移動式三維激光掃描技術在礦山測量中的精度及誤差分析
2021-06-30 10:42:10牛家寬錢小峰
現(xiàn)代礦業(yè) 2021年5期
牛家寬 錢小峰
(南京梅山冶金發(fā)展有限公司礦業(yè)分公司)
三維激光掃描技術又被稱為實景復制技術,它是繼GPS技術之后的一次測繪技術革命。由于它突破了傳統(tǒng)測量技術單點測量的局限,采用非接觸式主動測量方式,能夠直接獲取掃描對象的高精度三維點云數(shù)據(jù),并實現(xiàn)了快速建模功能。同時它具有掃描速度快、實時性強、精度高、主動性強、全數(shù)字化等特點,能夠顯著地降低成本,節(jié)約時間,而且使用方便。移動掃描設備重量輕,使用便攜,可適應多種作業(yè)模式,如手持、背包、車載、無人機掛載等,可以輕松掃描室內(nèi)、室外及傳統(tǒng)方式無法到達的空間,并快速建立高精度的三維模型。
基于三維激光掃描技術所具有的顯著優(yōu)勢,研究該技術在傳統(tǒng)礦山測量領域的推廣應用非常有必要,它將徹底突破傳統(tǒng)測量手段的局限性,對數(shù)字化礦山建設工作起到很好的推動作用。
1 移動式三維激光掃描技術的原理概述
GEO-SLAM移動式三維激光掃描儀是基于SLAM算法的移動式三維激光掃描系統(tǒng),由4部分組成,即激光掃描儀、控制器、電源和數(shù)據(jù)傳輸線。掃描作業(yè)時,激光掃描儀360°旋轉(zhuǎn),不間斷地向周圍發(fā)射激光束,根據(jù)發(fā)射出去的和接收回來的激光數(shù)據(jù),利用光速計算掃描儀和掃描目標之間的實際距離,再根據(jù)發(fā)射的激光束的水平角度和豎直角度來計算目標點的空間位置[1]。