基于殘差時域注意力神經網絡的交通模式識別算法
2021-07-02 08:54:14劉世澤朱奕達陳潤澤羅海勇王寶會
計算機應用 2021年6期
劉世澤,朱奕達,陳潤澤,羅海勇,趙 方,孫 藝,王寶會
(1.北京航空航天大學軟件學院,北京 100191;2.北京郵電大學計算機學院(國家示范性軟件學院),北京 100876;3.中國科學院計算技術研究所,北京 100190)
(?通信作者電子郵箱yhluo@ict.ac.cn)
0 引言
隨著移動智能終端設備的飛速發展,智能手機已經逐漸成為人們日常生活中的必需品。搭載豐富內置傳感器的智能終端設備具備多維度感知用戶所處上下文環境信息的能力。近年來,通過捕獲用戶的上下文環境信息來感知用戶的行為模式[1-3]成為了普適計算中的研究熱點。用戶行為識別通常基于兩種數據源來完成,包括基于視覺信息的用戶行為識別和基于輕量級傳感器的用戶行為識別。基于視覺的方法需要外部系統捕捉圖像特征,對環境的要求較高并需要良好的光線條件。基于輕量級傳感器的方法不依賴基礎設施建設,具有較強的普適性。
交通模式識別是用戶行為識別中一個重要的檢測分支,其目的是識別用戶當前的交通模式,即對用戶所處的交通模式進行準確判斷。用戶在出行過程中常常使用不同的交通工具,在使用不同交通工具的過程中,常常會具有不同的出行需求。由于這些需求需要移動智能終端預先獲得用戶所處的交通工具狀態,即交通模式,交通模式識別問題是一個在多個領域起到至關重要作用的基礎問題,不同場景下基于精準的交通模式感知,才能夠提供圍繞用戶出行的一系列服務,如交通狀況預測[4-5]、用戶軌跡挖掘[3,6-7]、智能出行推薦[8]等。交通模式識別需要用戶隨身攜帶數據采集設備,基于視覺的方法進行交通模式檢測難以在實際應用場景進行部署,所以大部分的研究在圍繞交通模式識別問題上使用基于傳感器數據的方法[1,9-14]。交通模式識別在各行各業都有著較為豐富的應用需求:在外賣閃送等實際業務場景下,使用交通模式識別技術能夠幫助大數據平臺進一步精確識別訂單的配送情況,平臺對配送人員精確感知能夠避免訂單的異常配送狀態,例如配送人員提前完成訂單,平臺難以對延遲配送進行判定,配送人員在配送過程中出現特殊狀況,如交通事故、人身傷害等狀況,更加精確的交通模式感知能夠幫助保護平臺用戶的利益與配送人員的安全;在移動設備人機交互或移動地圖智能規劃的業務場景下,移動設備精準感知用戶的交通模式能夠幫助智能終端對用戶的出行模式進行智能規劃,向用戶提供更加人性化的出行建議與出行規劃;在用戶軌跡與交通狀況進行大數據分析的智慧城市業務場景下,大量用戶的實時交通模式數據可以進一步幫助城市進行交通狀況分析,及時規劃公共交通工具的智能調度,提高城市公共交通資源調度的科學性,避免交通資源的浪費以及緊缺。
考慮到不同交通模式下傳感器信號變化特點不同,文獻[2,15-18]等在基于傳感器數據的交通模式識別方法中人工提取多源傳感器信號特征。他們將提取的特征輸入到傳統機器學習算法中完成交通模式的預測,例如支持向量機[1,6]、決策樹[9,19-20]、集成學習[16-18,20]等。然而這些基于傳統機器學習算法的方法主要取決于手工提取特征的有效性,這既耗時又需要領域相關知識。
近年來,深度學習的研究引起了廣泛關注,由于深度學習不依賴特有的領域知識并具有從大規模原始數據中自動提取特征的能力。很多研究者[2,11-13]采用深度學習的方法來完成交通模式的預測。卷積神經網絡可以通過疊加幾個卷積運算自動創建抽象的層次結構特征。文獻[1,9,12]利用卷積神經網絡從加速度、陀螺儀、地磁等輕量級傳感器分別提取特征后進行分類。傳感器信號隨時間序列變化,時間序列神經網絡能夠合理地模擬時間序列問題中的時間依賴性。文獻[14,21]提出利用循環卷積網絡和長短期記憶遞歸神經網絡提取傳感器的時域特征進行交通模式識別。
