飛機前輪隨滑行速度限偏的分析研究
2021-06-28 02:58:40唐瑞琳
航空工程進展 2021年3期
關鍵詞:飛機
唐瑞琳
(航空工業(yè)第一飛機設計研究院飛控系統(tǒng)設計研究所,西安710089)
0 引 言
飛機起飛降落進行滑跑時,雖然可以使用差動推力和差動剎車糾正飛機滑跑軌跡[1],但這種方式會加大起飛降落滑跑距離,滑跑糾偏通常采用偏轉(zhuǎn)前輪的方式。隨著滑跑速度的逐漸增大,前輪偏轉(zhuǎn)過大會引發(fā)飛機側(cè)翻,從而導致飛機損毀。為了避免滑跑時側(cè)翻現(xiàn)象的發(fā)生,通常會對前輪的偏轉(zhuǎn)極限角度隨速度變化進行限制[2],速度越大對前輪偏轉(zhuǎn)角度限制越大,前輪可偏轉(zhuǎn)的角度也就越小。但并不是對前輪偏轉(zhuǎn)極限角度限制越大越有利于飛機滑跑安全,對前輪偏轉(zhuǎn)限制過大會降低飛機的滑跑糾偏能力,糾偏能力的降低有可能會致使飛機在起飛降落滑跑時沖出跑道[3],因此合理地隨速度變化限制前輪偏度可避免側(cè)翻的同時最大保留飛機的滑跑糾偏能力。
國內(nèi)外通常采用經(jīng)驗或者參考同類型飛機確定前輪隨速度變化的限偏,理論研究相對較少。王孝英等[4]考慮了飛機在滑跑過程起落架受到的支反力和摩擦力,但是忽略氣動效應;魯勝等[5]考慮了滑跑過程中所受的氣動力,但由于飛機側(cè)翻體現(xiàn)為相對側(cè)翻軸的外力矩,因此側(cè)翻分析中需同時考慮到氣動力和氣動力矩;郭杰等[6]、劉剛等[7]、苑強波等[8]通過建立起落架動力學模型在不同速度下進行前輪不同偏轉(zhuǎn)的數(shù)值仿真,得到臨界側(cè)翻時前輪偏轉(zhuǎn)角,但是由于起降滑跑階段飛機速度急劇變化,該方法不能反映出飛機加減速時的氣動特性(特別是螺旋槳飛機起飛的大滑流特性和著陸時的剎車特性),因此采用起落架動力學模型仿真的方法也不能準確地得到飛機起降時前輪隨速度的限偏;P.Sharpe[9]采用隨速度指數(shù)衰減的形式限制前輪偏轉(zhuǎn)范圍,但指數(shù)衰減的限制形式及其參數(shù)沒有具體的來源和方法。
本文通過研究飛機滑跑發(fā)生側(cè)翻的原理,分析重力、氣動、動力、剎車、前輪偏轉(zhuǎn)對飛機側(cè)翻的影響,計算起飛和降落狀態(tài)下每個速度的側(cè)翻臨界前輪偏度和中立位,得到前輪隨速度的限制范圍。
1 側(cè)翻分析
1.1 側(cè)翻原理
滑跑時,當前輪偏轉(zhuǎn)后,前輪輪軸地速方向很快改變并跟隨前輪滾動方向。當達到穩(wěn)態(tài)時,飛機轉(zhuǎn)彎中心如圖1所示,圖中O為轉(zhuǎn)彎中心,R為重心的轉(zhuǎn)彎半徑。由于轉(zhuǎn)彎時,飛機是向心運動,飛機重心處受到離心力;起降滑跑階段也是飛機加減速的階段,飛機軸向上有慣性力,同時飛機重心還受到重力作用。滑跑時飛機有速度,氣動參考點還受到氣動力和力矩(即升力、阻力和側(cè)力以及俯仰力矩、滾轉(zhuǎn)力矩和偏航力矩)作用。起飛時發(fā)動機有最大的拉力,著陸時剎車相對重心受到低頭力矩作用。

