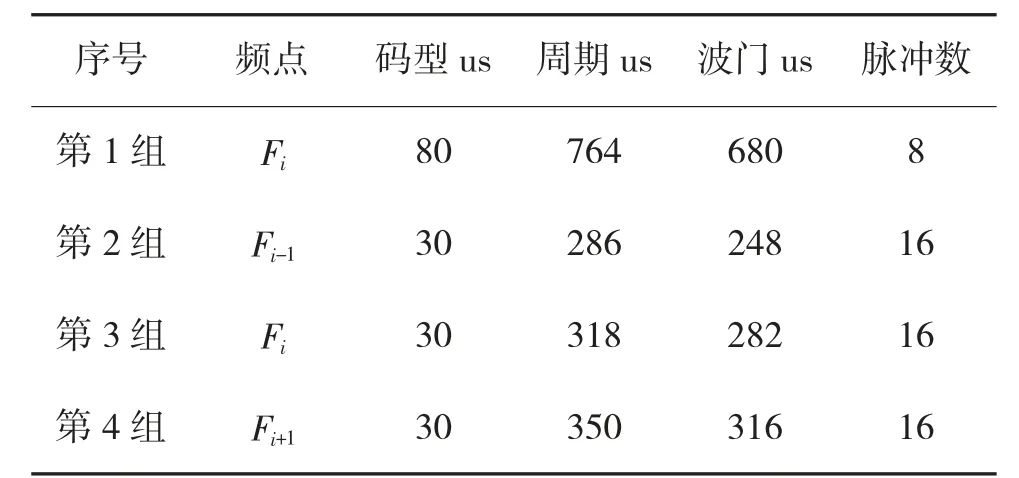
表1 跟蹤模式下的波形設計
采用如上所述3 組MPRI 的濾波器聯合響應仿真結果如圖2 所示,反應雷達RD 探測特性的斑馬圖如圖3 所示。由仿真結果知,采用3 組MPRI 的時序配置可有效降低目標落入盲速區所帶來的影響,具有較好的探測覆蓋能力,再加上第1 組的常規探測脈沖,能夠較好地實現目標跟蹤探測。
該設計相較于傳統低重頻順序掃描的探測,在一個方位駐留內可進行4 次檢測,若雷達單次檢測概率為90%,則理論上可將該方位駐留內的檢測概率提高至1-(1-90 %)^4=99.99 %;多組MFRI 讓雷達具有更大的速度清潔區以及更好的低速雜波抑制能力,提高單次測速能力和測速精度。
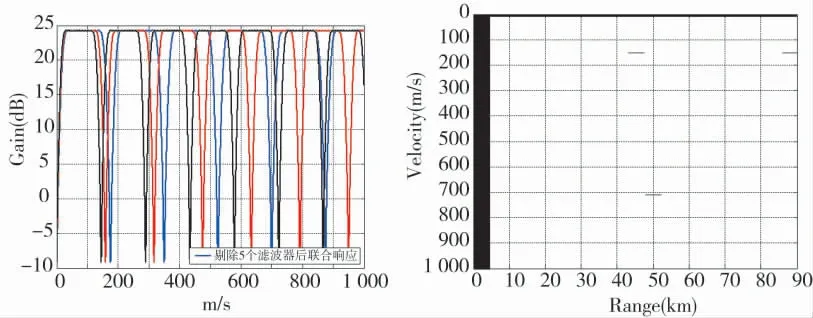
圖2 3 組MPRI 濾波器聯合響應
4 目標先驗信息的距離/速度解模糊
圖3 3 組PRI 形成的探測斑馬圖
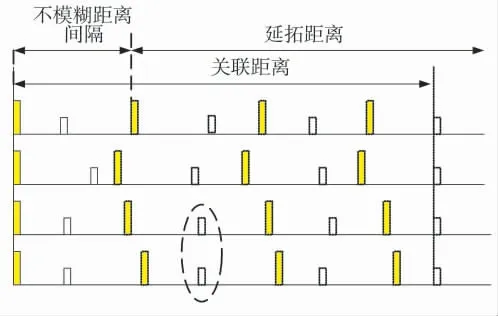
圖4 距離解模糊方法
如果單視處理中有不止一次的目標檢測,或者在單視處理中目標檢測與另一類不同目標發生相關,相關處理得出的距離可能并非是真實距離,此所謂距離幻影現象(如圖中圓圈中)。通常使用附加的準則來排除距離幻影,如選擇M/N 比值最高的相關距離(其中,M 為檢測報告次數,N 為PRF 重數),選擇M 個檢測中方差最小的檢測判決等。但此類算法實現較為復雜,因此,采用一組距離不模糊的低重頻PRF 和3 組距離模糊的中重頻PRF 探測目標,相關處理運算量變的簡單,如圖5 所示。

圖5 低重頻PRF 和中重頻PRF 配合解模糊示意圖
5 試驗驗證
為了驗證跟蹤波束設計對搜索雷達特定目標探測性能的提升,將該搜索雷達按照本文設計進行改進,增加跟蹤模式。該雷達在對S200 靶機繞飛試驗中,靶機飛出段采用常規搜索模式,進入段改用參差MPRI 波束的跟蹤模式。
選取檢飛過程中同一強雜波點在不同重頻下的多普勒頻譜,由圖6 可知,通過將重頻的增加,能夠將雜波的基底電平降低7 dB 左右,同樣提高目標的發現概率。