但是現有交通模式識別方法中依舊存在不足:卷積神經網絡存在只能提取局部特征的問題,時間序列建模的循環神經網絡由于其模型結構復雜并且不能并行計算,存在模型參數量大、訓練時間長的問題;此外,沒有對分類特征進行特征重要性校準。為了解決以上問題,本文提出了殘差時域注意力神經網絡進行交通模式識別,能夠達到準確性與魯棒性的平衡,滿足了在對現代移動嵌入式設備友好的計算開銷下的實際交通模式識別性能需求。
1 相關工作
近幾十年來圍繞機器學習算法的創新與應用得到了巨大發展,并在普適計算領域得到充分應用。在交通模式識別領域,學者們利用機器學習算法提供了許多解決方案。近十年來隨著服務器計算能力的增強,使得深度學習算法快速發展,深度學習方法受到更多研究者的關注并為交通模式識別提供了新的解決方案。
1.1 基于移動傳感器數據的交通模式識別
在交通模式識別問題的研究中,研究者往往關注交通模式識別的準確性與實時性,交通模式識別的過程需要在模型的準確度與普適性之間達到一定的平衡。在移動傳感設備普及之前往往難以達到這樣的效果,然而隨著移動智能終端的逐漸普及,采集交通模式識別所需數據的硬件平臺已趨于成熟。交通模式識別問題目前存在基于不同數據源建立的解決方案,包括基于全球導航衛星系統(Global Navigation Satellite System,GNSS)的解決方案與基于低功耗傳感器的解決方案。近幾年來隨著低功耗傳感器在智能手機中的大量普及,采用低功耗傳感器數據的交通模式識別解決方案逐漸增多[1,2,15,22-24]。
1.2 基于機器學習算法的交通模式識別
在深度學習算法得到普遍應用之前,許多研究者提出多種基于傳統機器學習算法的交通模式識別解決方案,但由于機器學習算法需要研究人員手動提取特征,這些特征依賴于領域知識,所以在識別精度上存在較大提升空間。文獻[6]中提出了一種從GNSS 軌跡數據提取軌跡特征后,將特征送入到支持向量機分類器進行交通模式識別的方法,從而提供基于軌跡的交通模式分析。文獻[20]利用GNSS 數據提取衛星相關特征并基于貝葉斯網絡、決策樹、隨機森林、樸素貝葉斯以及多層感知機進行交通模式識別。
由于使用GNSS 傳感器采集數據會導致移動終端功耗變大,很多研究者開始研究基于低功耗傳感器數據進行交通模式識別。文獻[1]提出了一種軟硬件結合系統,通過搭建包含加速度傳感器、地磁傳感器以及陀螺儀的低功耗設備平臺采集數據后,從而提取少量統計學特征,利用支持向量機(Support Vector Machine,SVM)作為分類器進行交通模式識別。文獻[9]中利用智能手機中的加速度傳感器、陀螺儀以及磁力傳感器作為數據源,利用Filter 相關性度量(Correlationbased Feature Selection,CFS)算法對傳感器數據時域、頻域特征進行提取并采用分層的輕量級梯度提升器(Light Gradient Boosting Machine,LightGBM)算法對交通模式進行識別。文獻[17]通過集成分類器XGBoost(Extreme Gradient Boosting,極端梯度提升)與多層感知機的方式,基于加速度傳感器、陀螺儀、地磁傳感器以及氣壓傳感器數據提取統計學、頻域等特征進行交通模式識別。此外,還有研究人員利用高功耗GNSS數據和低功耗傳感器一起進行交通模式的感知。文獻[19]提出了采用Wi-Fi、藍牙、GNSS、加速度、重力加速度以及陀螺儀等傳感器提取用戶軌跡特征和時域特征并使用隨機森林算法進行交通模式識別。
1.3 基于深度學習算法的交通模式識別
