地鐵隧道中全站儀自動化監測控制網布設及復測技術研究
2021-07-01 02:24:00賈文超張齊莫爵同
廣東建材 2021年6期
賈文超 張齊 莫爵同
(廣東省工程勘察院)
0 前言
隨著我國城市化進程的不斷發展,地鐵已發展為城市公共交通的主動脈,但在地鐵運營過程中,隨著隧道建成年限的增加,由于區域性地面沉降、土層縱向的不均勻性、隧道周邊基坑開挖、隧道滲漏、列車荷載等因素的影響,隧道變形會持續增大,從而影響地鐵的正常運行、乘客乘坐的舒適性。而嚴重的不均勻沉降將直接造成地鐵本身結構的變形,甚至引發安全性問題[1-3]。不間斷涌現的地鐵隧道變形問題引起地鐵運營單位及交通主管部門的重視,因此通過科學合理的方法對隧道變形進行監測具有重要的理論和實踐意義。相較于傳統的監測手段,基于高精度全站儀自動化監測在地鐵隧道監測中得到了較快發展。因隧道狹窄環境下儀器通視條件并不理想及實施成本所限,自動化監測中基準點一般布設在距離變形區域30m~50m的范圍上,但外部施工影響地鐵隧道的變形較為復雜,自動化監測中基準點布設區域亦有可能發生變形,導致監測數據失真,無法真實反映變形情況。
為了解決地鐵隧道中全站儀自動化監測基準點穩定性問題,張正祿等[4-5]均利用工程實例對比了組合后驗方差法、平均間隙法、分塊間隙法等在其上的優劣性,驗證了組合后驗方差法的實用性;陳剛等[6]分析了平均間隙法、T檢驗法、限差法在不同自由度的隧道沉降監測網中穩定性判別方法;劉冠蘭[7]將自動化監測中基準點的誤差看作為隨機信號,以最小二乘原理求解測站點自由設站問題對基準點進行統計檢驗以分析其穩定性。
國內對地鐵隧道全站儀自動化監測的基準點穩定性判斷方法大多為“內復核”,但在外部施工影響既有線變形監測中,常因基坑降水等導致實際變形區域大于監測區域,甚至涵蓋自動化監測的基準點布設區域,因此可能出現基準點布設區域與自動化監測區域發生同步變形,導致基準點穩定性分析失效。本研究基于工程實例,提出在地鐵隧道中全站儀自動化監測基準點向兩端挪移300m~500m以延申控制網布設范圍,將原有自動化監測基準點視為相對穩定的工作基點,并通過邊角后方交會和網平差對工作基點坐標進行復核以判斷工作基點的穩定性,同時根據廣州地鐵長期運營監測數據提出基準點布設區域選取原則,以供工程實踐參考。
1 全站儀自動化監測原理
全站儀自動化監測采用極坐標法觀測,儀器設置在變形區域中,將觀測后的自動化監測工作基點、監測點的坐標與初始觀測基準進行坐標轉換,各監測點通過坐標轉換后的差值關系計算變形量,極坐標法觀測原理如圖1及式⑴所示。

圖1 全站儀極坐標法觀測示意圖

每次觀測均通過設置在變形區域兩端的工作基點作為同名點進行坐標轉換,參數轉換則需要建立布爾莎七參數坐標轉換模型,即本次觀測與初始觀測之間存在三個平移參數、三個旋轉參數、一個尺度參數。觀測點Pi在兩個坐標系下的轉換關系如式⑵所示[8-9]。

2 地鐵隧道中全站儀自動化監測控制網建網
2.1 控制網基準點布設
全站儀自動化監測控制網建網借鑒高鐵CPⅢ控制網建網方式,采用自由設站后方交會的原理,通過對廣州地鐵長期運營監測數據分析及相關要求定出自動化監測基準點選取原則:
⑴控制網基準點應布設在變形區域兩端,且應遠離自動化變形區300m以外;
⑴基準點布設區域內運營監測點滿足一年內年沉降速率不超過0.01mm/d,且隧道累計沉降不小于-5mm或大于+3mm;
⑶該段隧道結構狀態良好,無外部施工、堆(卸)載等情況;
⑷控制網基準點應前后、上下交錯5~10m布置,且布設在可靠穩定且不易破壞的位置。
2.2 CPⅢ控制點布設
CPⅢ控制點布設在可靠穩定且不易破壞的位置,埋設于隧道側壁,為滿足控制網復測要求,控制網網點在《城市軌道交通工程測量規范》GB50308的基礎上加密布設,其縱向間距宜為40~60m,橫向間距為隧道結構寬度,左右對稱布設于隧道兩側。CPⅢ控制點建議采用強制對中的棱鏡預埋件,并利用大力士膠及固化劑將其鉆孔埋設于隧道側壁上,棱鏡預埋組件可自由拆卸、前后轉動棱鏡,其點位中誤差為0.4mm。見圖2。

