淺析基于Modbus通信協議熱矩陣傳感器的設計
2021-06-29 12:36:56張振凱
科學與信息化 2021年16期
張振凱
上海上實龍創智能科技股份有限公司 上海 200436
引言
隨著人工智能的提升,通過視頻判斷人是否在區域內存在的準確度越來越高。但是對于智能樓宇、智能酒店和智能家居這三個領域來說,有大量的私密空間存在,用視頻去判斷就會牽涉到隱私泄露所帶來的一系類麻煩。所以視屏判斷不能覆蓋到這三個領域中的全部區域。此外利用視頻采樣是需要有足夠的光源存在,如果在一個黑暗的空間視頻采集是無法正常工作的。
1 紅外熱矩陣技術概述
紅外熱矩陣技術是一種已有的軍用技術,不過今年來該技術已經向為民用領域開放。該技術是將原先單點紅外傳感器擴展成多點矩陣型,利用點與點之間的差值和單點的溫度圖描述區域內的熱力圖,通過對熱力差值和絕對溫度值分布的分析,得出該區域內是否有人的存在。這種紅外熱矩陣技術具有極強的環境適應能力,它的探測不受外界煙霧、亮度等因素的制約。
傳感器內置的熱矩陣傳感器使用松下紅外陣列傳感模塊AMG8833,這是基于MES技術的紅外陣列傳感器,它的識別像素是一個8×8的64點像素熱力圖。傳感器根據像素熱力圖中各個像素溫度絕對值和像素與像素之間的溫度差值來計算平面溫度分布。通過該傳感器傳遞出的平面溫度分布圖的計算,我們能夠檢測到該區域內移動的人體,還能檢測到靜止人體的位置[1]。
傳感模塊AMG8833的測量溫度范圍是0℃~80℃,理論最長測量距離是7m。這個傳感器輸出的是數字量點陣圖,輸出的通信協議是IIC。AMG8833紅外熱像儀傳感模塊有著緊湊結構便于傳感器集成。
2 Modbus協議
Modbus協議具有其開放性、高可靠性、高效簡單性、免費等優點,在設備監視和控制領域被廣泛使用。Modbus協議具有強大的生命力。協議應用廣泛的設備之間通信的通用語言。控制器之間利用這種協議可以相互之間經由網絡或者RS485、RS232通信。不同廠商生產設備通過Modbus協議交互,進行設備的集中監控。通過ModBus命令能夠實現控制或者讀取一個I/O端口開閉狀態,以及命令設備回送一個或者多個其寄存器中的數據。
3 傳感器設計
3.1 功能及技術指標
這個傳感器主要用于民用空間范圍,通過熱力圖的計算判斷區域內是否有人的存在。設備使用的電源為智能空間經常使用的交流或者直流24V電源。傳感器支持使用6-24V超寬交直流輸入。設備經過測試能抵御GB/T17626.5-2008標準中最高等級4級(4KV)8/20uS的雷擊測試。多種電源保護,抗靜電、過流、防反接等保護措施能有效保證傳感器能可靠運行。
Modbus通信是基于RS485硬件電路,這個電路采用全電氣隔離設計,內部用DC0505作設備電源與RS485電源隔離,RS485接口采用三級防雷防靜電二極管保護,接口防護等級為GB/T17626.5-2008標準中10/700uS測試的最高等級4KV。
探測靈敏度為人進入該區域或離開改區域時間出發后3秒以內。熱力圖掃描頻率為每秒3幀[2]。
3.2 設備設計方案
3.2.1 傳感模塊的選擇。市面上的紅外測溫點陣傳感模塊有這么幾種:松下紅外陣列傳感器MLX90621型16x4像素紅外陣列、AMG8833型8x8像素紅外陣列、GY-MCU90640型32x24像素紅外陣列傳感器模塊。GY-MCU90640型32x24像素紅外陣列傳感器模塊雖然是其他兩款紅外陣列傳感器模塊分辨率的十倍,但是單個傳感模塊的成本將近五百元,因此在這個經濟的紅外陣列傳感器的設計中暫不使用GY-MCU90640型32x24像素紅外陣列傳感器。
MLX90621型16x4像素紅外陣列和AMG8833型8x8像素紅外陣列雖然同為64像素紅外陣列傳感器模塊。但是MLX90621的探測窗口是一個長寬比一比四的長方形,如果傳感器使用這個傳感模塊,那么傳感器在安裝時就必須考慮安裝的方向性問題,并帶來熱力圖計算量的增加,所以最終選擇AMG8833型8x8像素紅外陣列傳感模塊。
3.2.2 傳感器設計架構及模塊設計。如圖1所示,傳感器由電源模塊、處理器模塊、485通信電路、紅外矩陣傳感模塊和光學透鏡組成。

圖1 傳感器架構