隨著深度學習算法的快速發展,深度學習模型具備不需要領域知識即可自動提取特征的能力。在交通模式識別問題上,深度神經網絡也逐漸顯現出其重要價值。研究者逐漸受到深度學習模型的啟發,在交通模式識別問題上提出很多新解決方案。
卷積神經網絡在傳感器信號特征提取過程中起到了一定作用,不少研究者基于卷積神經網絡進行了交通模式識別問題上的探索。文獻[12]提出了擁抱網絡(EmbraceNet)來解決交通模式識別問題,對每個傳感器分別利用卷積神經網絡進行特征提取,在提取出的復雜時域與頻域信號特征中利用一種基于多項式分布權重構建的融合層對特征進行融合后完成分類。文獻[11]提出采用稠密網絡(DenseNet)[25]進行多個傳感器時域特征的提取,使用線性層進行特征融合來完成交通模式識別。
循環神經網絡在時域信號特征提取上具有鮮明的作用,基于傳感器數據的交通模式識別往往利用的是時間序列數據,許多研究者利用循環神經網絡以及其變體進行時域特征的進一步挖掘。文獻[10]提出將傳感器數據送入循環神經網絡進行時域特征提取,并利用提取出的時域特征進行分類預測。一些研究者[14,21]使用長短期記憶模型進行基于歷史信息的特征提取,長短期記憶模型是循環神經網絡的變體,引入了長期記憶與短期記憶機制,能夠更好地對時域信息中的長周期特征進行挖掘。此外,文獻[13]利用對抗自編碼器針對時域傳感器數據進行了交通模式識別。
然而上述工作一方面缺乏對時域特征的深層次挖掘,另一方面循環神經網絡在計算復雜度與內存占用上仍然存在較大提升空間,許多工作僅關注于提高模型的準確率而使用大量的計算資源進行交通模式識別,難以在移動智能終端進行部署與優化,隨著移動設備計算能力的不斷提高,移動設備已經達到部署深度學習或機器學習算法的能力,但高計算開銷也極大影響著實際模型端到端部署時實際運行的性能。此外,上述工作缺乏模型對細粒度特征的重校準能力,導致不同傳感器信號的特征空間難以進行融合并且難以體現具有更明顯交通模式特征的傳感器在實際識別過程中起到的重要性,也導致了部分傳感器特征的浪費。所以本文提出殘差時域注意力網絡以解決上述問題,本文模型能夠結合時域卷積網絡(Temporal Convolutional Network,TCN)的低計算開銷同時也更為關注重要的傳感器特征,避免了較低計算開銷要求下模型性能的損失,具有較好的魯棒性與穩定性。
2 殘差時域注意力交通模式識別模型
本文提出了一種基于殘差時域注意力神經網絡的交通模式識別模型,如圖1 所示,多源傳感器時間序列數據輸入到該模型后,該模型先利用殘差卷積神經網絡對不同感器進行局部感受野的特征提取。該模型在提取各傳感器局部特征后將其輸入到時域卷積神經網絡中進一步提取全局感受野的深層特征。此外,局部特征對于交通模式識別也有一定的必要性,為了保證模型能夠充分利用局部特征,本文借助殘差連接的方式傳遞淺層特征到模型的分類層,使時域卷積網絡能夠提高對重要特征進行感知的能力,而時域卷積網絡的膨脹卷積結構在提取局部細粒度特征時具有局限性也能得到彌補。由于不同傳感器特征對于交通模式識別的重要性不同,本文使用了一種基于特征通道間關系的注意力機制對模型提取的交通模式識別分類特征進行特征重校準,使卷積網絡能夠充分感知真正具有較高重要性的復雜高維特征,從而降低了神經網絡在識別過程中對無效高維特征進行大量計算導致的計算開銷浪費問題,便于算法模型控制其算子規模,同時也提高了計算模型的魯棒性,達到了計算效率與計算性能的平衡。
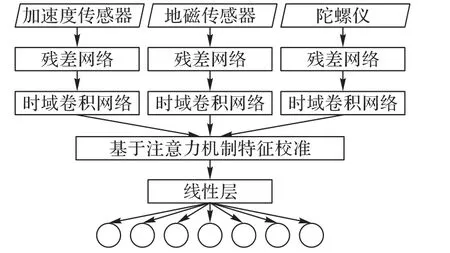
圖1 本文模型結構示意圖Fig.1 Schematic diagram of proposed model structure
2.1 基于注意力機制的殘差卷積神經網絡
