一種人工智能迷宮穿梭電腦鼠
2021-06-28 00:46:01龍行杜強王寧楊荃文
現代信息科技 2021年1期
關鍵詞:結構設計
龍行 杜強 王寧 楊荃文


摘? 要:作為微型輪式機器人,電腦鼠能夠自主地求解迷宮。文章對電腦鼠車身結構進行了研究,通過加入新型雙層吸盤裝置增大壓力,提高電腦鼠在迷宮穿梭時的速度,降低電腦鼠高速運行下打滑的風險;對算法控制等方面的研究與改進,電腦鼠能夠在迷宮中找到從起點到終點的最佳路徑。在當今智能社會的發展趨勢下,電腦鼠具有廣泛的實用價值,其技術可以推廣到自動導航和避障機器人等多個行業。
關鍵詞:輪式機器人;電腦鼠;結構設計;算法控制
中圖分類號:TP301.6;TP242.6? ? ? 文獻標識碼:A 文章編號:2096-4706(2021)01-0168-04
An Artificial Intelligence Maze of Shuttle MicroMouse
LONG Hang,DU Qiang,WANG Ning,YANG Quanwen
(School of Information Science and Engineering,Tianshi College,Tianjin? 301700,China)
Abstract:As a micro-wheeled robot,micromouse can solve maze independently. In this paper,the body structure of the micromouse is studied. By adding a new double-layer sucker device to increase the pressure,the speed of the micromouse in the maze shuttle is improved,and the risk of the micromouse slipping at high speed is reduced;through the research and improvement of algorithm control,the micromouse can find the best path from the beginning to the end in the maze. Under the trend of todays intelligent society,the micromouse has a wide range of practical value,and its technology can be extended to industries such as automatic navigation and obstacle avoidance robots.
Keywords:wheeled robot;micromouse;structure design;algorithmic control
0? 引? 言
電腦鼠是一個基于微處理器控制的、集傳感器與控制于一體的、能夠自動穿梭迷宮的智能微型機器人[1]。迷宮由16 cm×16 cm、18 cm×18 cm的正方形單元格組成,迷宮的隔墻板沿方塊的四周布設,形成迷宮通道,起點設在迷宮的四個邊角,終點設在迷宮正中心,由四個正方形單元和一根固定柱子構成。電腦鼠微處理器刷入迷宮搜索算法后,可對迷宮進行探測及記錄迷宮信息,規劃出一條最佳路徑,最后從起點以最快速度沖刺到終點。
