H∞濾波γ 因子對艦載慣導自對準的影響研究
2021-06-26 03:58:52王勇軍徐景碩
火力與指揮控制 2021年5期
關鍵詞:系統
王勇軍,徐景碩
(1.濟南大學泉城學院,山東 蓬萊,265600;2.海軍航空大學青島校區,山東 青島 266041)
0 引言
慣導系統自對準技術[1-4]由于其獨特的自主性而備受廣大學者研究關注。自對準技術分粗對準和精對準兩個階段。粗對準將姿態失準角降低到小角度范圍,精對準通過濾波技術完成對失準角的精確估計。因此,艦載慣導自主精對準是艦載設備性能發揮的關鍵環節。艦載環境下無論是系泊還是航行狀態,艦體會受到風浪、顫振等因素干擾,加之受系統建模誤差等不確定性因素影響,使得艦載慣導系統自對準濾波方程中有較大的未知干擾,導致常規卡爾曼濾波器性能降低或發散的問題。H∞濾波具備良好的魯棒性和其在最壞干擾情況下的可用性而受到廣泛應用[5-7]。它將噪聲看作能量有限的隨機信號,通過選取常數γ 來構建一個從干擾輸入到濾波誤差輸出的H∞范數最小化的濾波器,有效抑制外界未知噪聲的干擾,實現對估計量的較好估計。針對艦載環境慣導系統對準問題,文獻[8]引入了H∞濾波技術,解決了大幅晃動條件下常規濾波算法無法對準的弊端。但該文獻未對γ 因子的取值問題展開研究。實際上,H∞濾波算法中γ 因子的選取問題,直接關系到濾波算法的優劣和對準性能的高低。基于此,本文在該文獻的基礎上梳理艦載慣導精對準思路流程,并就系泊和等速航行下濾波參數的選取問題和對對準性能的影響進行研究,旨在為艦載條件下慣導系統對準算法濾波參數的選擇提供參考和依據。
1 艦載慣導精對準思路框架


通過基于重力加速度信息的慣性系分解[5],構造定姿雙矢量,利用TRIAD 等算法[4]可實現艦載慣導系統的粗對準,在粗對準結束時刻,獲得具有粗略估計值的矩陣,使得計算i'0 系相對真正i0系間的姿態失準角φi0達到小角度范圍,需要運用濾波算法完成對失準角的精確估計。考慮到對準狀態方程中量測噪聲的不確定性,擬采用魯棒濾波算法。姿態失準角的估計過程就是慣導系統的精對準過程。待失準角的估計完成后,按照公式即可實現慣導系統整個初始對準過程。具體的思路框架如圖1 所示。

圖1 精對準思路流程
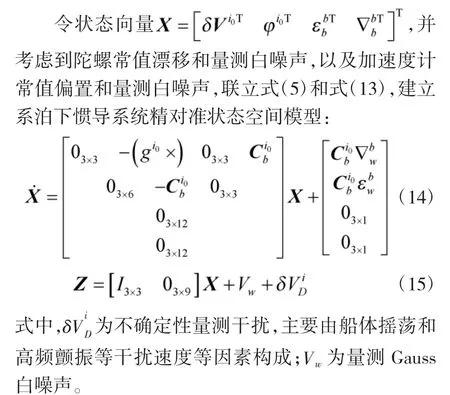
2 兩種情形對準狀態模型建立
2.1 系泊下精對準狀態模型
考慮到陀螺漂移εb,實際的矩陣的微分方程為:

定義

而

將式(3)~式(4)兩邊求導,聯立式(2)并略去二階小量,整理得

式(5)即為姿態誤差方程。

式(13)即為量測方程。
2.2 等速航行下精對準狀態模型
艦船等速航行下慣導系統的姿態誤差方程同式(5)。
由于艦船等速直線航行,使得慣導系統加速度計輸出較系泊下加速度計輸出多了有害加速度及其誤差,參照式(6),從而有

式中

為等速航行下載體慣導系統等效干擾加速度。將式(16)兩邊積分,移項,整理得:

式中

其余參數定義同式(8)~式(11)。
定義

從而等速航行下慣導系統狀態空間模型中系統方程同式(14),量測方程見式(20)。
3 基于H∞的慣導精對準算法
由于H∞濾波算法結構的特殊性,最優解只適用于某些特殊問題,一般只能尋求H∞次優解。H∞次優濾波算法[10]為:
從式(21)與卡爾曼濾波算法比較可以分析得知,H∞濾波通過調節因子γ 和矩陣Lk,實現對濾波增益和估計均方誤差權重的調節,加大對新鮮量測量的權重,進而提高系統穩健度和精度。當γ 越大,就越接近卡爾曼濾波;當γ 越小,H∞濾波代價函數的界越低,濾波精度越低;當γ 趨近于∞時,濾波代價函數的無界性,使得在量測噪聲和系統噪聲未知的情況下無法保證濾波效果。
針對艦載環境下,慣導系統自對準濾波方程中有較大的未知干擾,引入濾波,算法如式(21)。通過試驗,尋找合適調節因子,以實現對姿態誤差角的較好估計。為了研究調諧因子γ 對艦載慣導精對準性能的影響,分系泊和等速航行兩種條件,對γ 取多組值進行試驗。
4 仿真實驗驗證
4.1 仿真條件設置
IMU 參數、干擾線速度模型和典型海況下艦載搖擺運動模型設置均同文獻[8]。
平靜海況、中等海況和惡劣海況3 種情形下艦載搖擺模型設置同文獻[9]。
對γ 的每次取值,均進行20 次Monte-Carlo 仿真,然后對各誤差量取平均值后繪制仿真曲線。
4.2 系泊下γ 因子對對準性能的影響
列舉γ 具有代表性的不同值(γ=0.999 7,0.999 8,0.999 9,1,5,15,36,37,100,5 000,500 000)時艦載慣導精對準性能的變化情況,仿真結果如圖2~圖11 所示。
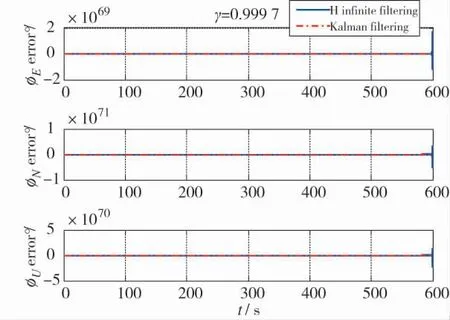
圖2 γ=0.999 7 的失準角誤差

圖3 γ=0.999 8 的失準角誤差
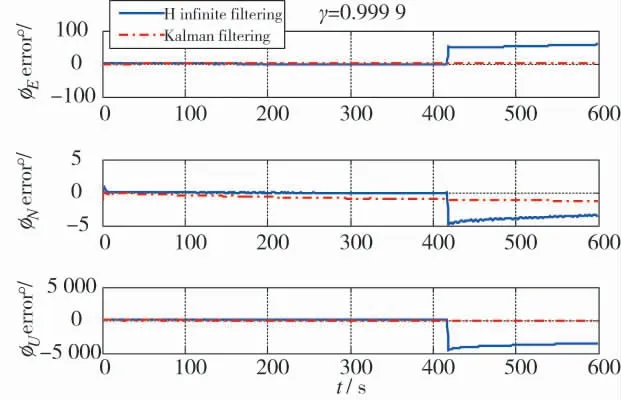
圖4 γ=0.999 9 的失準角誤差

圖5 γ=1 的失準角誤差
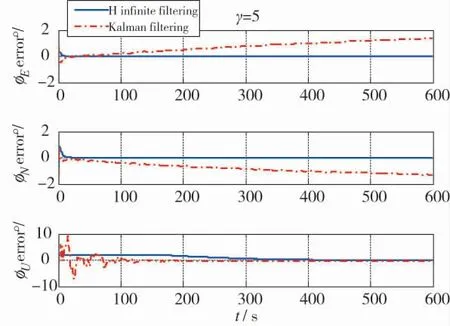
圖6 γ=5 的失準角誤差

圖7 γ=15 的失準角誤差

圖8 γ=36 的失準角誤差
從圖2~圖4 中可以看出,就系泊條件下艦載慣導系統而言,γ=0.999 7 是H∞濾波是否有效的臨界點。當γ≤0.999 7 時,H∞濾波器無法進行運算;當0.999 7<γ<1 時,H∞濾波器可以進行運算,但因估計精度太低無法采用。