結合先進的SLAM算法,掃描儀根據(jù)實時測量計算的與周圍目標物之間的距離,可以計算掃描儀與周圍目標物之間的相對位置,即它不需要GPS技術就可以動態(tài)地測量和記錄各種環(huán)境下的空間三維信息,相對于傳統(tǒng)的全站儀、GPSRTK數(shù)據(jù)采集設備,其效率有數(shù)十倍的提升。
使用三維激光掃描儀每次掃描得到的三維點云數(shù)據(jù)都是以掃描儀為原點的空間直角坐標系,在使用中,通常需要將點云數(shù)據(jù)的坐標系轉(zhuǎn)換為所需要的空間直角坐標系,這就需要使用測量控制點,即每次掃描時同時掃描到若干個控制點標靶球,在后期數(shù)據(jù)處理過程中,根據(jù)控制點標靶球的坐標進行坐標系轉(zhuǎn)換。
2 移動三維激光掃描技術應用實例
為了全面評價和驗證移動式三維激光掃描技術在地面和地下不同場景下掃描數(shù)據(jù)的精度和可靠性,選取了地面廠區(qū)三維地形掃描、礦山井下巷道實體掃描以及地面只介紹了2個案例分別進行分析。
2.1 地面廠區(qū)三維地形掃描
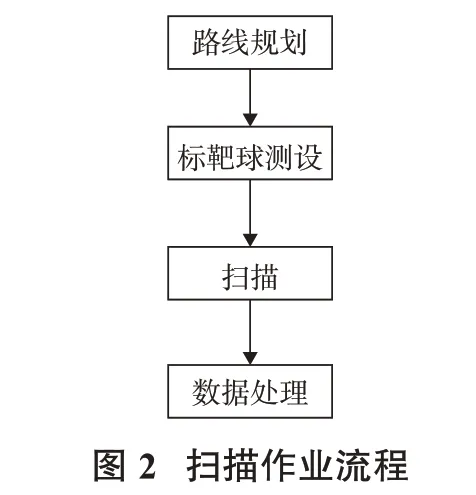
為了驗證移動式三維掃描儀在地面三維地形測量中的數(shù)據(jù)精度的可靠性,在地面廠區(qū)范圍使用移動式三維掃描儀進行快速掃描,采用閉合路線的方法,掃描路線長度約為1 km。掃描前首先在廠區(qū)范圍均勻布設4個標靶球作為掃描控制點,以便于后期對點云數(shù)據(jù)進行坐標轉(zhuǎn)換,進而與已有的地形圖進行精度比對。然后使用移動手持掃描儀按照規(guī)劃路線進行快速掃描,整個過程持續(xù)約12 min,掃描作業(yè)僅需要1人便可輕松完成,如此高的作業(yè)效率徹底顛覆了傳統(tǒng)測量手段的作業(yè)限制。