彈用電動舵機加載性能測試系統設計*
2021-06-26 03:58:50譚亞麗
火力與指揮控制 2021年5期
譚亞麗,宋 科,郭 霞
(1.西安交通大學城市學院電氣與信息工程系,西安 710018;2.西安航空學院電子工程學院,西安 710077)
0 引言
舵機是導彈控制系統的執行機構,其功能是依據控制系統的控制信號,移動調節機構以產生對分系統的操縱力矩,控制導彈機動飛行。舵機的性能直接影響導彈總體性能指標,決定著導彈飛行的動態品質與制導精度,因此,對舵機的功能和性能指標考核非常重要[1-2]。
目前,舵機測試大多采用人工測試的方法,由于舵機參數繁多、信號復雜,該方法工作量大、過程繁鎖,特別是主觀因素等會對測量結果產生較大誤差,生產效率低下[3]。
不同舵機由于控制器不同,參數測量標準也不盡相同,通常采用針對性設計的方式,不同舵機采用不同舵機性能測試系統,通用性較差,造成了資源浪費[4]。
本文設計了一套便攜式舵機加載性能測試系統,它是一套自動化綜合測試系統,能通過直流程控電源為舵機提供工作電源,通過信號發生單元模擬彈載計算機控制指令,通過扭力桿模擬舵機飛行過程中的鉸鏈力矩,采用當今先進的虛擬儀器技術編寫程序對信號采集模塊采集的舵機控制信號、反饋信號及加載裝置的力矩信號進行數據的讀取、顯示、存儲及處理。完成對多種舵機的功能和性能指標的全面測試,確保舵機各項指標滿足設計要求,為導彈研制和生產提供有力保障。
1 系統總體方案
1.1 系統測試要求
所設計的舵機加載性能測試系統要求能實現如下功能:
1)能夠提供舵機正常工作所需的環境,包括供電電源、信號源等;
2)能夠對舵機輸入輸出信號進行采集、存儲、分析、顯示、打印;
3)具有良好的人機界面,可方便地設置舵機工作模式,顯示舵機的工作狀態;
4)具有手動和自動兩種測試方式,手動方式可以任意選擇測試項目,自動方式可以一次完成所有測試項目;
5)具備測試結果報表編制、數據分析判定及數據管理功能;
6)具備上電自檢及保護功能,具備上電、斷電時序控制功能;
7)具有計量檢測接口,可通過相應接口對測試系統進行計量檢驗;
8)具有長時間工作的能力,連續工作時間不小于10 h。
1.2 系統方案設計
依據測試系統的技術要求,考慮實際系統的可靠性、可維護性、易操作性、可擴展性及數據顯示的清晰直觀性,同時考慮所研制系統布局的合理性與模塊化[5-6],所設計的測試系統主要由測試臺和加載裝置組成。
測試臺包括控制計算機、顯控單元、電源分配器、任意波形發生器模塊、信號采集模塊、程控直流電源、信號調理模塊、電氣接口轉換箱、轉接電纜、測試電纜以及測試軟件;加載裝置包括加載臺和加載控制單元。舵機加載性能測試系統結構框圖如圖1 所示。
控制計算機是整個舵機性能測試系統的控制中心,完成供電電源、各功能模塊的控制,完成數據讀取、顯示、存儲及處理。電源分配器控制測試系統的上電和斷電,為測試系統內部設備提供交流電。任意波形發生器模塊為舵機提供工作所需要的控制信號。信號采集模塊完成舵機控制信號、反饋信號及加載裝置的力矩信號的采集。程控直流電源為舵機提供三路直流工作電源。信號調理模塊對控制信號及反饋信號進行隔離,防止測試系統與舵機之間產生串擾。舵機工作電壓電流的監測通過程控直流電源回讀功能實現。電氣接口轉換箱通過轉接電纜和測試電纜分別連接測試系統和舵機,用于信號接口轉換、信號監測、計量檢測。加載裝置為舵機提供扭矩,完成舵機的負載能力測試。
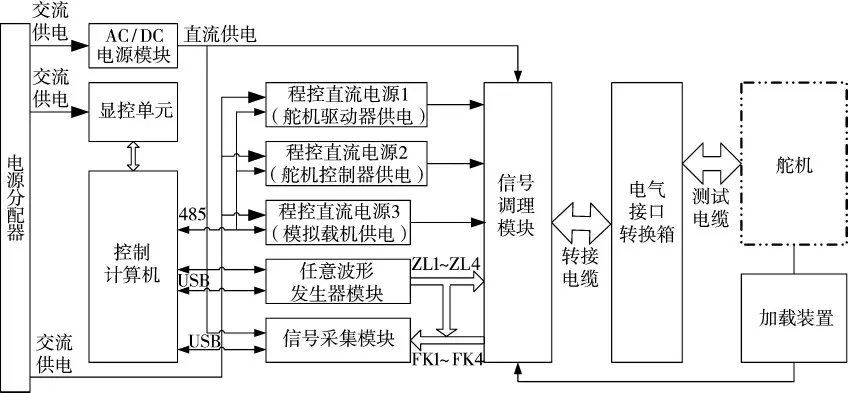
圖1 舵機加載性能測試系統結構框圖
2 系統硬件設計
2.1 加載裝置設計
2.1.1 加載裝置結構設計
舵機加載裝置采用扭桿加載方式實現,為舵機加載扭轉力矩并通過扭矩傳感器測出扭轉力矩值[7]。扭桿加載裝置主要由底板、支架、扭矩傳感器、彈簧鋼絲、轉接頭、聯軸器及限位銷等部分組成。加載裝置結構示意如圖2 所示。