深度神經網絡是由多個非線性處理層堆疊而成的模型,卷積神經網絡作為神經網絡的一種,在提取小范圍局部特征方面優勢明顯。但是隨著網絡層數的增加,梯度消失或梯度爆炸問題的出現導致深度神經網絡在訓練時難以收斂。殘差卷積神經網絡廣泛應用于解決隨著模型加深導致的梯度消失或梯度爆炸的問題,它使用的捷徑連接將輸入特征添加到輸出特征上,從而提高淺層網絡特征的流動性。殘差連接能夠確保模型中保持初始特征的恒等映射,在較深卷積網絡之中依然能夠保留原始特征,從而能夠幫助模型在細粒度特征挖掘過程中獲得更佳效果。針對時間序列傳感器數據的交通模式識別,局部特征能夠捕獲交通模式在極小時間窗口內的變化規律,比如汽車突然的加速或者剎車、跑步中的擺臂等。本文提出的模型利用殘差卷積神經網絡對不同的傳感器原始觀測值進行局部特征的提取。
本文使用的殘差神經網絡由多個殘差單元組合堆疊而成,本文使用的殘差神經網絡的框架如圖2 所示。給定輸入數據,首先模型將輸入的傳感器數據經過卷積層、批處理標準化層和指數縮放線性單元(Scaled Exponential Linear Unit,SELU)處理之后,將處理得到的特征送入多個殘差單元中進行處理,將最后一個殘差單元中得到的局部特征經過批處理標準化層和池化層后送入到時域卷積網絡模型中進行細粒度全局特征提取。
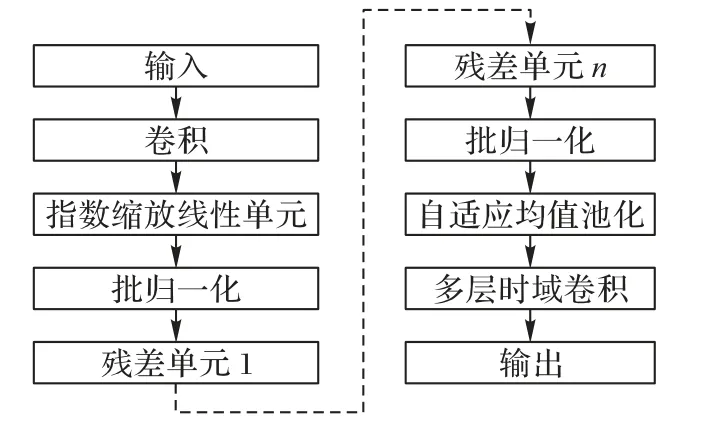
圖2 殘差網絡結構示意圖Fig.2 Schematic diagram of ResNet structure
每個殘差單元由卷積、批歸一化和SELU 堆疊而成。圖3展示了本文采用殘差單元的示意圖,其中第l個殘差單元的輸入為xl,則其輸出可形式化為執行式(1)中的數學計算。
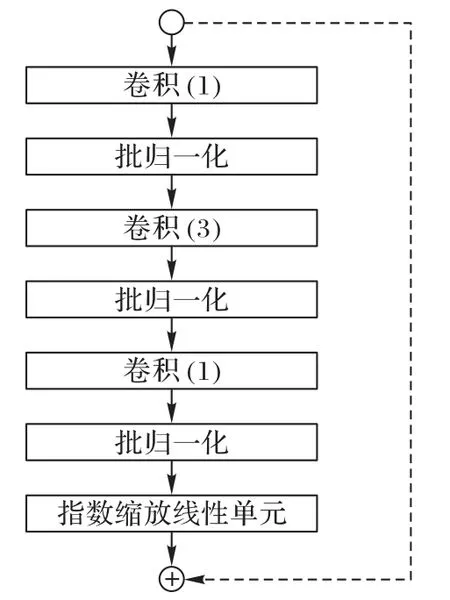
圖3 殘差單元示意圖Fig.3 Schematic diagram of residual unit

其中:F(xl,Wl)為殘差函數,Wl為該殘差函數的對應權重參數;f(·)為非線性激活函數SELU;WS為瓶頸層的權重參數,瓶頸層能夠保證輸入特征和輸出特征的通道數一致。殘差單元塊中殘差函數F(·)形式靈活可變,能夠堆疊多個卷積層。
2.2 時域卷積網絡
殘差神經網絡只針對單一傳感器進行了局部的特征感知,單一傳感器包括加速度、重力加速度以及地磁傳感器提供的高維特征空間,只具有模型對單一環境上下文的局部感知,僅僅關注于用戶的姿態、用戶環境的磁場變化等單一變化,不同環境上下文之間的相互關聯關系等隱藏特征仍需要進一步進行挖掘,因此本文引入了時域卷積網絡來進行粗粒度的時序挖掘,同時也對不同傳感器之間進行了粗粒度的融合感知。
循環神經網絡具有較強的提取時序特征能力,其分支例如長短期記憶與門控循環神經網絡進一步改進了循環神經網絡的時序記憶范圍,將較早的時序數據也能夠充分利用起來。然而循環神經網絡也具有一些顯著的弱點,例如循環神經網絡由于運算時依賴上下文輸入的特征,需要進行密集計算導致模型引入大量的計算參數;其次,循環神經網絡內存占用也較高,難以大規模并行處理。
針對以上問題,研究者提出了時域卷積網絡[26],時域卷積網絡在較長的時間序列中占用較低的計算開銷便可以充分挖掘全局特征,從而達到了理想的特征提取效果。本文提出的模型中使用時域卷積網絡提取長時間窗口下交通模式的全局特征。時域卷積網絡可以接收任意長度的時間序列數據,并將其映射成任意長度的輸出特征向量。本文模型中時域卷積網絡的輸入是由殘差網絡輸出的傳感器局部特征,然后利用時域卷積網絡通過結構上的因果關系卷積充分挖掘時間序列上局部特征之間的潛在關系,從而保證在長時間序列下模型提取細粒度的全局特征。