掃描完成后,用專業(yè)U盤直接插入掃描儀控制器的USB數(shù)據(jù)傳輸接口,自動導出點云數(shù)據(jù),然后在室內(nèi)用專業(yè)軟件Geo-SLAM Hub進行點云數(shù)據(jù)預處理,處理過程耗時約30 min。最后將預處理后的點云數(shù)據(jù)導入到Trimble RealWorks軟件進行專業(yè)處理,包括噪點剔除、坐標轉(zhuǎn)換、點云分類、地形制圖以及圖形輸出等操作處理,甚至也可以直接制作三維模型。點云數(shù)據(jù)如圖1所示,作業(yè)流程如圖2所示,標靶球點云擬合球體見圖3。圖3屬于井下,即2.2中內(nèi)容。


2.2 礦山井下巷道實體三維掃描
礦山井下巷道掘進是采礦生產(chǎn)的前道工序,巷道掘進施工質(zhì)量對后續(xù)的回采中深孔設計以及回采爆破有著至關重要的影響。而詳細、真實地測量巷道實體并建立模型是回采中深孔設計的主要依據(jù),也是數(shù)字化礦山建設提出的工作要求[2]。要想真實反映出井下的巷道實際情況,移動式激光掃描技術無疑是最佳的選擇,它以每秒幾十萬甚至上百萬個點云數(shù)據(jù)的掃描速度,可以快速、高效、詳實地測量巷道的每一處細節(jié)變化。為了檢驗移動式三維激光掃描技術在礦山井下掃描數(shù)據(jù)的精度和可靠性,選擇了某鐵礦-366 m水平6-7聯(lián)北2至北10段的區(qū)域作為試驗區(qū),掃描總長度約為480 m的閉合線路。
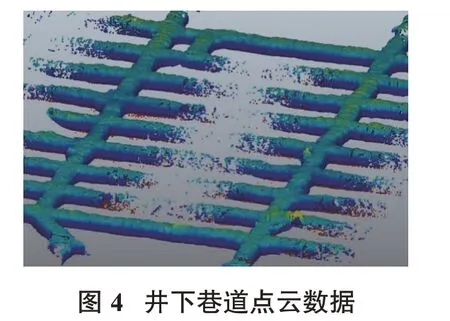
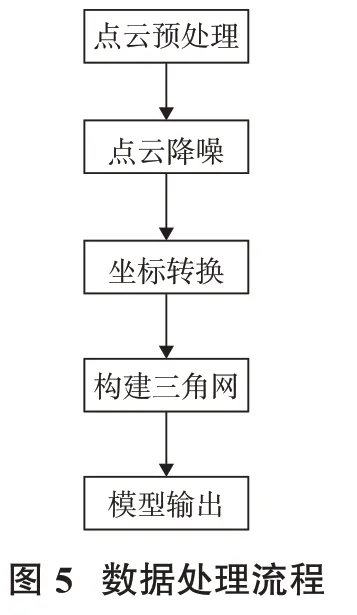