圖2 舵機加載裝置結構示意圖
其工作原理為:用螺釘將舵機安裝在支架3上,用聯軸器抱緊舵機的輸出軸使其和彈簧鋼絲聯接在一起。當舵機工作時,帶動彈簧鋼絲發生扭轉彈性變形,彈簧鋼絲會產生一扭矩與舵機輸出力矩相平衡。限位銷用來限制彈簧鋼絲的相對扭轉轉角,以防加載力矩超過系統量程造成彈簧鋼絲和扭矩傳感器發生破壞。支架2 中的軸承用以防止彈簧鋼絲發生懸垂且盡可能減少支架對鋼絲的摩擦,以免對扭矩傳感器的測量結果產生干擾。
2.1.2 扭力桿設計及校核計算
1)設計參數
①舵機加載的基本要求:±18°/10 N·m。
②動態響應頻率:10 Hz~25 Hz。
③扭力桿粗胚材料:30CrNiMoVA。
④扭力桿有效長度:235 mm,桿有效截面尺寸:5 mm×5 mm。
2)剛度校核計算
測試系統對該扭桿加載裝置的要求為:在最大輸入扭矩為15 N·m 時,對應轉角為18°,以此作為設計輸入,對該裝置的承力件進行校核計算。扭矩傳感器的量程為18 N·m,聯軸器的額定載荷為20 N·m,能滿足最大輸入力矩15N·m 的要求。
所選彈簧鋼絲的直徑D 為5 mm,長度為235 mm,其許用切應力約為460 Mpa,下面對彈簧鋼絲進行校核計算[8-9]。
彈簧鋼絲的截面二次極矩為:
目前,國內外已有大量文獻研究了在單一因素作用下的混凝土的耐久性,而在混凝土實際服役環境中,大多是多種因素共同影響混凝土的耐久性。因此,硫酸鹽侵蝕與凍融循環耦合作用下的混凝土的耐久性是目前急需研究的科學問題。本文對單一因素和多因素作用下混凝土的耐久性進行綜合考慮,對比分析混凝土的耐久性,為實際工程的設計提供依據,以期延長混凝土在極端服役環境下的服役壽命。

彈簧鋼絲的扭轉截面系數為:

當輸入轉矩T=15 N·m 時,彈簧鋼絲橫截面上的最大切應力為:

當輸入轉矩T=15 N·m 時,彈簧鋼絲的相對扭轉轉角為:

同時考慮扭矩傳感器、聯軸器、轉接頭等的微量扭轉,該裝置能滿足在最大輸入扭矩為15 N·m時,對應轉角為18°的設計要求。對前述所選試樣進行扭轉測試,判斷其是否滿足舵機加載的基本要求,如果不滿足要求,對所選參數進行微調,必要時引入熱處理工藝對其進行調整。
2.2 系統測試臺設計
2.2.1 控制計算機
為了使測試臺體積小、重量輕,控制計算機選用嵌入式計算機。該計算機已經成功應用于某研究所地檢設備,功能和性能穩定可靠。顯控單元選用一體化機,提供人機交互接口,便于工作人員操作、觀察、記錄數據。
2.2.2 任意波形發生器模塊
任意波形發生器模塊用來提供舵機控制信號,選用體積小、重量輕的USB 接口任意波形發生器模塊。
2.2.3 信號采集模塊
同步采集模塊選用體積小、重量輕的USB 接口采集模塊USB-4000,噪聲低、精度高,每個模擬輸入通道具有獨立的AD 轉換單元,在采集信號時保證了每個通道所采集的數據在時間上是同步的[10]。
信號調理主要將舵機與測試系統之間的信號即任意波形發生器的輸出信號、ZL1~ZL4、FK1~FK4、扭力等進行隔離處理,隔離電路選用TI的精密隔離放大器ISO122 作為信號隔離的核心器件,它是一種電容耦合精密隔離放大器,其頻帶寬、增益精度高、線性度好,設計、安裝使用簡便,價格低廉,在過程控制領域應用廣泛[11-12]。其電路原理如下頁圖3 所示。

圖3 信號調理電路圖
其中:1)在隔離器的輸出端再經過一個二階低通濾波電路,對隔離器的高頻調制噪聲進行濾波處理,以抑制信號上噪聲干擾。2)信號調理電路在隔離前后均需要雙路的隔離電源,技術要求輸出和采集信號范圍是±10 V,所以調理電路選用±15 供電。3)所選用的ISO122 可滿足測試系統中信號隔離要求。信號跟隨和信號濾波用的運放選用TI 的高精度低噪聲運算放大器OPA4192,支持±2.5 V~±18 V的寬供電范圍,低輸入偏置電流、低失調電壓以及8 MHz 的增益帶寬積,在信號精度和帶寬等方面均可滿足測試系統的信號調理需求[13]。
2.2.4 程控直流電源模塊
根據測試需要選用3 種程控直流電源,分別為舵機驅動器、舵機控制器及模擬載機供電。程控電源具有電壓電流回讀功能,可實時監測顯示各供電回路的電壓和電流。
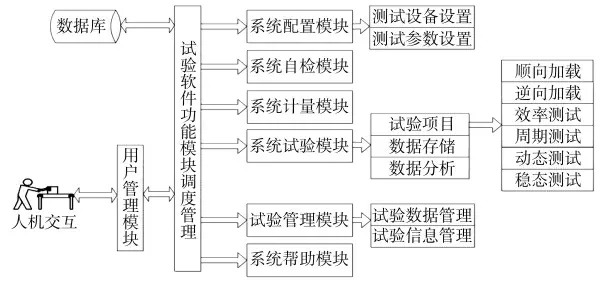
圖4 測試系統軟件組成及功能分工
3 系統軟件設計
軟件開發平臺在主體框架方面,選用在自動化測試設備中廣泛使用的虛擬儀器開發平臺Visu alStudio,該平臺提供了儀器常用的軟面板,功能強大的采集、處理、分析和表達工具,提供了和底層硬件的無縫鏈接,這些底層功能函數規范性好,都經過反復的測試和使用,有非常良好的易用性和可靠性[14-15]。
3.1 測試軟件組成
測試系統軟件包括:操作系統、硬件驅動模塊和舵機性能測試系統軟件。
測試系統軟件的配置信息與數據信息通過數據文件與數據庫進行存儲,并提供訪問數據文件與數據庫的接口;同時測試系統軟件通過控制儀器設備驅動,實現不同測試對象對應測試項的測試流程。
本測試軟件分為:系統配置模塊、系統自檢模塊、系統計量模塊、測試試驗模塊、試驗管理模塊、用戶管理模塊和系統幫助模塊。各模塊的關系及功能分工如圖4 所示。
1)系統配置模塊
系統配置模塊能夠確定軟件控制測試設備時,設備對應的資源標識符,進而實現對設備的程控。
數據文件針對測試設備的數據格式為:資源編號、資源類型、資源標識符和廠商信息;針對測試數據的數據格式為:被測對象的型號、通道、測試項、測試數據、測試判據。
測試人員根據需要選擇或輸入以下內容:產品編號、產品批號、日期、生產單位、測試人員、檢驗人員、記錄人員、測試狀態、交付、驗收、檢測模式。
2)系統自檢模塊
系統自檢模塊完成測試系統中程控直流電源、數據采集模塊和任意波形發生器模塊的自檢,并給出自檢結果。
系統開始每次測試任務前可對各硬件模塊進行自檢,以保證各模塊處于正常狀態,避免對系統造成損害。
系統自檢有上電自檢和用戶手動自檢兩種方式。通過自檢界面對自檢過程進行顯示,當自檢不合格時,應給出不合格列表供用戶參考,在上電自檢過程中有不合格項時,不得進入測試流程。自檢測試主要包括電源電壓、電流、信號輸出等。
3)系統計量模塊
系統計量模塊配合標準儀器完成程控直流電源、數據采集模塊和任意波形發生器模塊的計量。
4)測試實驗模塊
該模塊主要包括數據判斷和數據分析。數據判斷要能夠對測試數據進行判斷,給出判斷結果。數據分析要對前期測試產生的數據進行處理,包括可回放參數列表、圖形顯示、可進行多條桑菊曲線對比顯示,包括測試采集數據的回放。
3.2 測試軟件工作流程
舵機加載性能測試臺軟件啟動后,按照登錄-上電自檢-主控程序等流程執行,具體的工作執行流程如圖5 所示。
4 系統運行及測試結果
本系統經過初步調試后達到了預期要求,并對舵機性能的各個指標進行了測試。測試時操作順序為:
測試上電時序:舵機控制電源先上電,判斷上電無誤后,舵機驅動電源再上電。
測試下電時序:舵機驅動電源先下電,判斷下電無誤后,舵機控制電源再下電。
研制成功的便攜式舵機測試系統對某型號導彈舵機進行了測試。測試項目主要包括舵機電源特性、時域響應以及頻域特性測試。根據鑒定試驗大綱,測試系統模擬飛控計算機發出標準指令,同步采集相應的舵機的位置反饋,經自動計算舵偏轉角、轉速、延遲時間、位置超調以及穩態誤差。舵偏轉角速度測試結果如圖6 所示。