現階段,在國內僅有少數科研院所能對電腦鼠進行自主研發和設計,成都理工大學設計的電腦鼠在大陸首次使用對角過彎[2];天津大學則首次在電腦鼠機身加入吸盤結構,用來提高電腦鼠運行的穩定性[3];在2018年11月第七屆“啟誠杯”電腦鼠走迷宮競賽中,天津天獅學院龍行同學獲得企業組賽題第一名,受邀參加在日本東京舉行的第39屆全日本電腦鼠國際公開賽,與國際電腦鼠頂級專家學習、交流[4,5]。
電腦鼠作為一種微型輪式機器人,涉及許多工程專業技術,影響其運行速度與穩定性的因素很多。在研究電腦鼠的過程中,其車體結構設計與搜索算法尤為重要,在運行中最有可能影響到電腦鼠的穩定性,因此改進電腦鼠車體結構,加入新型雙層吸盤裝置,增加電腦鼠吸地力,以保證其運行穩定;同時,優化搜索算法,使得電腦鼠能夠適應吸盤結構,在電腦鼠運行時,可以根據需求任意切換法則,求解迷宮。
1? 車體結構設計
電腦鼠在迷宮中穿梭并到達終點,車體結構是實現所有功能的載體,結構分析是電腦鼠設計的基礎。
機械結構設計對于電腦鼠而言具有重要作用,若其設計得當,可大幅加速,同時良好的機械結構設計,也可以提高電腦鼠運行的穩定性[6];如果設計不合理,就會導致其運行穩定性差,就算擁有優良的運行算法也不能發揮其最佳的運行效果,國際上的電腦鼠愛好者都在積極設計以及尋找布局合理的機械結構,力爭結構做到完善。本文針對傳統電腦鼠高速運行轉彎時產生的打滑現象、重心不穩的問題,優化板載,增加設計了雙層吸盤裝置,其結構如圖1所示,雙層吸盤裝置包含渦輪長形扇葉與渦輪短形扇葉,空氣從渦輪長形扇葉處被吸入吸盤裝置,然后從渦輪短形扇葉排出,增加空氣與其扇葉的受力面積,增大了壓力,使得電腦鼠車輪與路面摩擦力變大,提高了電腦鼠機身穩定性。同時,為了保證電腦鼠運行速度,降低電腦鼠高速下打滑的風險,本文將電腦鼠整體結構設計為四輪兩驅結構,其整體結構如圖2所示。
2? 電腦鼠算法控制
2.1? 紅外線檢測
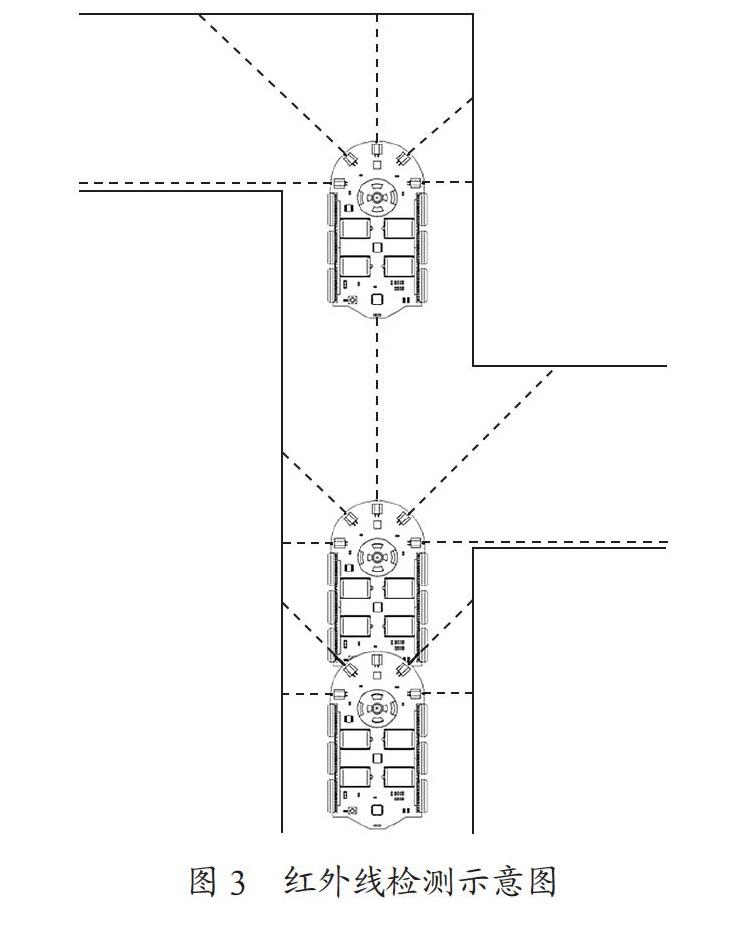
由圖2可知,電腦鼠利用前端車頭五個紅外傳感器來檢測迷宮道路情況,然后判斷是否存在路口。電腦鼠在迷宮中運動時,其紅外檢測示意如圖3所示,電腦鼠左右紅外傳感器時刻檢測路口存在情況;斜45度紅外檢測居中位置并進行實時校準;圖3所示迷宮第一個路口前方存在新路口,電腦鼠在搜索算法中進行路線記憶,若此處右轉,前方無路可達終點,電腦鼠返回最上方位置的路口;在第一個路口右轉時,右側紅外傳感器相應檢測值變大,此時右側紅外不能進行轉彎,電腦鼠還未進行右轉,斜45度紅外傳感器檢測值將由大變小,標記到達設定值時則會右轉,在程序內進行轉彎角度設置,斜45度紅外傳感器繼續輔助轉彎,返回檢測值,等待回正。
2.2? 車輪電機控制
車輪電機控制包括驅動時序、速度調節、轉角調節,保證電腦鼠在迷宮中能前進、掉頭、左轉、右轉、加速、減速。
