消費級無人機傾斜攝影技術難點研究
2021-06-30 03:33:58張亞南
科技風 2021年11期

摘 要:對大部分小型影視動畫、建筑設計公司來說,傾斜攝影制作的實景三維模型,不僅是項目展示的最好平臺背景,也是獲取項目數據與參數的重要來源。但是,五鏡頭傾斜攝影無人機價格較貴、使用要求較高,一般公司若不開展測繪相關工作,配備此類無人機并無必要。而一般設計公司都會購買輕型無人機進行項目環境拍攝、現狀航拍等,本文提出利用輕型的單鏡頭無人機,采用小航高、5向航線設計、高重疊率的方法拍攝傾斜照片,配以二次空三解決模型瓢、斜、重面問題,再輔以三維軟件進行模型修補,從而實現高質量實景模型。以某車輛段工程為實踐,對該方法進行了驗證,結果表明,該方法精度完全滿足項目需要,模型質量好且作業效率高。
關鍵詞:消費級單鏡頭無人機;傾斜攝影測量;模型修補
1 緒論
隨著傾斜攝影技術的逐漸普及,實景三維模型越來越多的運用到項目展示、BIM模型演示平臺制作、影視動畫制作中,它能多視點的對現場數據進行收集,建立具有真實尺寸與地理坐標的現場模型,客觀地反映地表情況,滿足人們對三維信息的需求。但對于大部分小型影視動畫公司、建筑設計公司來說,他們的項目范圍大都為幾棟樓、一個街區、1~2千平方米,為了這種小項目,專門采購多鏡頭測繪級無人機制作實景模型即不必要成本也相對太高。而采用低成本的單鏡頭消費級無人機進行傾斜攝影拍攝,并利用技術手段彌補單鏡頭攝影的缺陷,制作出合格的實景三維模型,將極大的促進實景三維模型的應用范圍,在城市三維建模、項目前期查勘、項目規劃預設計等領域發揮重要作用。
本文基于某城市地鐵車輛段設計工程,探討了使用消費級、單鏡頭、低價格、輕型無人機進行傾斜攝影測量制作三維實景模型,并通過改進相關作業方法,使用技術手段提高模型質量,降低無人機傾斜攝影測量的應用門檻。
2 項目概況
本文研究項目為某市地鐵規劃車輛段工程,地塊現狀已完成拆遷,項目東西各有已建成的多棟約20層樓的住宅建筑。建模范圍東西長約1500米,南北寬約500米,周邊預留安全邊界,拍攝范圍約1平方公里。(圖1)
3 拍攝難點及解決方案
3.1 拍攝器材
次項目航拍采用大疆Inspire1悟pro無人機,該機為四軸飛行器,最大飛行速度18m/s,最大飛行高度2000米。該機最大的優勢是搭載了禪思X5航拍相機,該相機采用了微型4/3的大尺寸傳感器,像素1600萬,能捕捉非常清晰的畫面和豐富的細節,成像質量很好。但正由于該機追求的是卓越的拍攝質量,因此整機重量較大,導致滯空時間短,最大飛行時間只有18分鐘,預留20%電力作為安全備用,再除去到達航點與返航時間,真正的作業時間僅10分鐘左右,以航向和旁向均85%的重疊率計算,一次航程只能拍攝0.2平方公里的范圍。為了最大利用無人機的有效飛行距離,在本次拍攝中對三塊區域分別設置了1個起飛點,以使無人機升空后能盡快到達作業點開始拍攝工作。
3.2 現場建筑高差大
由于拍攝場地周邊建筑高差達到60米,而本項目又是低空拍攝(設計航高120米),因此,如果全場飛行保持同一高度,當無人機飛到相對比較高的樓宇區時,在無人機視場角不變、飛行高度不變的情況下,相對航高將由120米減小到60米,這會導致單張照片覆蓋的范圍變小,進而導致相鄰照片的重疊率變小。當重疊率小到一定程度時,就會導致空三失敗。因此,我們對不同區域采用了不同的飛行方案(圖1、圖2):1區,由于區域內都是低矮的植物及部分平房建筑,采用100米航高正頂視鏡頭一次拍攝;2區小區高樓,采用五向拍攝,即對同一區域飛行5次,分別采集1正射+4個方向傾斜的數據,并在正頂視飛行時加高航高到120米,增大重疊率為90%。
4 建模難點及解決方案
由于本次飛行使用的無人機不帶RTK模塊,無法提供精準定位能力,且由于項目周期及成本原因,現場也沒有做像控點,以及一塊場地多點起飛、多次組合飛行等原因,為后期的建模工作造成了很大的難度。
4.1 空三問題
由于本次使用的無人機只能使用機載GPS進行定位,定位精度較差。當無人機完成一塊電池飛行,返回啟航點更換電池后延續原航線飛行時,往往不能準確到達上次結束的位置,從后期空三文件來看,前后兩次的飛行軌跡平面位置偏差有3—5米,高度方向偏差達到5—10米!
