一種智能載重機器人的研制和應用
2021-06-29 11:03:24韓宇弦
科技創新與應用 2021年17期
韓宇弦
(南華大學,湖南 衡陽421001)
1 研制原由
減少搬運過程中被物品壓傷造成的意外傷害,減少設備自身的受損幾率(如圖1),減少人員成本支出;用機器代替人工,響應國家關于行業創新的要求,研發的關鍵核心達到行業首創,填補行業空白。

圖1
需求主要來自四個方面:
需求一:需要提質增效,解決人工搬運時間長(上下樓梯首趟為5-10分鐘,隨著體能消耗時間逐漸增加),效率低的問題(一般3-4人搬運一臺設備)。
需求二:需要解決搬運工人在工作過程中受到的傷害(2年11起),設備在搬運過程中的狹小空間受到的損傷(2年8起),實現智能化搬運。
需求三:需要解決出現的特需情況(如新冠疫情期間無人化運輸、各種環境氣候路況情況下的緊急搬運、為各個行業進行服務等)。
需求四:需要滿足專業要求和規定,既為綠色服務添磚加瓦,也為高質量檢修運行奠定發展基礎。
根據需求結合實際情況,形成了以下工作目標:(1)研制一種可以裝載100kg物品的智能載重工具,解決人工搬重小于20kg,或者由于表面光滑只能單塊搬運的問題,即保證在載重100kg的情況下,平均爬樓時間小于5分鐘/趟。(2)研制一種可以適應50度以上樓梯坡度,并在1200×700×450空間自由行使,進行180度轉彎的智能載重工具,實現全過程機器操作,避免人員設備受到傷害。(3)研制一種可以遠距離操控行駛的智能搬運工具,并能在各種環境行駛,為各種行業進行服務。(4)研制一種無污染、無干擾、無損傷,全過程機器操作的智能運輸工具。
經過一系列實施方案:(1)實現了載重物(35kV電流互感器:80kg,導線:90kg)平穩行走,平穩上下樓,節約時間80%,提高效益超過200%。(2)實現了全過程機器搬運,人工受傷害為0,設備受傷害為0。(3)實現了變電工作節能、增效以及綠色能源的企業要求。
2 項目創新點
對智能載重工具的需求:(1)外部需求,需要解決電力生產工作搬運設備時間長、效率低的問題;(2)內部需求,以供電可靠性為導向,結合標準化作業流程,需要解決智能載重工具在狹小空間的前進和轉彎,最大限度提高生產效率;(3)環境需求,需要解決智能載重工具符合發展需要,適應環保要求,不破壞環境,符合綠色發展的要求。
創新水平:根據查新,國內樓梯搬運工具主要是使用三個360度轉向輪子完成爬樓動作(如圖2),前進時需要人用力或用身體重量把握平衡方向,且承重較輕。國內目前還沒有關于載重自動爬樓梯搬運小車專門應用于設備搬運的記錄,本裝置的研制填補了國內技術研究空白。