電源模塊提供兩套電源,這兩套電源完全隔離。一套電源用于RS485通信電路,另一套電源用于傳感器中起源設備的供電。這樣處理的目是因為成本限制,在施工是強弱電電纜可能會在同一線槽內,這樣在通信線纜上會出現感應電勢,使用兩套電源就能避免感應電勢對傳感器其他期間的干擾和破壞。
在選用設備的主處理器時,考慮到設備的體積及計算能力問題,選擇使用GD32F103RCT6。GD32是一款國產芯片,其最高108MHz的工作頻率,相比于國外STM32F103主頻高出了50%,這50%的算力能夠從容的應對熱力圖的插值浮點運算。GD32具有128KB程序存儲器,40K的內存空。供電范圍為 2.0~3.6V。CPU的IIC接口AMG8833型8x8像素紅外陣列;USART通過RS485轉換電路將TTL信號轉成RS485信號和第三方設備通信。
為了擴大AMG8833探測窗口,提高傳感器的實用性,在AMG8833探測窗口之上增加菲涅耳透鏡。菲涅耳透鏡是由法國物理學家奧古斯丁·菲涅耳發明的透鏡。菲涅爾透鏡的主要作用就是將探測空間的紅外線有效地集中到傳感器上。通過分布在鏡片上的同心圓的窄帶(視窗)用來實現紅外線的聚集。這樣可以彌補AMG8833探測窗口小的問題。
3.2.3 Modbus傳輸協議功能表定義
傳感器于第三方通信交互的內容分成兩部分。一部分是傳感器探測數據的值,包括是否存在人體、探測區域環境溫度兩項。另一部分是傳感器內部設定值包括傳感器設備地址、傳感器通信速率、傳感器探測位置和傳感器所在區域性質[3]。
4 傳感器測量設計
4.1 傳感器安裝位置
如圖2,通常在智慧空間傳感器安裝位置有三個地方:探測區域的正上方;探測區域角落位置;探測區域的邊緣位置。
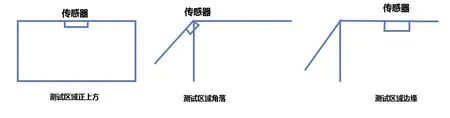
圖2 安裝位置示意圖
這三個傳感器安裝位置的不同會直接影響到傳感器的探測結果。所以我們要在分析計算傳感模塊傳回的數據時,我們要充分考慮到傳感器的安裝位置。并且我們要有三套插值的計算方法。
4.2 傳感器熱力圖插值計算法
為了擴大AMG8833探測窗口,在AMG8833探測窗口正上上安裝了透鏡。在透鏡的使用的同時,帶來面積非線性縮小。即處于中心點像素點所代表的面積要小于外部像素所代表的面積。解決這個問題在非中心位置增加虛擬插入點,即在相鄰兩點中根據插入一個相鄰兩點的平均值。這樣原有8乘8的64個點會增補到120或168個點基本完成點位的線性化。
這個插值計算根據傳感器安裝位置不同,一共有三種不同的計算方法對應三個不同的安裝位置。①安裝在探測區域正上方時中心區域內4×4的點陣保持不動,其余區域相鄰兩點區域插入一個插補點;②安裝在探測區域角落時左上角4×4的點陣保持不動,其余區域相鄰兩點區域插入一個插補點。③安裝在探測區域邊緣位置時左側中間4×4的點陣保持不動,其余區域相鄰兩點區域插入一個插補點。
4.3 人體存在計算
有插值的熱力圖制作完成后,下一步要根據這張熱力圖計算人體存在的可能性。
4.3.1 計算整個區域內一些特征值:區域溫度的最高值、區域溫度的最低值、區域溫度的平均值。
4.3.2 計算區域內所有點陣的溫度值與區域溫度的最低值和區域溫度的平均值差值。這樣每個點陣上有2個相對的差值。
4.3.3 以2×2點陣為一個范圍,把4個點共8個差值經行累加。累加值大于10以上基本可以判定區域內存在人體活動。
5 系統測試與分析
經過測試,傳感器正確率與房間面積成反向線性關系,房間面積越大其正確性越低,這是因為人體所發出紅外熱輻射容易在單位面積內被平均。所以此類傳感器適用于面積較小的空間,比如臥室、浴室和獨立辦公室等。這幾類區域恰恰需要高私密性的傳感器去測試人體是否存在。所以是這類傳感器最佳使用的環境。
6 結束語
本傳感器適用于在于攝像敏感區域去判別人體是否存在。為這類區域的智能和節能控制創造了穩定的基石,通過傳感器基于Modbus協議的RS485接口能夠接入不同的上位空間控制軟件,為其各種算法的實施提供了可靠的保證。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
工業設計(2016年12期)2016-04-16 02:52:00
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
設備管理與維修(2015年12期)2015-04-09 06:57:00
