基于無線光通信設(shè)備的多光軸平行度校正系統(tǒng)研究
2021-06-28 11:13:10許新勇譚乃悅馬擁華馬建軍
廣東通信技術(shù) 2021年6期
[許新勇 譚乃悅 馬擁華 馬建軍]
1 引言
隨著無線光通信技術(shù)的不斷發(fā)展,多光譜多光軸共光路的光電探測系統(tǒng)已經(jīng)廣泛的應(yīng)用于各種平臺(tái)的無線光通信設(shè)備之上。這類設(shè)備一般包含信標(biāo)發(fā)射、粗跟蹤接收、信號(hào)發(fā)射、精跟蹤接收以及信號(hào)接收等多個(gè)主被動(dòng)光軸,同時(shí)包含信標(biāo)光和信號(hào)光兩種不同的波長。各個(gè)光軸之間的平行度是無線光通信設(shè)備非常重要的指標(biāo)。信標(biāo)發(fā)射與粗跟蹤接收光軸之間平行度影響設(shè)備的掃描捕獲成功概率,信標(biāo)發(fā)射與精跟蹤接收光軸之間平行度影響設(shè)備能否正常跟蹤,信號(hào)發(fā)射與精跟蹤接收光軸之間平行度影響對端設(shè)備的接收功率,信號(hào)發(fā)射與信號(hào)接收光軸之間平行度直接影響本端設(shè)備的接收功率。總之,各光軸之間的平行度直接影響無線光通信設(shè)備的掃描捕獲跟蹤和通信性能。目前提出的一些針對多光軸平行性檢測的裝置適應(yīng)性不足。本文提出了一種基于無線光通信設(shè)備的多光軸平行度校正系統(tǒng),實(shí)現(xiàn)多光軸平行度校正,并采用自校準(zhǔn)機(jī)制,實(shí)現(xiàn)了該系統(tǒng)不受環(huán)境變化的影響。
2 系統(tǒng)方案
多光軸平行度校正系統(tǒng)主要由離軸式平行光管、目標(biāo)靶、成像監(jiān)控系統(tǒng)、水平電動(dòng)導(dǎo)軌以及上位機(jī)等組成。系統(tǒng)能夠發(fā)射近似遠(yuǎn)場的調(diào)試光源并接收無線光通信設(shè)備發(fā)射的光束,從而實(shí)現(xiàn)多光軸的平行度校正,系統(tǒng)原理框圖如圖1 所示。
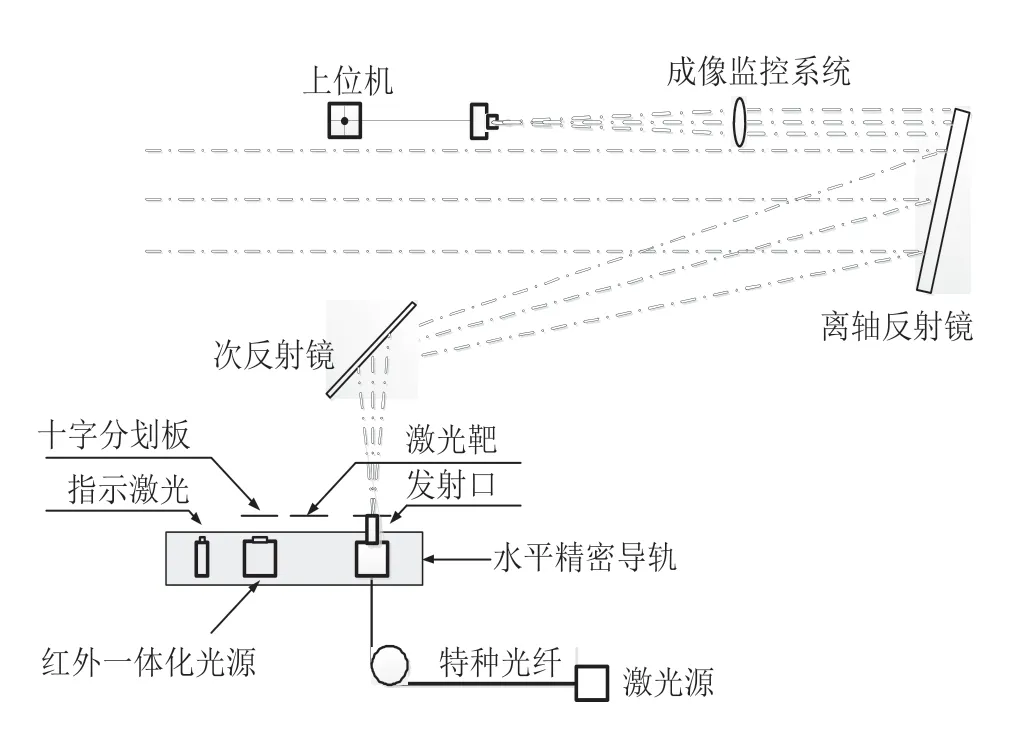
圖1 系統(tǒng)原理框圖
離軸式平行光管由離軸拋物面反射鏡和次反射鏡組成,系統(tǒng)焦距2 m,主要用于對無線光通信設(shè)備發(fā)射激光進(jìn)行聚焦并將目標(biāo)靶的特種光纖發(fā)射激光束進(jìn)行準(zhǔn)直擴(kuò)束。目標(biāo)靶由激光接收靶、特種光纖激光發(fā)射口、紅外一體化光源、指示激光和水平電動(dòng)導(dǎo)軌組成。