本文提出的模型中的時域卷積網絡由多個膨脹卷積塊堆疊組成。膨脹卷積塊是卷積神經網絡的一個變種,雖然卷積神經網絡能夠對固定時間窗口的特征數據進行時序特征挖掘,但是由于傳感器特征窗口本身即為連續的離散時間序列,通過卷積操作僅能夠抽取在卷積核范圍內的短期歷史特征。為了能夠在不改變卷積核大小的前提下擴大卷積核感受野,本文使用了膨脹卷積。對于一個特征窗口X∈Rn上第s個位置進行卷積操作f:{0,1,…,k-1}→R,則膨脹卷積為:

其中,d為膨脹系數,而xs-d·i即為時間窗口中s位置之前的前序位置。在多層膨脹卷積結構中,第i層的膨脹系數設置為di=2i-1。通過膨脹卷積,能夠增大卷積核感受野范圍,增強了模型對歷史信息感知能力。通過增加膨脹卷積網絡的深度,能夠進一步加強膨脹卷積層對交通模式中歷史信息更長時間尺度上的感知能力。在每次膨脹卷積之后本文引入批歸一化和SELU 進行特征非線性變化。對于傳統時序模型某一時刻的計算需依賴于上一層的計算結束,但是在時域卷積模型中由于共享卷積核的參與,可以保證模型能夠進行并行計算。此外,傳統時間序列神經網絡在使用時需要將每個時間步的信息都保存下來,從而占據大量內存,本文模型在每一層膨脹卷積中共享卷積核,內存占用更低。一個多層膨脹卷積塊的操作過程如圖4所示。
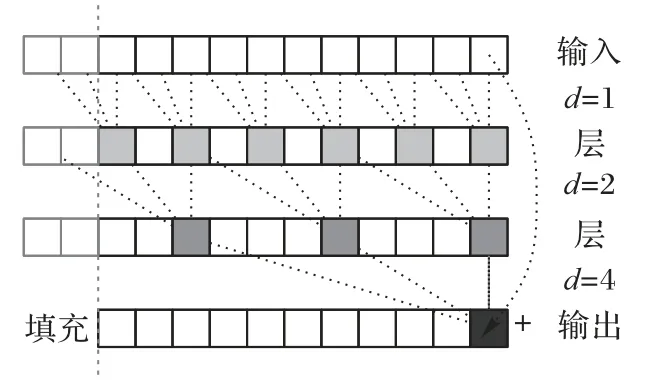
圖4 多層膨脹卷積結構示意圖Fig.4 Schematic diagram of multi-layer dilated convolution structure
多層膨脹卷積塊是本文提出的模型中時域卷積網絡的基本結構,多層膨脹卷積的輸出特征與輸入特征具有相同的特征序列尺寸。為了避免訓練過程中隨著模型加深導致梯度消失的問題以及提高特征的流動性,本文模型在每個多層膨脹卷積塊的輸出層還加入了捷徑連接,即將多層膨脹卷積塊的輸入特征與輸出特征進行按位相加。在膨脹卷積塊計算得到最終的輸出特征之后,本文使用池化層對輸出特征維度進行壓縮并將壓縮后的特征輸入到下一個膨脹卷積塊中。
2.3 特征重校準
在上述兩種計算單元間進行特征傳遞的過程中,不同傳感器特征從不同角度體現時間序列數據在交通模式上的變化規律,然而并非所有的特征都對交通模式分類任務起到相同作用。本文提出的模型在使用多維特征進行分類時考慮到不同特征之間的差異性,因此該模型引入收縮-激勵注意力機制(Squeeze-Excitation)[27]對分類特征進行重校準,從而提高了交通模式的魯棒性。特征重校準平衡了不同傳感器特征空間中,由于單一傳感器數據之間的差異性導致的特征空間差異性,在注意力機制的作用下,不同傳感器通道之間得到了再次平衡,避免了機械地對異傳感器間進行合并導致的統計差別針對不同特征通道的再平衡,充分發掘具有強重要性的特征通道能夠在整個計算模型中發揮其代表性。
當不同傳感器特征經由模型運算得到輸出特征Wl+1后,本文利用式(3)~(5)進行基于通道間注意力機制的特征重校準。首先每個通道的特征經過全局壓縮及拼接得到dc,然后通過使用Sigmoid 激活函數σ和SELU 激活函數δ的門控機制對壓縮得到的通道指示器dc進行特征重要性的自動學習,最后將得到的通道特征放縮因子s對原始特征進行激勵。
在對不同傳感器特征通道進行重校準后,對交通模式識別更有幫助的傳感器特征將被增強,不同交通模式下區分度較低的特征將被抑制,從而提高本文模型的識別準確性。
3 實驗與結果分析
3.1 實驗數據處理