圖10 γ=100 的失準角誤差

圖11 γ=5 000 的失準角誤差
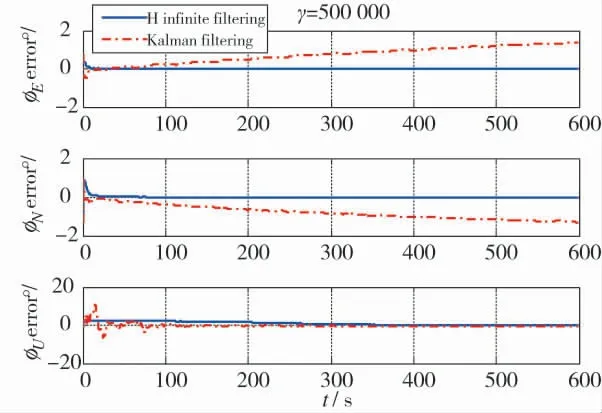
圖12 γ=500 000 的失準角誤差
從圖5~圖12 中可以看出,γ≥1 時,H∞濾波器可以進行有效運算,100 s 時時間水平姿態失準角誤差達到穩態,精度達到28"。但方位失準角誤差收斂較慢,下面從圖5~圖12 中方位失準角誤差隨時間的變化情況匯總至表1 所示。
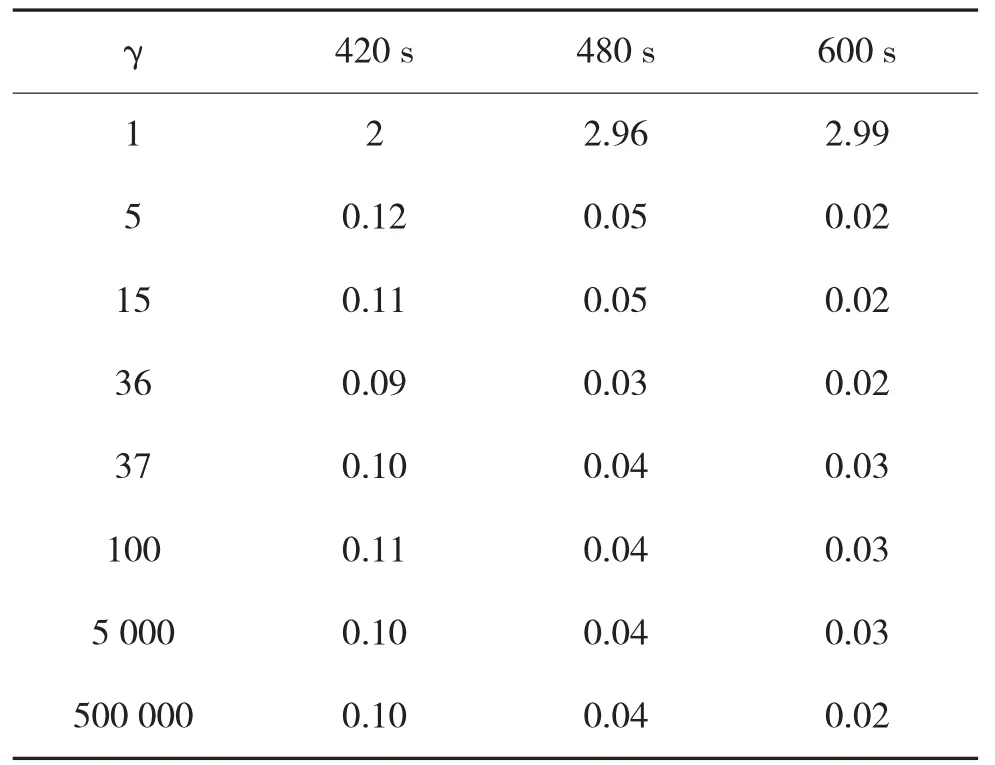
表1 系泊下γ 變化時的方位失準角誤差(°)
從表1 可以看出,420 s 時方位失準角估計誤差達到穩態。系泊條件下艦載慣導對準中魯棒濾波調節因子的最優值為36,估計精度6'。
4.3 等速航行下γ 因子對對準性能的影響
列舉代表性γ 值(γ=0.999 7,0.999 8,0.999 9,1,5,30,31,100,5 000,500 000)時艦載慣導精對準性能的變化情況,仿真結果如圖13~圖22 所示。
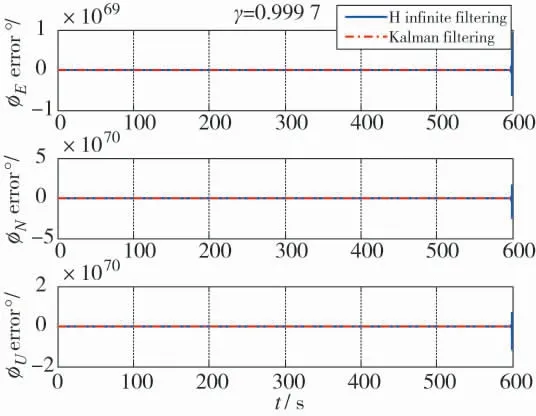
圖13 γ=0.999 7 的失準角誤差
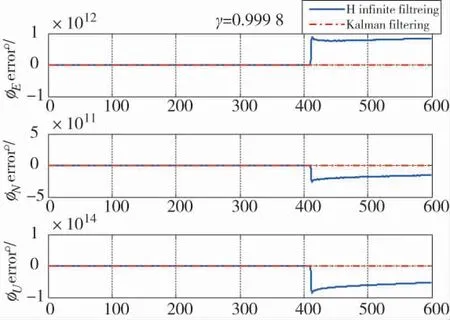
圖14 γ=0.999 8 的失準角誤差