圖2 插入圓棱鏡的CPⅢ控制點
2.3 自動化監測工作基點布設
自動化監測工作基點設置在自動化監測區域外側30~50m左右的位置,在保證儀器通視的情況下,沿隧道上下、前后交錯布設,一端宜設置3~4個工作基點,工作基點采用L型小棱鏡布設。見圖3。
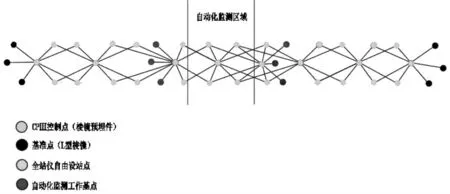
圖3 自動化監測控制網網型
3 地鐵隧道中全站儀自動化監測控制網穩定性分析
3.1 控制網測量及平差原理
對于自由設站邊角后方交會控制網平差,一般采用間接平差法,即以自由設站點坐標和待求點坐標作為未知數,以觀測的距離和方向列出誤差方程,經平差后求解未知參數,其誤差方程如式⑶所示[10]。

平差時對式⑶按最小二乘原理求出觀測值改正數,對得到的概略坐標加上改正數即為最后的平差結果,在本文控制網復測中,設置在兩端的6個基準點為已知點,CPⅢ控制點及自動化監測工作基點為待求點,第一個測站觀測3個基準點并進行后方交會求得測站點坐標后,通過極坐標法觀測得到CPⅢ控制點坐標,依次進行自由設站推算其他CPⅢ控制點及自動化監測工作基點坐標。
如圖3所示,全站儀自動化監測控制網為以基準點、CPⅢ控制點、自動化監測工作基點建立的自由設站邊角交會網,控制網復測采用間接平差原理,控制網測量及平差合格后將工作基點坐標與初始坐標進行對比,判斷其是否穩定,控制網復測及自動化監測工作基點穩定性判斷過程如圖4所示。

圖4 控制網復測及自動化監測工作基點穩定性判斷流程
3.2 工作基點穩定性分析判斷標準
當控制網復測合格即可通過工作基點兩期坐標差值對其穩定性作出判斷,主要方法采用《建筑變形測量規范》(JGJ8-2016)中限差法的判斷規定[11],當計算所有兩期高差值及兩期坐標差值均不大于按下列公式計算的限差時,可認為自動化監測設置的基準點穩定。

式中:δ為高差差值限差或位移差值限差,μ為對應精度等級的相鄰基準點高差中誤差或位移中誤差,η為觀測站數。
4 基于工程實例的控制網復測精度分析
以廣州地鐵3號線段自動化監測為例進行布網及復測分析,利用商業平差軟件COSA對自由設站點求解坐標改正數及點位中誤差,其數據如表1所示。

表1 自由設站點平差結果
對自動化監測工作基點GZJD1進行人為調整,再次進行復測檢驗GZJD1穩定性,檢驗統計見表2。
從表2中可以分析,各自由設站點坐標改正數較小,點位中誤差最大為0.62mm,均在1mm以內,結果表明在地鐵隧道中布設的自由設站邊角后方交會控制網精度可靠,通過人為調整GZJD1的位置再進行復測后發現可快速計算出GZJD1兩期位移差值為16.71mm,大于限差5.66mm,由此判斷GZJD1為動點。

表2 GZJ D1穩定性分析
5 結語
不同于常用的平均間隙法、限差法、統計檢驗法等內復核的穩定性分析方法,本研究提出全站儀自動化監測沿變形區域兩側延伸300~500m布設自由設站邊角后方交會控制網,用以判斷自動化監測工作基點的穩定性。該方法相對于其他穩定性分析方法具有工程實用性,通過復測合格后的工作基點坐標差值可以快速識別自動化監測工作基點是否穩定。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
工程與建設(2019年3期)2019-10-10 01:40:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52
河南科技(2014年5期)2014-02-27 14:08:32