激光靶采用光學(xué)轉(zhuǎn)換片,可接收無線光通信設(shè)備發(fā)射的激光并轉(zhuǎn)換成可見光;特種光纖激光發(fā)射口是利用800 nm 和1 550 nm 等無線光通信常用波長的光纖激光光源,耦合進(jìn)超高數(shù)值孔徑的單模光纖作為調(diào)試光源;紅外一體化光源采用熱輻射產(chǎn)生紅外光照亮紅外靶板;指示光是紅色準(zhǔn)直激光束,調(diào)試時(shí)作為基準(zhǔn)光軸;水平電動(dòng)導(dǎo)軌主要功能用于上述各目標(biāo)靶之間的切換,在上位機(jī)軟件上利用電控系統(tǒng)可自動(dòng)切換所需要的目標(biāo)靶;成像監(jiān)控設(shè)備位于離軸拋物面反射鏡出射光路中,由成像物鏡和相機(jī)組成,對目標(biāo)靶進(jìn)行觀察和成像并采集靶面圖像,通過上位機(jī)圖像解算方法計(jì)算并測試光軸與基準(zhǔn)光軸的偏差;上位機(jī)軟件主要包括成像監(jiān)控圖像顯示、目標(biāo)靶選擇、光源設(shè)定和測試結(jié)果顯示等功能,分別實(shí)現(xiàn)觀察成像監(jiān)控系統(tǒng)所采集到的靶面圖像、控制各目標(biāo)靶之間的切換、控制紅外一體化光源的各參數(shù)和被測光軸與基準(zhǔn)光軸之間平行度計(jì)算結(jié)果。
3 系統(tǒng)平行度誤差分析
影響多光軸平行度校正系統(tǒng)的平行度調(diào)試精度有3個(gè):離軸式平行光管、電動(dòng)導(dǎo)軌切換精度以及成像監(jiān)控相機(jī)質(zhì)心解算誤差。
離軸式平行光管帶來的平行度誤差主要是由特種光纖芯徑大小和離軸反射鏡面形精度引起的。離軸反射鏡面形精度優(yōu)于λ/40(λ=632.8 nm),因此面形精度引起的平行度誤差可忽略不計(jì)。由于特種光纖出光并不是嚴(yán)格意義上的點(diǎn)光源,而是一個(gè)直徑很小的面光源,面光源發(fā)光經(jīng)過平行光管準(zhǔn)直后出射光束具有一定的發(fā)散角,影響平行度誤差計(jì)算公式如下:

電動(dòng)導(dǎo)軌切換精度直接影響系統(tǒng)各目標(biāo)靶之間的平行度測試精度,導(dǎo)軌通過控制系統(tǒng)將各目標(biāo)靶切換至離軸式平行光管的焦點(diǎn)處,切換精度引起的平行度誤差為:

成像監(jiān)控相機(jī)質(zhì)心解算誤差主要與相機(jī)像元尺寸與成像物鏡焦距有關(guān),質(zhì)心解算誤差引起的平行度誤差為:

4 自校準(zhǔn)系統(tǒng)
多光軸平行度校正系統(tǒng)長時(shí)間使用時(shí),受環(huán)境溫度、平臺(tái)振動(dòng)等影響,使得光機(jī)系統(tǒng)變形,容易導(dǎo)致多光軸平行度校正系統(tǒng)平行度調(diào)試誤差增加。解決的方法是在離軸反射式光學(xué)系統(tǒng)中加入成像監(jiān)控系統(tǒng),利用成像監(jiān)控系統(tǒng)對靶面的特種光纖激光發(fā)射口進(jìn)行觀察、成像并采集光斑圖像,通過對光斑圖像進(jìn)行質(zhì)心解算,確定基準(zhǔn)光軸位置,在長時(shí)間調(diào)試測試過程中隨時(shí)對這一基準(zhǔn)光軸進(jìn)行自校準(zhǔn),并且無線光通信設(shè)備的多個(gè)光軸平行度校正都是以該基準(zhǔn)進(jìn)行平行標(biāo)校,避免平行度調(diào)試過程受環(huán)境影響,提高設(shè)備平行度調(diào)試精度。自校準(zhǔn)系統(tǒng)主要由特種光纖激光發(fā)射光源、離軸式平行光管、成像監(jiān)控系統(tǒng)、上位機(jī)以及軟件等組成。自校準(zhǔn)原理框圖如圖2 所示。