本次實景模型建模使用bentley公司的ContextCapture軟件進行建模,ContextCapture空三對原始相片的畫面質量和定位精度要求較高,因此,本項目在空三階段就出現空三不過的問題。
因此,我們使用了Photoscan軟件進行空三運算。PhotoScan是一款基于影像自動生成高質量三維模型的實景建模軟件,具有較強的空三處理能力,并能將生成的空三文件導出為別的軟件所用。計算步驟為:
(1)photoscan中導入所有航拍影像;
(2)選擇兩次航拍的重合位置,找尋明顯的標志點,如路沿石的轉折點,花壇的角點等,對此標志點進行像控點連接;
(3)空三運算,生成密集點云;
(4)把密集點云文件導出為blocks exchange格式,再把這個文件在ContextCapture中加載,再次空三,通過。
4.2 模型修模
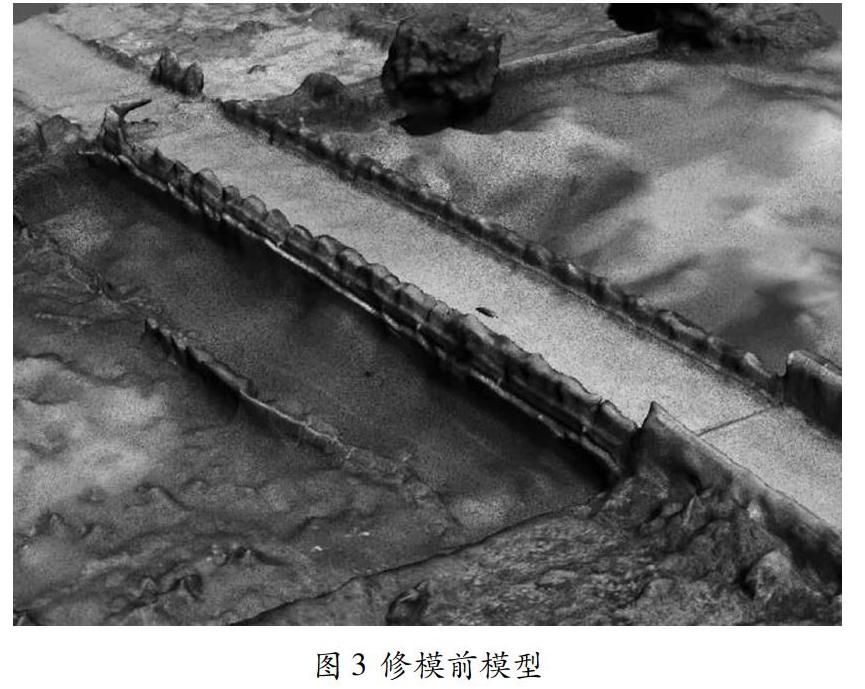
實景建模,對于細小的物體、水面等的建模是一大難點,自動生成的模型往往有模型扭曲、破面等問題,特別是對于本項目采用的消費級無人機拍攝影像所建模型,這類問題更加嚴重(圖3)。這些問題僅憑對ContextCapture的優化是很難解決的。因此,必須通過三維軟件進行修補,本項目中,我們采用3DMAX軟件對生成的模型進一步修整。步驟為:
(1)ContextCapture空三完成后,要對模型進行規則平面網格切塊,每塊大小必須考慮效率與效果,如果分塊太大,每塊修模時會占用過大的內存資源,影響軟件運行效率。而分塊太小又導致模型切分太多,修模數量太大,影響修模效率。可以參考內存占用量,以不超過內存占用90%為標準進行分塊大小設置;