在以上基本要求中,轉彎控制是最重要的;在迷宮中有許多道路,無法轉彎則會失去走迷宮的能力,所以在第一次啟動搜索迷宮時,運用轉彎函數實現電腦鼠的轉彎功能,并實時繪制等高圖。等高圖是車體行走在地圖中時,運用紅外傳感器感知到的迷宮地圖上的路況信息,也就是將紅外數據進行壓棧,并將數據進行存儲,以棧來記憶并標出從起點到終點相應迷宮格數以及拐彎信息的圖像,許多封閉路徑的脫離與沖刺的道路都可在制作出等高圖后迎刃而解,使電腦鼠少走一些彎路。轉彎函數不僅僅是程序控制電機轉速實現的,還會運用紅外以及陀螺儀檢測,依據檢測值實時對程序中的轉彎常量進行減弱或者加強,從而減少轉彎時可能出現的打滑、傾斜、早拐等現象,有利于繪制等高圖。
在迷宮搜索后,電腦鼠返回起點,此時等高圖已經繪制完成,最優路徑已經產生,并且記錄著迷宮的路況信息,此時紅外傳感器以及陀螺儀起到定位核實等高圖的作用,需將實現紅外感知功能以及陀螺儀感知功能封裝在沖刺函數中,運用對等高圖的讀取來控制電機在直道時加速行駛,在彎道時通過紅外傳感器以及陀螺儀的檢測實現高速轉彎,以最快的速度沖向終點。其中沖刺函數的速度可在程序宏定義中調節,防止在極限因素下無法正常行駛造成機體損壞。
2.3? 電腦鼠搜索算法
電腦鼠涉及的算法分兩種,即迷宮搜索算法和迷宮最短路徑算法。在未知的迷宮中,從起點迷宮格搜索到終點格,然后以相同路徑返回;搜索算法要求在最短的時間內搜索到盡可能多的迷宮格,以避免搜索重復、搜索混亂、搜索錯誤等。迷宮最短路徑算法是根據電腦鼠從起點搜索后,從獲得的迷宮信息中計算出一條從起點到終點的最短路徑,最短路徑要求彎道盡量少,所花時間為最短。
迷宮搜索算法較多,常采用右手法則、左手法則、中左法則、中右法則、中心法則[8]。實際應用時,可選擇其中任意法則。電腦鼠的相對方向決定了其下一步使用的搜索算法,法則切換流程圖如圖4所示,右手法則即使檢測第一個右轉路口,若無右轉路口進入最后一個左轉路口;中右法則即使過中心線后的第一個右轉路口;左手和中左法則與上述兩個法則類似。當無路可走時,折回搜索行走過的路線不在法則中,防止重復記錄路線生成錯誤。
以中心法則為例,將迷宮分為四塊,中心法則搜索圖如圖5所示,箭頭為地圖中心位置即每塊的邊界;首先,左下角為起點,位于迷宮左下塊,此時切換為中右法則且車頭位置向上,控制電腦鼠正常走入左上塊,穿越迷宮中心線后到達迷宮左上塊,切換為右手法則,地圖顯示為到達“2”下方右轉,右轉后車頭向右,此時算法為中右法則,控制電腦鼠穿越迷宮中心線,當過中心線時,電腦鼠即達到右上塊,車頭朝右,此時,將法則轉換為右手法則,進入第一個死胡同,無法繼續前進,進行掉頭,掉頭后車頭朝向應為向上,轉換為左手法則,如上所述,經過多種法則轉化后,電腦鼠達到迷宮中心,完成迷宮穿梭求解。
在使用中心法則時,電腦鼠利用前端車頭紅外傳感器獲取到十六進制數值,結合等高圖Y軸坐標判斷出電腦鼠在迷宮的方位,迷宮起始方向為X軸,而下列代碼中GmcMouse.cY是通過等高圖繪制出的結構體數據與紅外傳感器當前讀取的數據求“或”操作,得到電腦鼠的位置,之后通過車頭方向GucMouseDir選擇相應的算法法則,并跳轉至程序相應位置,其中leftMethod()為左手法則,rightMethod()為右手法則,frontRightMethod()為中右法則,frontLeftMethod()為中左法則,具體代碼實現為:
if (GmcMouse.cY & 0x08) {
/* 此時電腦鼠在迷宮的右上角 */
switch (GucMouseDir) {
case UP:? ? ? ? ? ? ? ? ? ? /* 當前電腦鼠向上 */
leftMethod(); break;