圖2
(1)本裝置首創了履帶式行走;(2)發明了防止車輛倒滑的倒車鎖緊裝置;(3)解決了樓道平臺以及其他有限空間小角度轉不過彎的問題,同時解決了裝置抗干擾的行業難題。
工具創新點:(1)首創采用全橡膠履帶,履帶內置添加高強度復合纖維添置層和高分子材料,保證零下30℃和零上40℃使用,無明顯冷硬和熱軟現象保證抗拉斷力,使底盤行走平穩對地抓力大且不對地面造成破壞。爬樓梯過程中大支撐輪和小支撐輪交替與樓梯臺階接觸,保證運行過程中不會太大抖動或翻倒,可在0-35度的樓梯坡度、0-20cm的臺階高度實現上述目標;(2)為了防止上下坡下滑,工具將馬達驅動設計為后輪驅動,馬達有帶防下滑夾緊裝置,以防止意外情況或者電量不足時后滑;(3)轉彎半徑小,內含陀螺儀平衡機構。設置了左右電機,可同時運動,也可不同時運動,其轉動方向可相同,也可不同。當速度不同時就實現轉彎,回轉半徑≧1m,樓梯轉角寬度≧1.5m,樓梯轉接平臺≧1.5m。若一個電機工作而另一電機不工作則可以實現原地轉彎;平地行駛時后擺支撐向上收起,減少轉向空間;(4)減震系統采用載人減震級別設計;(5)滿足整車載重避重結構設計。低重心,雙電機電子控制器,正反轉控制和差速控制,實現中心轉向和原地制動轉向。
3 技術實施性
技術方面:裝置包括儲物箱、配電箱和行駛履帶,配電箱包括驅動機構、支撐機構以及平衡輔助機構,運輸機器人依靠驅動機構的驅動力對行駛履帶施加牽引力,當運輸機器人爬樓梯時依靠支撐機構的作用力使行駛履帶與樓梯臺階接觸,當運輸機器人下樓梯時依靠平衡輔助機構的作用力使行駛履帶始終與樓梯成傾斜接觸。本發明的優點:通過配電箱上的驅動機構對行駛履帶施加牽引力來控制行駛履帶的運動,在爬樓梯過程中通過支撐機構的作用力來確保行駛履帶與樓梯臺階接觸,從而確保運輸機器人在爬樓梯過程中的穩定性,能減少運輸機器人的翻倒,提高爬樓梯的效率,減少了人工的搬運強度,提高了重物搬運時的安全性能(見圖3)。
圖3
3.1 裝置總裝
小組對各個部件的設計完成以后,交相關代工廠進行加工并進行組裝。裝置包括:1儲物箱、2配電箱、3履帶、4驅動輪、5大支撐輪、6履帶側鋼板、7平衡輔助鋼件(見圖4)。
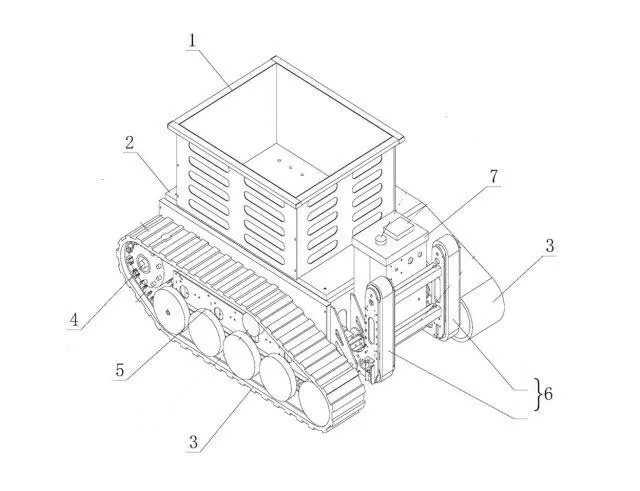
圖4 裝置介紹
3.2 可推廣性
該裝置不僅可用于變電所的設備搬運,也可在不同行業、不同環境、不同領域使用。因方便、安全、環保、可靠,已推廣到行業以外使用:(1)5G基站的建設、通訊塔基建的搬運;(2)庫房的物資搬運;(3)水務、天然氣等行業的有限空間搬運作業;(4)新冠疫情期間,來往于應急隔離點各類用品的傳遞。
4 工具創意來源
搬運工具的創意借鑒了:(1)變電所巡檢機器人,根據特定的路線巡視和記錄;(2)坦克技術的履帶功能,可以在不同狀況的路面行走。
風險及控制:(1)裝置突然失電帶來的風險:設計了防下滑夾緊裝置;(2)裝載重物在不同路面的避震、減震:設計了全履帶前進結構;(3)下樓梯時的平衡:設計了平衡輔助件,在電動液壓桿的驅動下放下,始終與樓梯成斜角度接觸,當其離開樓梯與地面接觸時,履帶滾動,保證下樓梯時的穩定。
5 開發的可信性
對于關鍵技術,本裝置借鑒了變電所巡檢機器人,以及坦克在不同狀況路面行走的特點,載重機器人更側重于載重、行走環境(見表1)。

表1
(1)平地行駛時后擺支撐向上收起,減少轉向空間。爬梯時后擺支撐向后放平,增加接地長度,增加穩定性(如圖5)。

圖5
(2)采用全橡膠履帶,履帶內置添加高強度復合纖維添置層和高分子材料,不會損傷路面,適合各種地形行駛(如圖6)。
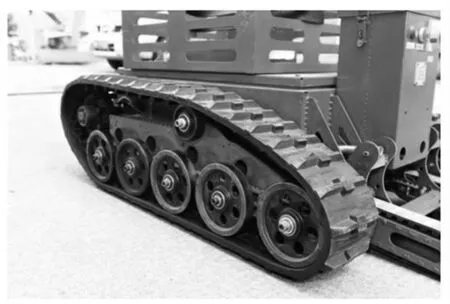
圖6
(3)左右電機可同時運動,也可不同時運動,其轉動方向可相同,也可不同。當速度不同時可實現轉彎,若一個電機工作而另一電機不工作則實現原地轉彎;驅動輪上的固定輪與履帶內側的履帶齒嚙合,對履帶施加牽引力,完成驅動;爬樓梯過程時,履帶外側的特制花紋會先與臺階接觸,可實現穩定抓取,保證行駛過程中不會向下滑落;爬樓梯過程中,大支撐輪和小支撐輪交替與樓梯臺階接觸,保證運行過程中不會太大抖動或翻倒;下樓梯時,平衡輔助件在電動液壓桿的驅動下放下,始終與樓梯成斜角度接觸,當其離開樓梯與地面接觸時,履帶滾動,保證下樓梯時的穩定(如圖7)。

圖7
以上開發過程均列入專利調查說明。
6 項目經濟和社會責任績效成果
(1)經濟方面:減少人工成本,將傷害控制在零。
(2)工作方面:保證了施工工作的順利進行,消除不確定因素,為安全的全過程管控提供了有力支撐,從而平穩開展施工安裝工作,按計劃進行有序供電。
(3)環境方面:智能載重機器人為蓄電池充電,無廢氣產生,噪聲控制在100分貝之內,不干擾其他設備的運行狀態,符合企業和國家綠色能源創新的要求。
(4)安全方面:純手工搬運時,人員和設備受到的傷害幾率較大,更需要考慮搬運人員的身體狀況和環境影響。該項目完成以后再進行作業,人員和設備安全完全可控。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
表面工程與再制造(2019年6期)2019-08-24 06:40:04
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