(2)ContextCapture選擇生成三維網格,導出分塊obj格式模型;
(3)3DMAX導入分塊模型。3DMAX具有豐富的三維模型處理工具與方法,針對模型的具體問題可以采用補、刪、擠、拉等手段對模型進行修整;
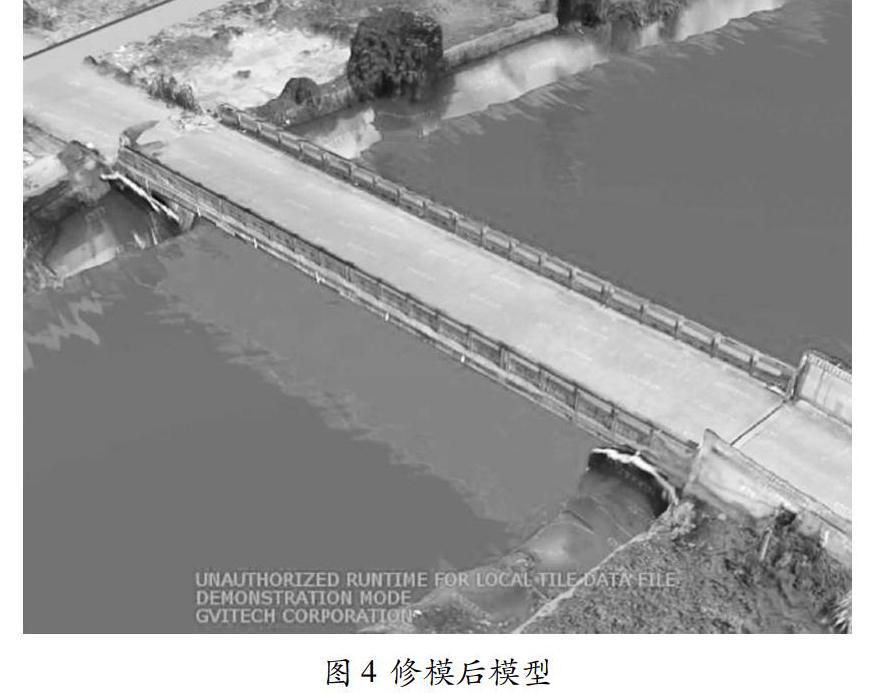
(4)修整完成的模型再次導入ContextCapture,提交更新,生成即可(圖4)。
5 模型質量
對完成的模型進行網格分析與影像分析,采用本流程完成的三維實景模型,影像真實清晰、整體結構準確,除樓宇頂部由于與地面的重疊率相差較大,有部分扭曲外,整體滿足了預期要求。本方法還可根據項目需要對模型的建構筑物以及場平進行調整,是一種可行的傾斜攝影數據采集及建模方案。
6 總結
本研究采用了利于普及的小成本、不需專業測繪技術的方法實現傾斜實景模型的制作。但由于受消費級無人機電池容量、飛行速度、定位精度的影響,本方法只適用于1平方公里左右的小范圍實景模型制作。本研究的方法,對非專業測繪制作公司、應急項目、技術方案探索等應用場景,制作實景三維模型具有很強的適用性,具有巨大的發展潛力。
參考文獻:
[1]李翔,全昌文,陳霖.消費級無人機傾斜攝影數據采集方法研究.測繪,2016(06):263265+280.
[2]許承權,黃小琴,施政.消費級無人機傾斜攝影測量1∶500測圖方法及精度研究.測繪地理信息,2020(01):117120.
[3]吳獻文,張鵬,曾琳.基于消費級無人機傾斜影像的三維測圖技術探討.測繪通報,2019(07):9295.
作者簡介:張亞南(1974— ),男,漢族,四川自貢人,高級工程師,從事GIS\\BIM應用研究。