工作流程與地面掃描類似,區(qū)別之處在于標靶球的設置方式不同。由于礦山井下測量控制點均布置在巷道頂板,因此標靶球是懸掛在控制點下的,如圖3所示。掃描得到的點云數(shù)據(jù)如圖4所示。使用專業(yè)軟件依次對點云數(shù)據(jù)進行預處理、降噪處理、坐標轉(zhuǎn)換、構建三角網(wǎng)、模型輸出[3],流程如圖5所示。
3 不同應用場景下的掃描精度評定
3.1 地面三維地形掃描數(shù)據(jù)精度分析
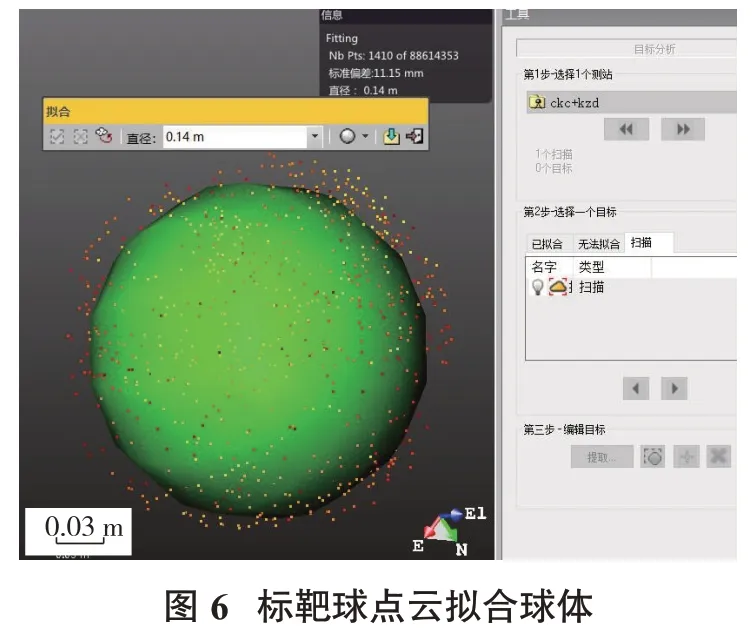
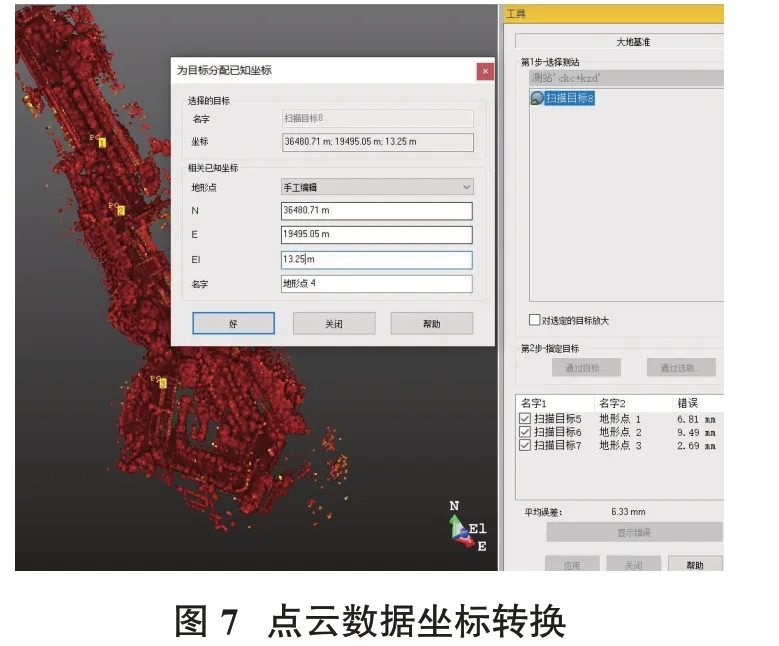
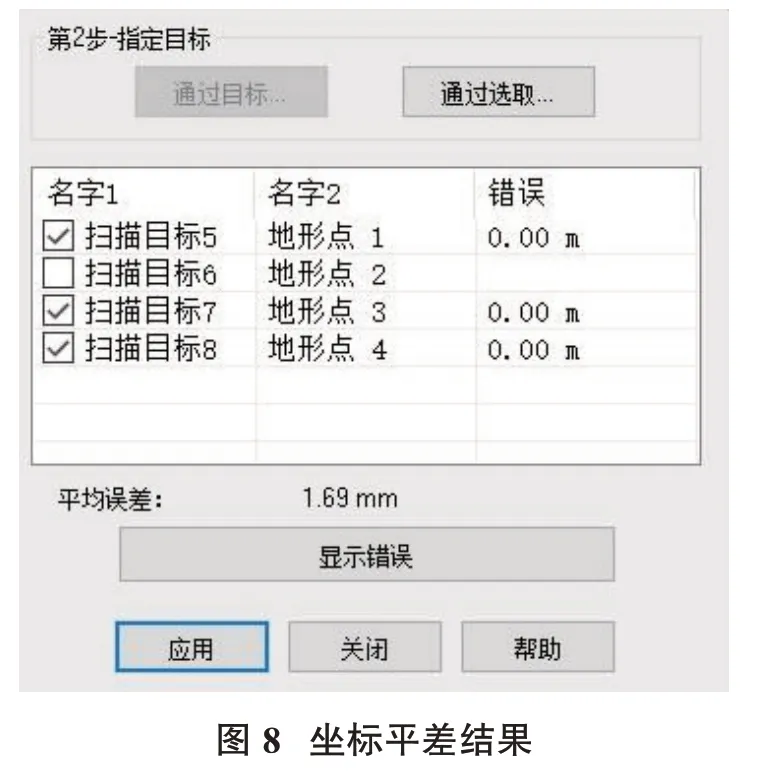
使用Trimble RealWorks軟件對三維點云數(shù)據(jù)進行降噪處理,即去除無用的散點數(shù)據(jù)。然后利用軟件中的目標分析器工具選取標靶球點云數(shù)據(jù),并根據(jù)標靶球的直徑(0.14 m)自動擬合球體,軟件即可自動計算擬合球體球心的假定坐標,如圖6所示。待所有的控制點目標靶球擬合完畢后,把控制點的絕對坐標匹配給對應的球心假定坐標,如圖7所示,即可完成所需要的坐標轉(zhuǎn)換。坐標自動轉(zhuǎn)換過程的控制點平差結果如圖8所示,平均誤差為1.69 mm。
雖然控制點平差結果精度很高,但是還需要在坐標轉(zhuǎn)換后的點云數(shù)據(jù)中量取若干個特征點的坐標,與GPS-RTK現(xiàn)場測量的坐標數(shù)據(jù)進行比對,結果如表1所示。平面位置中誤差最大為53 mm,高程中誤差最大為31 mm,因此移動式三維激光掃描儀在對地面特征點比較明顯的小范圍、地形平坦區(qū)域進行三維掃描的精度可以滿足城市大比例尺地形圖的修測要求。

?