檢飛過程中檢測情況如圖7 所示(圖為雷達實際PPI 畫面截屏),圖中白色點表示雷達未檢測到目標情況下數據處理外推點,常規搜索模式下,雷達多次出現“丟點”情況;在跟蹤模式下,雷達只在盲區附近出現一次“丟點”,由對比知,采用參差MPRI波束的跟蹤模式使雷達特定目標的檢測概率大大提高。對S200 靶機,戰斗機等多機型、多架次檢飛試驗數據進行統計,跟蹤模式下雷達檢測概率能夠有效提升,測試可達98%以上,原狀態下檢飛時跟蹤上述類型目標,檢測概率均值為81%。圖7 為一次S200 靶機實際飛行過程雷達界面的截屏圖。靶機背離過程中,采用原工作模式跟蹤,全程丟檢測一次點跡7 個;靶機由背離陣地調轉航向變為進入陣地狀態后,采用中重復頻率的跟蹤模式跟蹤該目標,進入全程只丟失檢測一次點跡1 個;而靶機近入時的RCS 較背離時小,會造成目標檢測概率下降,但通過跟蹤模式的使用,檢測概率卻有明顯的提升。
6 精度分析
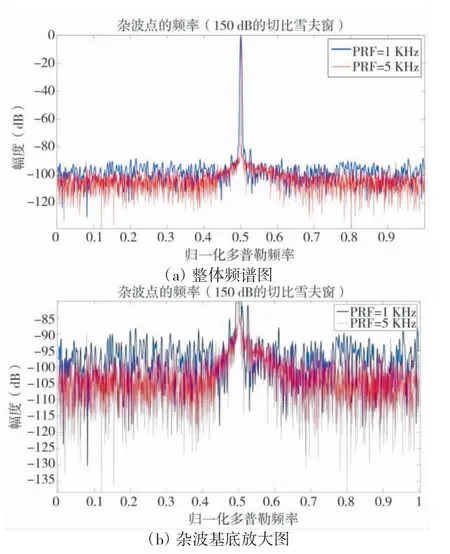
圖6 強雜波點在不同重頻下的頻譜
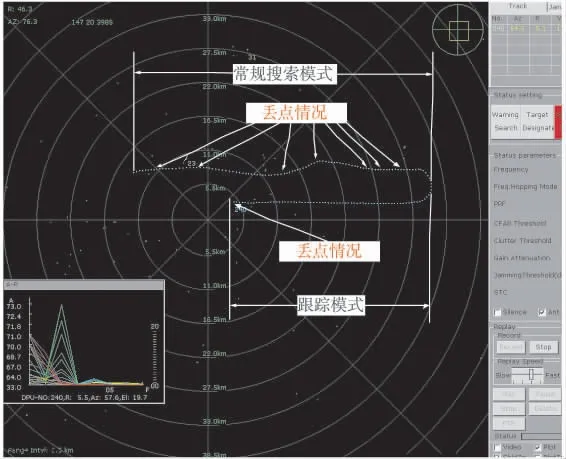
圖7 雷達對靶機檢測情況截圖
對使用中重復頻率的跟蹤模式探測S200 型靶機的實際檢飛數據進行精度分析。由于該靶機提供的真值數據中包括GPS 位置信息(LongTgt/LatitudeTgt/HightTgt)、GPS 速度(VgpsTgt)、航向(YawTgt)和俯仰角(PitchTgt)等信息,通過坐標轉換將目標的GPS 位置轉換為雷達坐標系的XYZ 值。然后,將目標的速度在大地直角坐標系中進行分解:

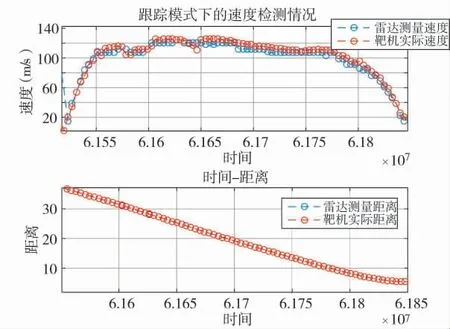
圖8 跟蹤模式下目標速度對比(機動目標)
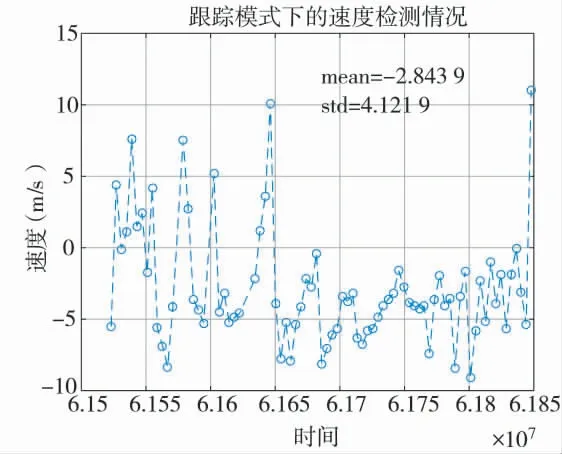
圖9 跟蹤模式下測速精度分析(機動目標)
從圖9 可以看出,目標徑向速度從20 m/s 到100 m/s 的變化(機動轉彎造成徑向速度的變化),中重復頻率跟蹤模式下測速的均方根值小于5 m/s。原模式下,由于使用低重頻無法進行速度解模糊,因此,信號處理上報的點跡無速度信息。中重復頻率的跟蹤模式下給出點跡的速度信息,在數據處理中使用速度信息設計關聯波門。從圖中可以看出,中重復頻率的跟蹤模式下目標的測速精度較高,跟蹤波門可以設計的很小,從而提高航跡關聯的準確性,提升航跡質量[9]。
7 結論
經過多次檢飛驗證及結果分析可知,基于參差中重頻脈組的跟蹤波束設計,能夠有效擴展雷達速度清晰區,改善因速度模糊導致的檢測性能下降,提高雷達對特定目標的檢測概率,并實現特定目標的高精度測速,提高目標的航跡質量,更好地滿足武器系統對特定目標穩定跟蹤的要求。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