本文采用數據豐富度較高的宏達通訊(data-rich High Technology Computer,HTC)提出的交通模式識別數據集[18]進行實驗,該數據集將交通模式劃分為站立、行走、跑步、自行車、摩托車、轎車、公交以及軌道交通共8 種類別。在實驗過程中,本文隨機抽取數據集中70%的部分作為訓練集,30%的部分作為測試集。本文將使用6 種具有代表性的模型與本文提出模型進行對比驗證本文模型的有效性與必要性,包括HTC 數據集 提出的基于SVM 的基準模型[1]、基 于CFS 的LightGBM 模型[9]、基于集成LightGBM 與多層感知機的分類器模型[17]、一維DenseNet 模型[11]、EmbraceNet 模型[12]以及雙向LSTM 模型[21]。在比較各個方法的性能過程中,針對HTC 數據集的原始數據格式,本文運用相同的處理方式以及劃分方式進行對比,避免了數據處理過程中引入的人為誤差影響實驗過程的可靠性。
HTC 數據集中包含的傳感器類型有加速度、地磁與陀螺儀,現有工作中采用其他傳感器的算法將會針對該數據集進行重新適配。HTC 數據集中傳感器的每個樣本分別為形如(x,y,z)的傳感器數據三元組,為了豐富傳感器原始觀測數據,本文使用式(6)~(9)對每個傳感器再提取了4 種分量,最終構成傳感器數據七元組(x,y,z,f,h,i,d)。

其中:式(6)計算了傳感器向量的總強度f;式(7)計算了總強度f在水平面上的投影,即水平強度h;式(8)計算了總強度d與水平面的夾角,即傾角i;式(9)計算了水平強度偏離北向的角度,即偏角d。提取上述分量后能夠進一步提取傳感器的物理特性,從而便于神經網絡挖掘深層次特征。
用戶乘坐交通模式下采集到的傳感器數據在時間上具有連續性。在HTC交通模式識別數據集中,本文使用時長為5 s的時間窗口構建一個樣本。本文對不同傳感器數據在時間窗口內進行下采樣來保證不同傳感器數據長度一致。本文抽取了部分交通模式下某一時間窗口內傳感器的總強度變化表現,如圖5所示。
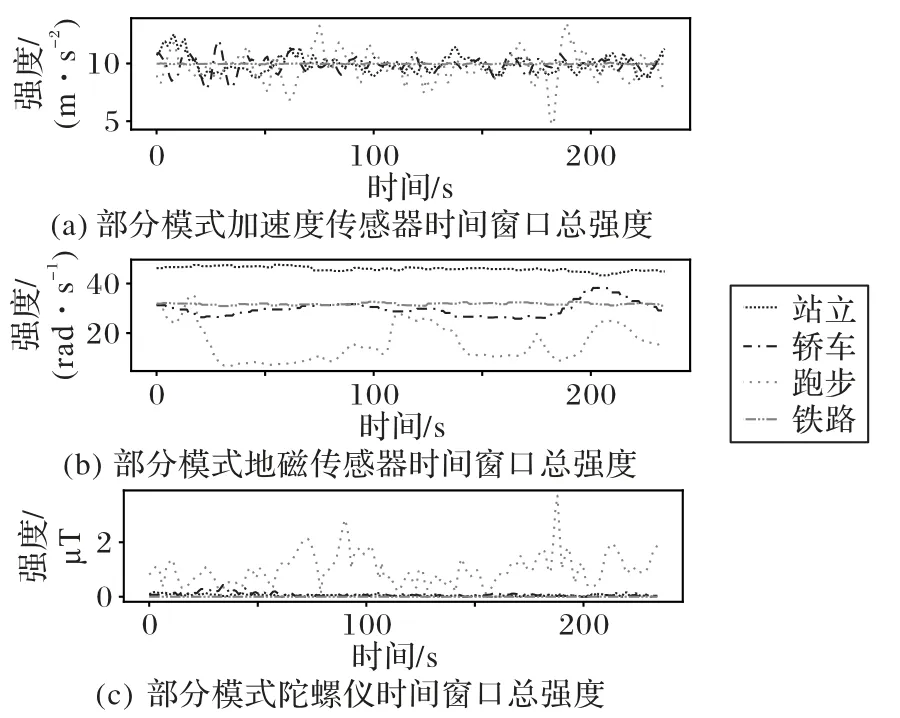
圖5 部分交通模式的傳感器總強度變化示意圖Fig.5 Schematic diagram of total sensor intensity changes of some traffic modes
從傳感器數值的總強度變化可見不同交通模式下具有明顯不同信號變化趨勢。圖5(a)體現出用戶在跑步過程中加速度總強度變化幅度較為明顯,同樣在圖5(c)中用戶在跑步過程中陀螺儀變化也較為明顯。此外,在行駛狀態變化較為明顯的轎車交通模式中,如圖5(a)所示加速度變化也較為明顯。由上述例子可見在不同交通模式下,通過對傳感器信號進行時序特征挖掘,使模型具有達到區分不同交通模式的潛力。
3.2 模型訓練
在模型訓練過程中,為了解決模型受傳感器特征不同量綱的影響導致梯度收斂過慢甚至難以收斂的問題,本文對原始傳感器數據進行了健壯歸一化(Robust Normalization),對單一傳感器數據X的健壯歸一化過程如式(10)所示:
其中,Q1、Q3分別代表上四分位數和下四分位數。健壯歸一化能夠確保歸一化過程中傳感器特征不受異常噪聲的影響,將歸一化范圍確定在大多數正常信號范圍內。
本文在訓練殘差時域注意力網絡的過程中使用自適應均方根梯度(Adaptive Mean Square Gradient,AMSGrad)[28]作為模型的優化器,起始學習率設為0.000 1。將訓練數據按每批128 個樣本訓練200 輪。本文提出的模型采用4 個殘差單元堆疊構建的殘差神經網絡提取每個傳感器128 個通道的特征,此外,本文提出的模型利用3 層膨脹卷積塊堆疊的時域卷積網絡對每個傳感器提取256個通道的全局特征。
本文模型訓練目的是不斷優化模型參數,并降低模型輸出的軟標簽與實際交通模式標簽之間的誤差,詳見式(13),為本文模型輸出的預測結果,該結果與樣本所屬真實類別計算交叉熵作為模型損失函數。

3.3 總體分類性能對比