3.2 井下巷道三維掃描數(shù)據(jù)精度分析
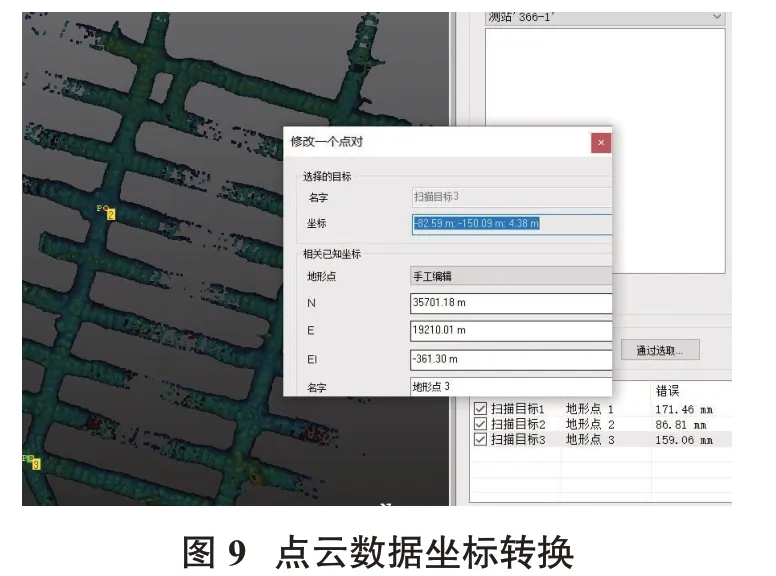
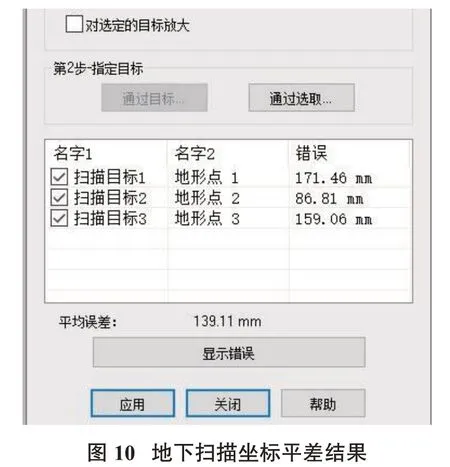
在對巷道三維點云數(shù)據(jù)進行處理后,對標靶球的球心坐標進行坐標匹配,如圖9所示。選取北部和南部共3個控制點進行平差,平差結果為139 mm,如圖10所示。
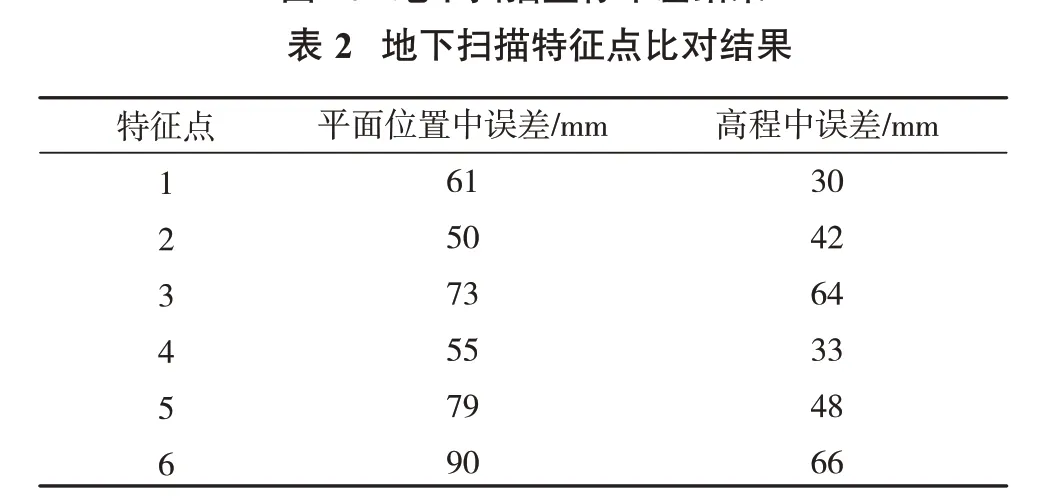
利用軟件的建模工具構建三角網(wǎng),生成實體模型,然后在模型上均勻地量取若干個特征點的三維坐標,并現(xiàn)場用全站儀測量該特征點,進行數(shù)據(jù)比對,比對結果如表2所示。
通過數(shù)據(jù)比對可知,在礦山井下利用移動式三維激光掃描儀掃描的點云數(shù)據(jù)在精度上要比在地面掃描得到的點云數(shù)據(jù)精度低。但是井下巷道平面中誤差最大90 mm,高程中誤差最大66 mm的精度已經(jīng)能夠完全滿足礦山的生產(chǎn)設計要求,相比傳統(tǒng)的測量方法,精度有顯著提高。而且利用移動三維激光掃描技術,不僅作業(yè)效率更高,人力成本更低,在測量一些危險區(qū)域時,人員不必靠近就可以完成掃描工作,作業(yè)安全度也得到了保障。
?