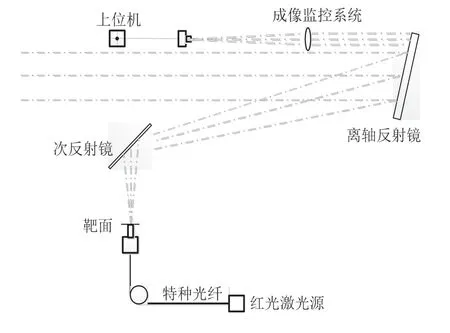
圖2 自校準(zhǔn)系統(tǒng)原理框圖
5 實(shí)驗(yàn)結(jié)果分析
利用多光軸平行度校正系統(tǒng)對無線光通信設(shè)備的光軸平行度進(jìn)行調(diào)試實(shí)驗(yàn)。多光軸平行度校正系統(tǒng)及調(diào)試現(xiàn)場如圖3 所示。

圖3 光軸平行度校正系統(tǒng)及調(diào)試現(xiàn)場
無線光通信設(shè)備的設(shè)計(jì)通信距離為10 km,信號(hào)光波長為1 550 nm,信號(hào)發(fā)射光路發(fā)散角為0.2 mrad,信號(hào)接收視場角為0.57 mrad,信標(biāo)光波長為808 nm,信標(biāo)發(fā)射光路發(fā)散角為1.5 mard,粗跟蹤接收光路的接收視場角為,精跟蹤接收光路的接收視場角為2 mrad。無線光通信設(shè)備兩終端利用多光軸平行度校正儀調(diào)試后,在相距10 km 的外場固定點(diǎn)進(jìn)行掃描捕獲跟蹤通信全流程實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果表明,當(dāng)建立穩(wěn)定的通信鏈路后,兩端設(shè)備的粗跟蹤探測器和精跟蹤探測器上的接收光斑質(zhì)心與室內(nèi)測試跟蹤點(diǎn)一致,信號(hào)探測器同時(shí)接收最大功率,與視場中心相差約32 μrad。實(shí)驗(yàn)驗(yàn)證了多光軸平行度校正系統(tǒng)的調(diào)試測試精度,滿足近距離無線光通信設(shè)備平行度校正實(shí)際應(yīng)用需求。
6 結(jié)束語
本文設(shè)計(jì)了一種基于無線光通信設(shè)備的多光軸平行度校正系統(tǒng),利用自校準(zhǔn)機(jī)制實(shí)現(xiàn)觀察成像與光軸偏差測量,提高了平行度調(diào)試測試精度。該系統(tǒng)具有調(diào)試方便、不受環(huán)境變化影響等優(yōu)點(diǎn),為實(shí)現(xiàn)多光譜多光軸的無線光通信設(shè)備平行度裝調(diào)具有非常重要的意義。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年12期)2018-08-01 00:47:44
制造技術(shù)與機(jī)床(2017年6期)2018-01-19 02:41:21
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電子制作(2017年19期)2017-02-02 07:08:38
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