case RIGHT:? ? ? ? ? ? ? ? ?/* 當前電腦鼠向右 */
rightMethod(); break;
case DOWN:? ? ? ? ? ? ? ? ? /* 當前電腦鼠向下 */
frontRightMethod(); break;
case LEFT:? ? ? ? ? ? ? ? ? /* 當前電腦鼠向左 */
frontLeftMethod(); break;
default: break;
}
}
else {
/* 此時電腦鼠在迷宮的右下角 */
switch (GucMouseDir) {
case UP:? ? ? ? ? ? ? ? ? ? /* 當前電腦鼠向上 */
frontLeftMethod(); break;
case RIGHT:? ? ? ? ? ? ? ? ?/* 當前電腦鼠向右 */
leftMethod(); break;
case DOWN:? ? ? ? ? ? ? ? ? /* 當前電腦鼠向下 */
rightMethod(); break;
case LEFT:? ? ? ? ? ? ? ? ? /* 當前電腦鼠向左 */
frontRightMethod(); break;
default: break;
}
}
3? 結? 論
人工智能電腦鼠的結構設計與算法控制研究在機器人領域中是一個十分重要的分支。本文設計了一種四輪兩驅電腦鼠,加入雙層吸盤裝置,使得電腦鼠通過吸盤抽取底部的空氣,利用大氣壓強提高吸附強度,提高了電腦鼠運行的穩定性,這種研究可以廣泛運用到各種吸附機器人中;同時,對車輪電機控制以及電腦鼠搜索算法進行了研究,使得電腦鼠能夠在迷宮中加速與轉彎,隨時切換搜索法則,自主求解迷宮。在5G時代來臨之際,無人駕駛汽車、自動派送無人機等自動化智能設備興起,人工會智能終會成為21世紀發展的方向。
參考文獻:
[1] 龍威林.教學型智能移動機器人控制系統設計研究 [D].天津:天津大學,2014.
[2] 劉曉云.機器人研究對自動化事業的重要性 [J].科學技術創新,2018(31):159-160.
[3] 宮兆儉.新型電腦鼠的設計開發 [D].青島:中國海洋大學,2013.
[4] 啟程科技.中國代表團遠赴日本參加第39屆全日本電腦鼠國際公開賽 [EB/OL].(2018-12-12).http://m.qcmcu.com/index.php?a=show&catid=16&typeid=13&id=91.
[5] 啟誠科技傳媒.中國代表團遠赴日本參加第39屆全日本電腦鼠國際公開賽 [EB/OL].(2018-12-14).https://dy.163.com/article/E30FNGBH0518T9LL.html.
[6] 王磊.基于IEEE電腦鼠走迷宮競賽的迷宮算法分析與實現 [D].濟南:山東大學,2013.
[7] 江峰.新型電腦鼠軟、硬件系統的優化 [D].南京:東南大學,2015.
[8] 吳建明.電腦鼠走迷宮算法模擬器的仿真建模與實現 [J].電腦開發與應用,2014,27(7):33-35.
作者簡介:龍行(1998—),男,苗族,貴州凱里人,本科在讀,研究方向:嵌入式系統開發。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23