圖15 γ=0.999 9 的失準角誤差

圖16 γ=1 的失準角誤差

圖17 γ=5 的失準角誤差
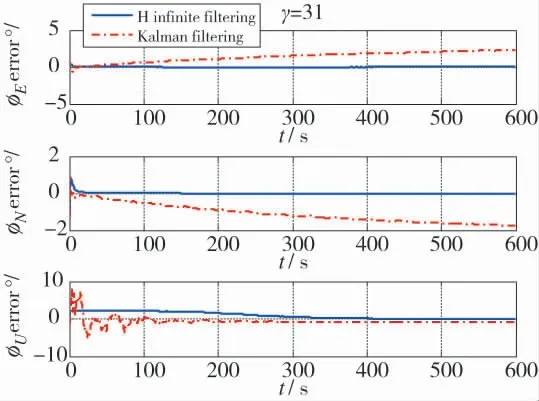
圖18 γ=31 的失準角誤差

圖19 γ=32 的失準角誤差

圖20 γ=100 的失準角誤差

圖21 γ=5 000 的失準角誤差
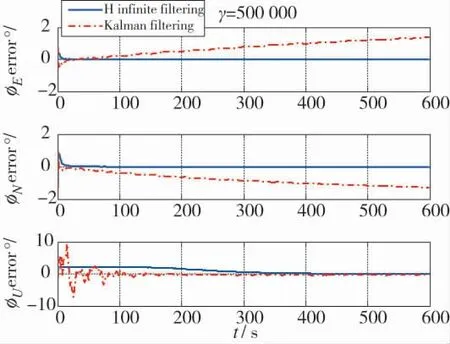
圖22 γ=500 000 的失準角誤差
從圖13~圖15 中可以看出,就等速航行條件下艦載慣導系統而言,γ=0.999 7 是H∞濾波是否有效的臨界點。當γ≤0.999 7 時,H∞濾波器無法進行運算;當0.999 7<γ<1 時,H∞濾波器可以進行運算,但因估計精度太低無法采用。這與系泊條件下調節因子的臨界點一致。
從圖16~圖22 中可以看出,γ≥1 時,H∞濾波器可以進行有效運算,100 s 時可使水平失準角誤差達到穩態,精度達到25"。但方位失準角誤差收斂較慢,把圖中方位失準角誤差隨時間的變化情況匯總至表2 所示。
從表2 中可以看出,420 s 時方位失準角估計誤差達到穩態。系泊條件下艦載慣導對準中魯棒濾波調節因子的最優值為31,估計精度6'。
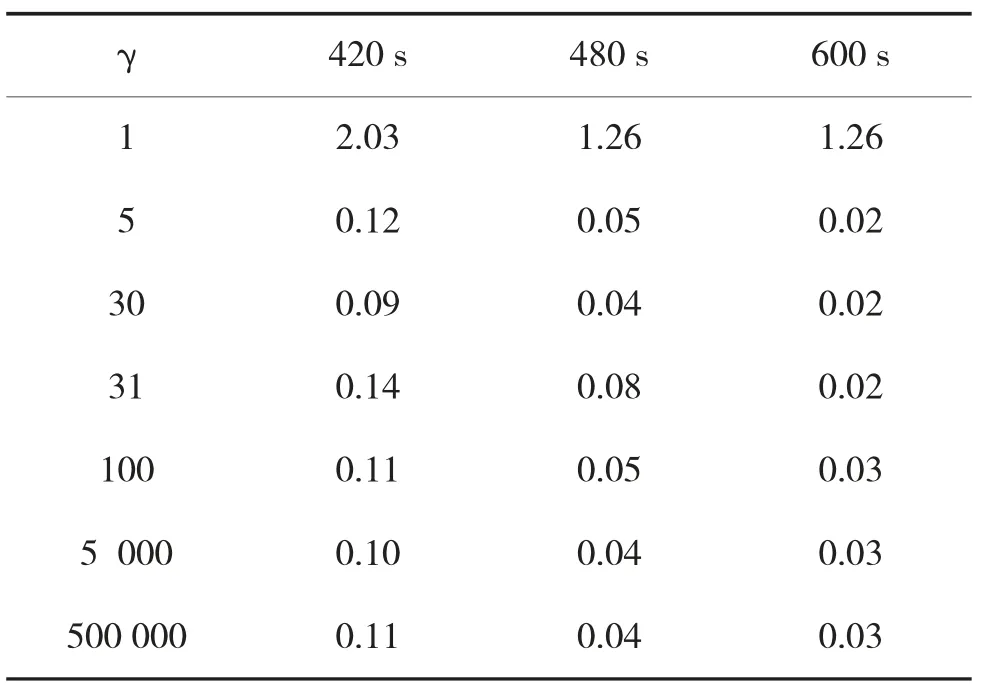
表2 等速航行下γ 變化時的方位失準角誤差(°)
4.4 γ 因子恒定時不同海況對對準性能的影響
當γ 因子恒定時,不妨設γ=15,以系泊條件下平靜海況、中等海況和惡劣海況等3 種海況為例,海況參數按照3.1 節設置,仿真結果如圖23~圖25所示。