圖5 測試軟件工作主流程圖
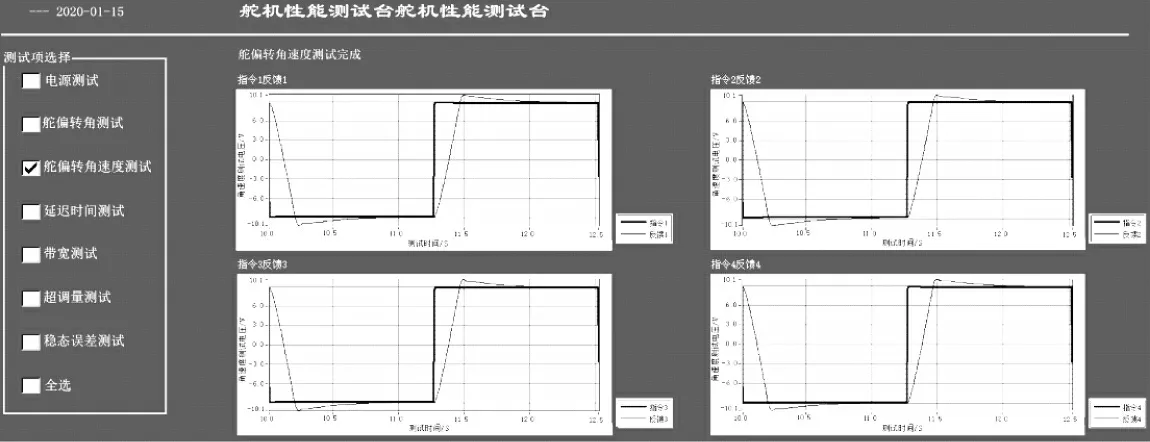
圖6 舵偏轉角速度測試結果
舵機階躍響應下,多次測量所得的舵偏轉角速度相對誤差小于1.2%,完全滿足舵機測試的重復精度要求。測試結果采用曲線實時顯示,對數據的自動判讀以及圖表的自動保存。與傳統測量方法相比,杜絕了人工判讀下測試人員主觀因素的影響。統交付用戶試用,經過技術鑒定試驗,最終的產品狀態和軟件版本都滿足用戶的需求,各項性能指標都達到了設計要求。
5 結論
本文從總體、硬件、軟件、結構以及6 性5 個方面對舵機加載性能測試系統設計的各個技術細節進行了論述,能夠滿足多型舵機的測試需要;具有良好的可靠性、維修性、安全性及環境適應性,體積小、重量輕,方便攜帶和搬運;舵機加載性能測試系
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