圖1 轉(zhuǎn)彎中心及轉(zhuǎn)彎半徑示意圖[10]Fig.1 Diagram of turn center and turn radius[10]
所有這些力相對于前輪和主輪觸地點連線(即圖1中的點劃線,以下簡稱為側(cè)翻軸)的力矩與合力矩在側(cè)翻軸方向的分量之和稱為側(cè)翻力矩,如果側(cè)翻力矩不導致任一主機輪脫離地面,則不會發(fā)生側(cè)翻,反之就會側(cè)翻。
1.2 側(cè)翻臨界狀態(tài)
根據(jù)側(cè)翻原理的分析,飛機滑跑時發(fā)生側(cè)翻主要是由于轉(zhuǎn)彎產(chǎn)生的離心力相對側(cè)翻軸的力矩過大,因此轉(zhuǎn)彎半徑越小、速度越大、重心高度越高越容易側(cè)翻。計算不同速度下導致飛機即將側(cè)翻(側(cè)翻臨界狀態(tài))的前輪偏度,可確定前輪隨速度變化的限偏。
在滑跑過程中,隨著飛機升力的增大,起落架的壓縮量逐漸減小,重心高度是逐漸增大的。但機場跑道實際不是完全平整的,滑跑過程中飛機可能被顛起來,這種情況下重心的高度也會增加,因此按照各速度下所有起落架剛接地且沒有壓縮行程并即將發(fā)生側(cè)翻認為是側(cè)翻臨界狀態(tài),取該狀態(tài)的起落架尺寸進行計算。
2 側(cè)翻軸的力矩
側(cè)翻臨界狀態(tài)時,飛機相對側(cè)翻軸合力矩為0,其中構(gòu)成側(cè)翻軸合力矩的分別有重力、氣動力和力矩、動力、剎車、離心力。在不同速度下,可根據(jù)合力矩為0的關系求出側(cè)翻臨界狀態(tài)的離心力,從而得到各速度下的前輪限偏。
定義機體構(gòu)造坐標系,以飛機鼻錐為原點,x軸沿機身軸線向后為正,y軸垂直于飛機對稱平面向右為正,z軸垂直于x-y平面向上為正,如圖2所示。

圖2 機體構(gòu)造坐標系示意圖Fig.2 Diagram of engine construction system
2.1 重 力
重力對于側(cè)翻軸而言,能提供一個抑制側(cè)翻的力矩。重心相對于側(cè)翻軸的力臂如圖3中的實線所示,可根據(jù)起落架尺寸先求得前起落架輪軸到主起落架輪軸與前起落架輪軸到重心之間的夾角τ,再根據(jù)重心相對前起落架的位置求得重力相對于側(cè)翻軸的力臂LG,如式(1)所示。

圖3 重心相對側(cè)翻軸力臂示意圖Fig.3 Diagram of gravity center arm relative to cartwheeler axis

式中:(xR,yR,zR)為右主起輪軸在緩沖器沒壓縮時的機體構(gòu)造坐標系坐標;(xN,yN,zN)為前起輪軸在緩沖器沒壓縮時的機體構(gòu)造坐標系坐標。
因此重力相對于側(cè)翻軸的力矩MG為

式中:m為起飛/降落質(zhì)量;g為重力加速度。
2.2 氣動力和力矩
氣動力包括升力、阻力和側(cè)力。其中升力提供促進側(cè)翻的力矩;阻力提供抑制側(cè)翻的力矩;側(cè)力對于同側(cè)側(cè)翻軸提供一個抑制側(cè)翻的力矩,而對異側(cè)提供促進側(cè)翻的力矩(理想轉(zhuǎn)彎中,側(cè)滑角都為0,但螺旋槳飛機由于滑流不對稱,側(cè)滑角為0時也有側(cè)力)。
升力相對于側(cè)翻軸的力臂L L如圖4的實線所示,求取方法與重力力臂一致,如式(3)所示。

圖4 升力相對側(cè)翻軸力臂示意圖Fig.4 Diagram of lift force arm relative to cartwheeler axis

阻力和側(cè)力相對側(cè)翻軸的力臂L D、L Y是氣動參考點距離地面的高度,即:

式中:RM為主起落架機輪半徑。
氣動力矩包括俯仰力矩、滾轉(zhuǎn)力矩、偏航力矩。其中正俯仰力矩(抬頭力矩)提供一個抑制側(cè)翻的力矩,反之亦然;正滾轉(zhuǎn)力矩對于右側(cè)翻軸提供一個促進側(cè)翻的力矩,對于左側(cè)翻軸提供一個抑制側(cè)翻的力矩,反之亦然;偏航力矩由于垂直于側(cè)翻軸,所以對于側(cè)翻不提供任何力矩,但其影響前輪的中立位。
俯仰力矩和滾轉(zhuǎn)力矩可根據(jù)在相應側(cè)翻軸方向的分量,將全機力矩轉(zhuǎn)換到相對側(cè)翻軸上。因此氣動力和力矩相對于側(cè)翻軸的總力矩Maero為

式中:Q為動壓;sref為參考面積;cref為參考弦長;bref為展長;CL、CD分別為升力系數(shù)和阻力系數(shù);CY、Cm、Cl為起飛/降落時的氣動系數(shù),即起飛時為滿油門(大拉力系數(shù))、降落時為小油門(小拉力系數(shù))。
2.3 動 力
動力相對側(cè)翻軸力矩示意圖如圖5所示。由于算例飛機的發(fā)動機位于機頭,因此提供一個促進側(cè)翻的力矩。
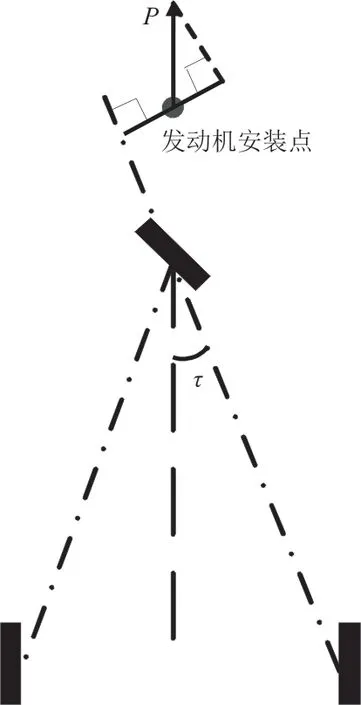
圖5 動力相對側(cè)翻軸力矩示意圖Fig.5 Diagram of power arm relative to cartwheeler axis
由于發(fā)動機的力不垂直于側(cè)翻軸,因此先根據(jù)起落架尺寸求取動力在垂直于側(cè)翻軸方向的分力,而力臂為發(fā)動機安裝點距離地面的高度,兩者乘積為動力相對于側(cè)翻軸的力矩M P。

式中:P為發(fā)動機拉力;(x P,y P,z P)為發(fā)動機安裝點在機體構(gòu)造坐標系的坐標。
2.4 剎 車
只在降落滑跑過程中考慮剎車對側(cè)翻軸的力矩。剎車時,機輪與地面的摩擦力增大,該摩擦力相對于重心產(chǎn)生低頭力矩,因此提供了一個促進側(cè)翻的力矩。輪胎正壓力為重力與升力的差,剎車形成的機輪與地面的摩擦力是正壓力與剎車摩擦系數(shù)的乘積,剎車力臂為重心距離地面的高度。將剎車力矩投影到側(cè)翻軸方向,即可得到剎車相對側(cè)翻軸的力矩MB。

式中:μB為剎車時的輪胎摩擦系數(shù)。
2.5 離心力
重心處的離心力相對轉(zhuǎn)彎外側(cè)的側(cè)翻軸提供了促進側(cè)翻的力矩。離心力相對側(cè)翻軸的力矩解算示意圖如圖6所示,重心處離心力方向與重心到轉(zhuǎn)彎中心(如圖6中的R所示)的方向一致,求取其相對側(cè)翻軸的力矩Mc可先將其分解成垂直于飛機軸向和飛機軸線兩個方向的力矩,然后進行疊加。