在實驗過程中,本文以準確率作為主要模型評價指標,同時引入每種交通模式下的召回率與準確率來進一步分析模型的識別性能。在使用HTC 交通模式數據集進行實驗過程中,本文選取已有的具有代表性的交通模式識別方法作為基準,其中準確率對比實驗結果如表1 所示。可以看出,本文提出的殘差時域注意力網絡能夠在測試集上達到96.07%的準確率,而其他基準模型中只有文獻[11]模型,文獻[12]模型能夠達到高于90%的準確率。本文提出的模型在HTC 數據集下的識別準確率均高于其他基準算法。為了進一步深入分析各個交通模式的識別情況,本文對上述算法的召回率與精確率進行了對比,并分析不同交通模式在模型識別中的難易程度。
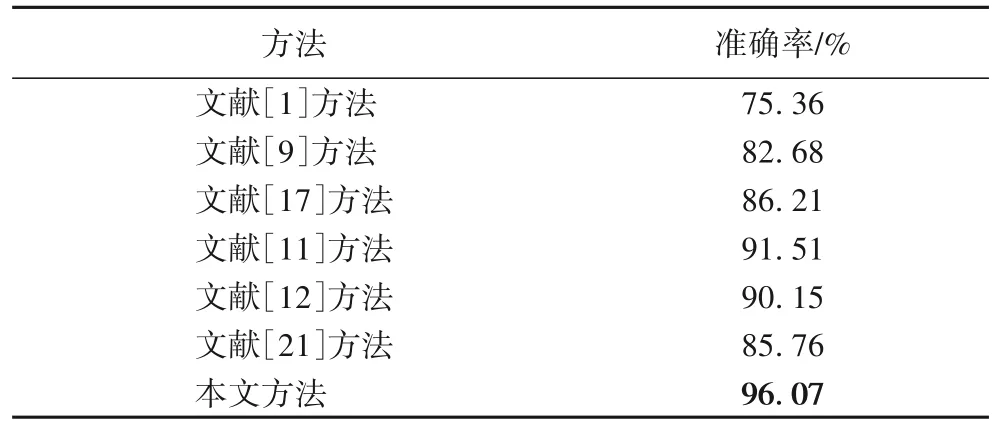
表1 不同交通模式識別算法的識別準確率對比Tab.1 Recognition accuracy comparison of different traffic mode recognition algorithms
3.4 單一交通模式識別性能對比
由表2與表3可見,對所有基準算法和本文提出的模型分別在不同交通模式下的召回率與精確率進行了計算。召回率與精確率計算方式如式(14)與式(15)所示:
其中:c代表某一類交通模式,而Xc指所有交通模式c下的樣本;TP(True Positive)、FP(False Positive)、FN(False Negative)與TN(True Negative)分別指在樣本真實情況正例預測結果為正例、真實情況負例預測結果為正例、真實情況正例預測結果為負例,以及真實情況負例預測結果為負例的個數。
召回率可以計算出在交通模式c下,模型能夠在所有該類別樣本中正確識別該交通模式的比例,而精確率可以計算出分類方法在預測結果中能夠準確預測交通模式c的比例。從表2 中的數據可分析出,在所有交通模式識別算法中摩托車與公交車兩種交通模式與其他交通模式相比在測試集中的召回率較差。由表3 可見,摩托車與自行車兩種交通模式在查準結果中能夠符合真實交通模式的比例普遍較低,而站立、行走以及跑步這類與用戶姿態變化相關的交通模式往往更容易識別。其中文獻[1]中SVM 分類器能夠在公交車交通模式上達到較高的精確率,但該模型的召回率過低,上述情況也表明了公交車交通模式在該算法上難以在實際情況中得到準確的識別,同理這個現象也出現在其他交通模式識別基準模型中,但要優于SVM 分類器。本文提出的方法在識別公交車交通模式時相較基準模型在各個指標上都有所提升,但召回率也低于精確率,這也體現出準確識別公交車交通模式具有一定的挑戰,傳統方法將實際的公交車模式大量誤判為其他交通模式,僅僅能夠區分出部分情況下的公交車模式。此外,本文提出的模型能夠在摩托車、自行車等在其他基準模型中較難區分的交通模式中得到較高精確率與召回率。
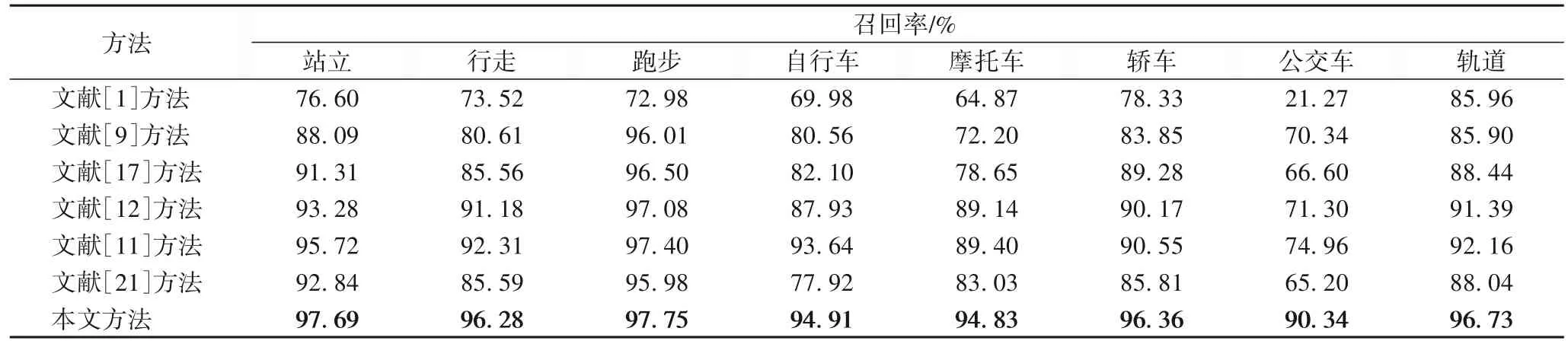
表2 不同識別算法的識別召回率對比Tab.2 Recognition recall comparison of different classification algorithms
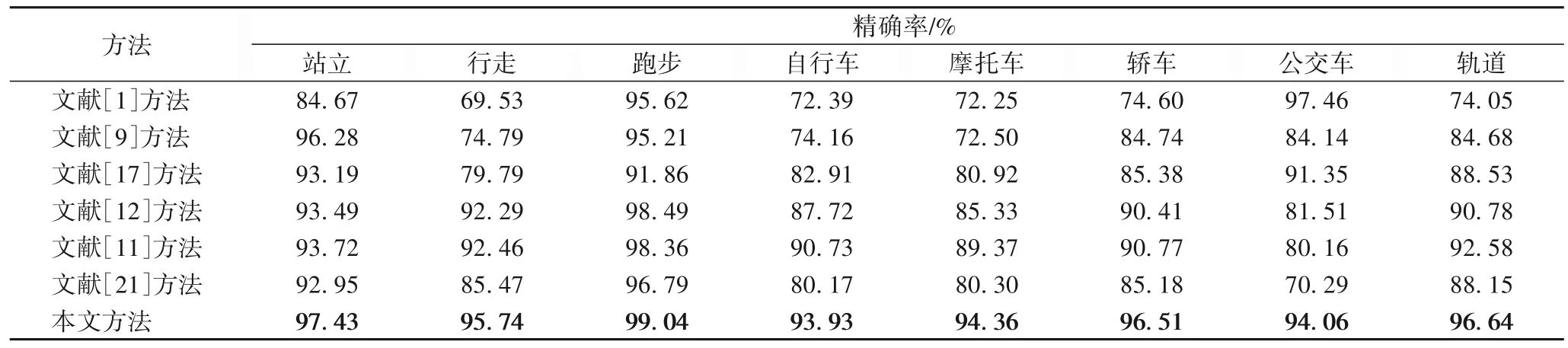
表3 不同識別算法的識別精確率對比Tab.3 Recognition precision comparison of different classification algorithms
綜合表2~3 可以分析出,本文提出的模型在多種交通模式下召回率與精確率相差較小,也表明本文模型在識別其他交通模式下具有較高魯棒性。