圖23 γ 恒定時惡劣海況下的失準角誤差
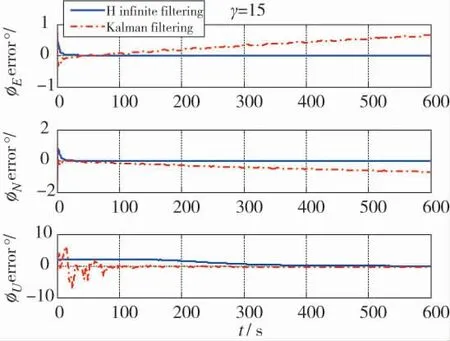
圖24 γ 恒定時中等海況下的失準角誤差

圖25 γ 恒定時平靜海況下的失準角誤差
從圖23~圖25 中可以得出,平靜、中等、惡劣3 種海況下水平失準角和方位失準角的估計誤差基本相當,誤差約為0.005°。這說明當γ 因子恒定時,海況的不同對艦載慣導系統對準精度的影響為角秒級,可以忽略。
4.5 小結
從4.2~4.4 節中可以得出如下結論:
1)無論是系泊條件還是等速航行條件下,采用H∞魯棒濾波器進行艦載慣導對準時,調節因子γ=0.999 7 均是H∞濾波是否有效的臨界點。當γ≤0.999 7 時,H∞濾波器無法實現精對準。所以當γ=0.999 7 時,濾波器性能基本接近H∞最優濾波。
2)調節因子γ≥1 時,標志著H∞濾波器可以發揮作用,γ 值較小時,濾波器精度較低。隨著γ 取值的不斷加大,H∞濾波器的平均性能越來越好,原因在于此時的濾波器對系統模型的變化比較敏感。當γ 值達到一定數值后,再增加γ 數值時,濾波器性能沒有較大的改變,原因在于此時濾波器性能已經達到次優,即干擾輸入到估計誤差的閉環傳遞函數的H∞范數已經達到最小。
3)當調節因子恒定時,海況的變化對艦載慣導系統對準性能的影響較小,可以忽略。
4)在實際應用中,為了保證濾波效果,γ 值必須大于臨界值。γ 是調節系統魯棒性和濾波精度的一個尺子,γ 越小,魯棒性越好,但濾波精度越低。因此,選取γ 值時需要兩者兼顧。
5 結論
針對艦載環境下不確定外界干擾,引入H∞濾波可以有效克服外界干擾,保證系統穩定性和較好的濾波精度。仿真試驗表明,艦載環境下,無論是系泊條件和等速航行條件,采用H∞濾波器實現艦載慣導系統精對準時,決定濾波器有效性的調節因子γ 的臨界值是一致的。γ 是衡量系統魯棒性和穩定性的調節閥,γ 越小,系統穩定性越好,但濾波精度越低,γ 逐漸增大,濾波精度越高,但增加到一定值時,濾波精度不增反降。實際應用中,γ 值的選擇需要權衡兩者,相互兼顧。當γ 因子恒定時,海況的不同對對準性能的影響很小,可以忽略。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