圖6 離心力相對側(cè)翻軸的力矩解算示意圖Fig.6 Diagram of centrifugal force arm relative to cartwheeler axis
離心力相對側(cè)翻軸的力矩Mc滿足以下關系式:
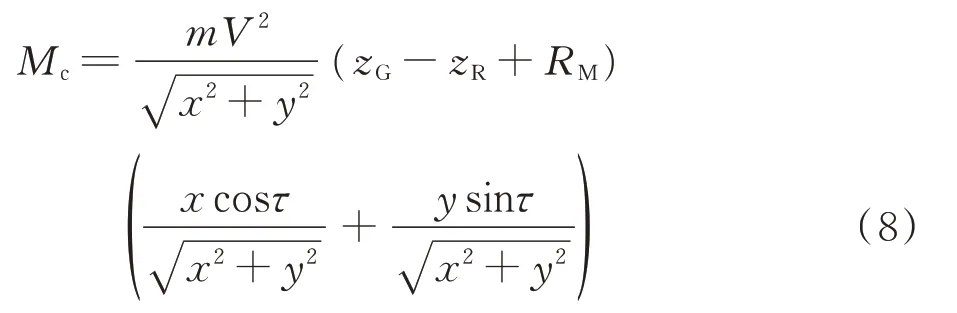
式中:

2.6 臨界轉(zhuǎn)彎半徑及臨界轉(zhuǎn)向偏度
由側(cè)翻臨界條件可以得到:

在各速度下,式(10)只有Mc中的x是未知量,為求得x,將式(10)改寫為下列形式:

當升力小于重力,且x有正實根解時,可得臨界轉(zhuǎn)彎半徑R。由一元二次方程通解可知,當

臨界轉(zhuǎn)彎半徑:

由此可得臨界轉(zhuǎn)向偏度δng:

3 前輪偏度與滾動偏度的關系
如果前起落架轉(zhuǎn)軸平行于機體構(gòu)造坐標系的z軸,則滾動偏度和前輪偏度相等,而飛機前起落架一般有前傾角,因此前輪偏度和滾動偏度大致相同,但不完全一致。
機輪只受摩擦力作用時,保持在機輪輪廓平面內(nèi)滾動,在機輪輪廓平面內(nèi)垂直于輪軸到機輪觸地點的向量在地面的投影就是機輪滾動方向,因此在求取前輪偏度與滾動偏度的關系前,需先求得前輪觸地點。
建立機輪構(gòu)造坐標系,以機輪軸心為原點,x軸在機輪對稱面內(nèi)平行于機體構(gòu)造系x-y面向后為正,z軸在機輪對稱面內(nèi)垂直機體構(gòu)造系x-y面向上為正,y軸垂直于輪胎對稱面向右為正,機輪輪廓可由極坐標方程表示,如圖7所示。
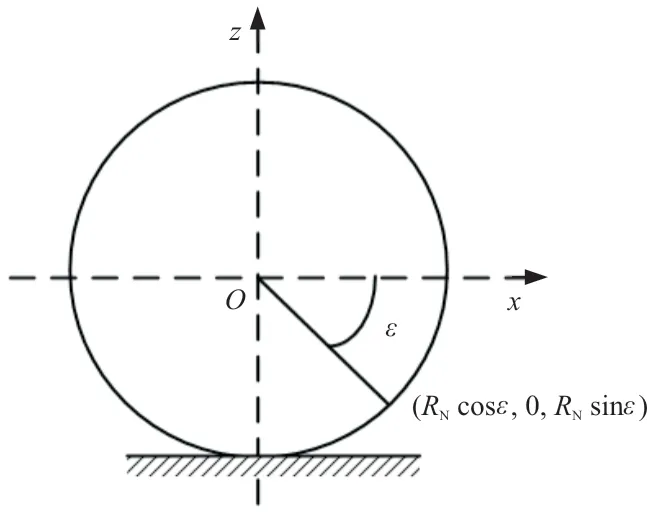
圖7 機輪構(gòu)造坐標系示意圖Fig.7 Wheel structural coordinate system
將機輪構(gòu)造坐標轉(zhuǎn)換到相對于地面坐標,將機輪構(gòu)造坐標系的z軸旋轉(zhuǎn)與前起落架轉(zhuǎn)向軸重合,經(jīng)前輪偏轉(zhuǎn)后再轉(zhuǎn)換回機輪構(gòu)造坐標系。因此機輪外輪廓坐標轉(zhuǎn)換到地面的過渡矩陣為

式中:δ為前輪偏度;λ為前起落架前傾角;L i(σ)為繞i軸旋轉(zhuǎn)σ角的轉(zhuǎn)換矩陣。
將機輪輪廓坐標轉(zhuǎn)換相對地面坐標后,z坐標對極坐標因子ε進行求導,令其為0,可求得觸地點的極坐標因子。