4 點云數(shù)據(jù)誤差來源分析
三維掃描點云數(shù)據(jù)的誤差主要來源于4個方面:一是儀器本身的誤差,二是掃描環(huán)境的影響,三是掃描的方式產(chǎn)生的誤差,四是標靶球控制點的精度影響。
4.1 儀器本身的誤差
儀器本身存在的誤差,一方面是儀器制造的精度誤差,會存在激光測距誤差和測角度誤差[4]。另一方面與點云算法有關,使用的移動式三維激光掃描儀采用SLAM算法原理,即同步定位與建圖,其最早出現(xiàn)在智能機器人領域,用于解決機器人在未知環(huán)境中運動時的定位與地圖構建問題。運用SLMA算法,若要數(shù)據(jù)精度很高,對處理器和傳感器的要求很高,數(shù)據(jù)處理復雜、速度慢,而為了實現(xiàn)便攜、高效的快速掃描,勢必就要損失部分精度。
4.2 掃描環(huán)境的影響
使用SLMA算法的移動式三維激光掃描儀在掃描過程中產(chǎn)生的點云數(shù)據(jù)自動計算并拼接,但是其定位精度取決于周邊環(huán)境的特征形態(tài)[5]。掃描環(huán)境中掃描對象的特征點多且分布均勻,掃描精度相對較高,例如地面小區(qū)樓房的掃描。反之,如果掃描對象的特征點少且不明顯,整個環(huán)境中的對象特征相似,那么掃描精度就會相對較低,例如礦山井下巷道的掃描。
4.3 掃描的方式方法的影響
三維掃描的方式方法也會對點云數(shù)據(jù)精度產(chǎn)生不同影響。經(jīng)過試驗,使用SLAM移動式三維激光掃描儀進行三維掃描時,一是掃描路線要閉合,可以提高掃描數(shù)據(jù)的拼接精度;二是一次掃描范圍不能太大,否則影響數(shù)據(jù)精度。掃描礦山井下巷道的路線最好控制在500 m內(nèi),掃描地面三維空間控制在1 000 m內(nèi),可以保證數(shù)據(jù)的點位中誤差在50 mm內(nèi)。
4.4 標靶球控制點精度的影響
標靶球控制點的坐標精度對點云數(shù)據(jù)的坐標轉(zhuǎn)換起著決定性的影響,所以首先要保證所使用的控制點的精度。其次,標靶球布設的不合理也會對掃描數(shù)據(jù)精度產(chǎn)生影響,一般要求在掃描作業(yè)范圍內(nèi)均勻布設標靶球。
5 結論與建議
經(jīng)過實踐論證,移動式三維激光掃描技術具有實時、快速、高精度的優(yōu)勢,很有必要在礦山測量中盡快推廣應用,對礦山數(shù)字化建設將起到重要的推動作用。移動式三維激光掃描技術不僅能夠滿足一般的大比例尺地形圖的局部修測要求,也能夠滿足礦山井下巷道實體測量、采空區(qū)測量、溜井測量、專業(yè)管線測量以及開采進度測量、礦堆體積測量等[6]。但是使用SLAM移動式三維激光掃描儀單次掃描的范圍具有限制性,如果要保證高精度,地面掃描路線限制在1 000 m以內(nèi),井下掃描路線要控制在500 m以內(nèi),同時要保證有足夠的均勻布設的標靶球控制點,即可保證點云數(shù)據(jù)的精度滿足要求。
猜你喜歡
現(xiàn)代礦業(yè)(2021年12期)2022-01-17 07:30:32
河北地質(zhì)(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產(chǎn)勘查(2020年7期)2020-12-25 02:43:42
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