因此垂直于輪軸到機輪觸地點的向量可定義為(-sinε,0,cosε),滾動方向δng為

若起落架前傾角λ=12°,前輪偏度與滾動偏度的關系如圖8~圖9所示。

圖8 前輪偏度與滾動方向的關系示意圖Fig.8 Relaction diagram of nosewheel deflection with rolling direction

圖9 前輪偏度與滾動方向的差Fig.9 The difference of nosewheel deflection with rolling direction
根據(jù)式(15)~式(17)可以求得δng,但通過式(14)得到的δng反推出δ的公式過于復雜。為了簡化計算,根據(jù)式(15)~式(17)先計算出每個δ角度對應的δng,形成δ-δng插值表(如圖8所示),再根據(jù)該插值表進行線性插值可由滾動方向偏度δng得到前輪轉(zhuǎn)向偏度δ。
4 偏度隨速度變化限制
根據(jù)前輪偏度與滾動偏度的關系,可求得前輪隨速度變化的限偏,如圖10所示。

圖10 前輪隨速度的限偏Fig.10 Nosewheel deflection limit according to speed
從圖10可以看出:前輪限偏角度與速度大致呈反比的關系,這與側(cè)向過載一定時轉(zhuǎn)彎半徑與速度平方成反比相一致。
由于前輪機械極限偏度有限,低速時前輪偏度受機械極限的限制,因此考慮機械限制的前輪隨速度變化的限偏如圖11所示,其中起飛/降落構(gòu)型的最大速度分別是抬前輪速度和著陸觸地速度。

圖11 機械極限限制下前輪隨速度的限偏Fig.11 Nosewheel deflection limit according to speed base on mechanical limit
從圖11可以看出:起飛/降落時在飛機離地前,前輪限偏都大于0,都保留一定程度的糾偏能力;同等速度下,由于降落構(gòu)型的升力大,因此降落構(gòu)型的限偏比起飛構(gòu)型大;低速時,由于兩種構(gòu)型升力差距減小,限偏角度接近一致。
5 中立位的計算
由于飛機在滑跑過程中受不對稱滑流或側(cè)風的影響,氣動偏航力矩和側(cè)力不為0。這種情況下,上述限偏是相對中立位的增量值,而中立位不為0,前輪需要額外的偏度以平衡氣動偏航力矩和側(cè)力相對于重心的力矩。
令前輪支反力為FN,主起落架支反力為FM,根據(jù)力和力矩相等的關系,可求得各速度下的FN:

而前輪側(cè)向力fN平衡氣動偏航力矩,根據(jù)平衡關系:

根據(jù)計算出的FN和fN,由輪胎試驗曲線或者輪胎側(cè)向力模型[11-12]可求得中立位,如圖12所示。

圖12 前輪中立位隨速度變化的示意圖Fig.12 Diagram of nosewheel neutral position according to speed
從圖12可以看出:由于起飛時油門最大,不對稱滑流更為嚴重,因此起飛構(gòu)型下前輪的中立位比著陸構(gòu)型更加偏置。
將中立位與限偏極性疊加即可得到前輪隨速度變化的偏轉(zhuǎn)范圍,如圖13所示。

圖13 前輪偏轉(zhuǎn)范圍隨速度變化的示意圖Fig.13 Diagram of nosewheel deflection range according to speed
6 結(jié) 論
(1)本文通過對飛機滑跑時相對側(cè)翻軸力矩的分析計算,得到了前輪隨速度的限偏及其中立位,計算結(jié)果符合前輪在不同速度下的偏轉(zhuǎn)特性。
(2)由于升力相對于側(cè)翻軸提供了利于側(cè)翻的力矩,因此相同速度下,降落構(gòu)型的前輪限制偏度更小。
(3)飛機在起降階段的全滑跑速度范圍內(nèi)(起飛時小于抬前輪速度,著陸時小于觸地速度)都具有不導致側(cè)翻的前輪偏轉(zhuǎn)范圍,因此起降滑跑的全過程都可使用前輪進行糾偏。
(4)根據(jù)本文得到的前輪隨速度的限偏范圍,可以在防止側(cè)翻的同時,保留飛機滑跑時最大的糾偏轉(zhuǎn)彎能力。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