本文還在HTC 數據集下對本文提出的模型計算了混淆矩陣,如表4 所示。從表4 中可以看出,本文提出的模型將部分屬于公交車交通模式類別的樣本識別為軌道交通模式和轎車交通模式。這幾種交通模式具有一定的相似性且用戶在這幾種交通模式下運動姿態變化相對較小,運動狀態較為穩定,當用戶姿態變化較大時比如跑步、行走等模式下模型能夠達到較好識別效果。
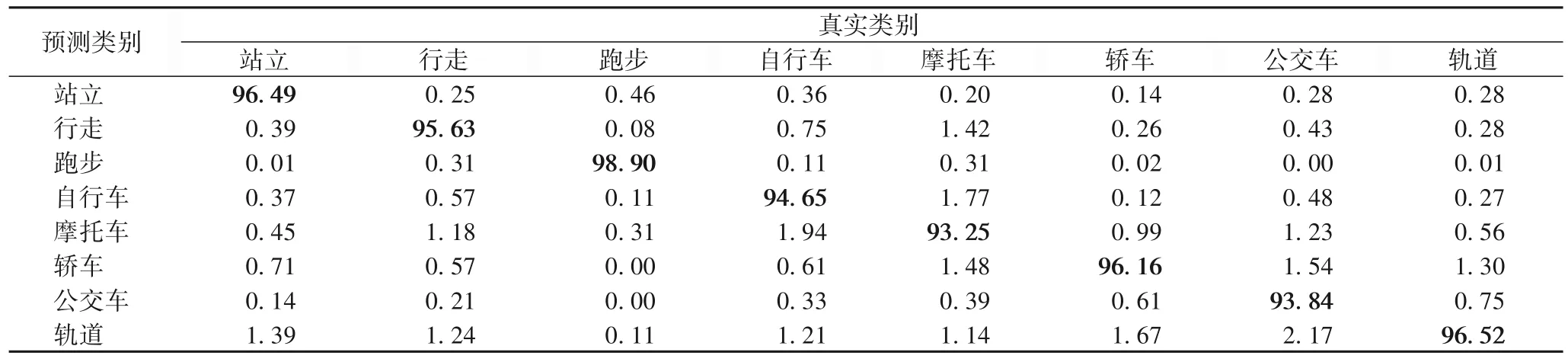
表4 殘差時域注意力模型識別效果混淆矩陣 單位:%Tab.4 Confusion matrix of recognition results by residual temporal attention network unit:%
3.5 消融實驗
本文提出的殘差時域注意力模型在交通模式識別過程中分別針對不同時間尺度下進行了時序特征挖掘,該模型分別使用殘差網絡與時域卷積網絡對短期時序特征與長期時序特征進行特征提取。本文首先通過消融實驗對本文提出的交通模式識別模型中上述兩個模塊的影響進行了評估,其次本文提出的模型對殘差網絡與時域卷積網絡提取的特征進行基于通道的注意力機制特征校準進行了分析。基于上述模型消融實驗設計所得到的實驗結果如表5所示。
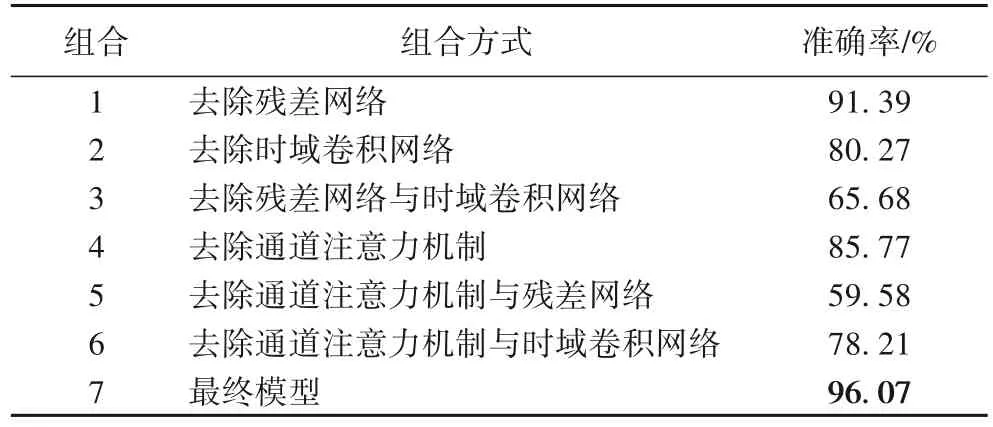
表5 本文模型消融實驗準確率對比Tab.5 Accuracy comparison of proposed model in ablation experiments
由表5 可見,本文提出的模型在缺少殘差網絡提取的短期時序特征時,模型在識別準確率上下降較少,但當模型缺少時域卷積網絡提取的長期時序特征時,模型在識別準確率上下降較大。這也說明了全局特征在本文模型中對交通模式識別起到了更為重要的影響。當本文模型只利用傳統的卷積網絡進行特征提取時,該模型在測試集上的識別精度下降明顯,只有65.68%的識別準確率,這表明殘差網絡和時域卷積網絡在本文模型中對交通模式識別所提取的特征是十分有效的。本文模型包含針對傳感器的殘差網絡、通道注意力機制以及針對特征空間的時域卷積網絡,而當本文模型移除了基于注意力機制的特征重校準之后,模型精度從96.07%下降到85.77%,這表明模型的特征重校準模塊有效地篩選出了交通模式識別中的重要特征,并幫助提高了模型識別的魯棒性。從表5 中可以發現,本文所提出模型中各個模塊均會對交通模式識別起到重要幫助作用。
由此可見,殘差網絡提供的細粒度感知能力在模型中起到重要作用。組合7 相較于組合1 提高了4.68 個百分點,而相較于組合5 可以對比得出,綜合通道注意力機制與殘差網絡的表現,僅僅使用時域卷積網絡的組合5 效果最差。通道注意力機制與殘差網絡均能夠使整個模型對多源傳感器的特征通道再平衡,但殘差網絡難以對不同通道特征進行通道級別的重新校準,只能通過卷積操作的細粒度權重進行簡單平衡。只有通道注意力機制與殘差網絡配合起來分別在特征尺度與通道尺度進行重校準與特征提取,模型性能能夠得到較大的提升,而任一部分缺失都能夠極大影響模型總體的性能。其次,由組合2 也可以得出,缺失粗粒度時域特征感知能力的模型效果也難以達到理想水平,時域卷積網絡在模型中起到了至關重要的作用。
3.6 算法計算開銷對比
本文針對上述不同分類器算法進行了運算時間開銷與空間占用的分析與對比。其中,針對基于傳統機器學習算法的分類器方法,本文將針對原始數據中驗證集部分進行特征工程處理的空間與時間開銷也計入算法的時間與空間開銷中。對于不同方法,本文通過統計分類器方法在驗證集部分數據上花費的時間作為時間開銷的指標,通過統計在驗證集部分數據上花費的最大內存與顯存占用值作為內存占用的指標,從而對不同方法進行針對計算開銷的比較,詳細計算開銷對比如表6所示。
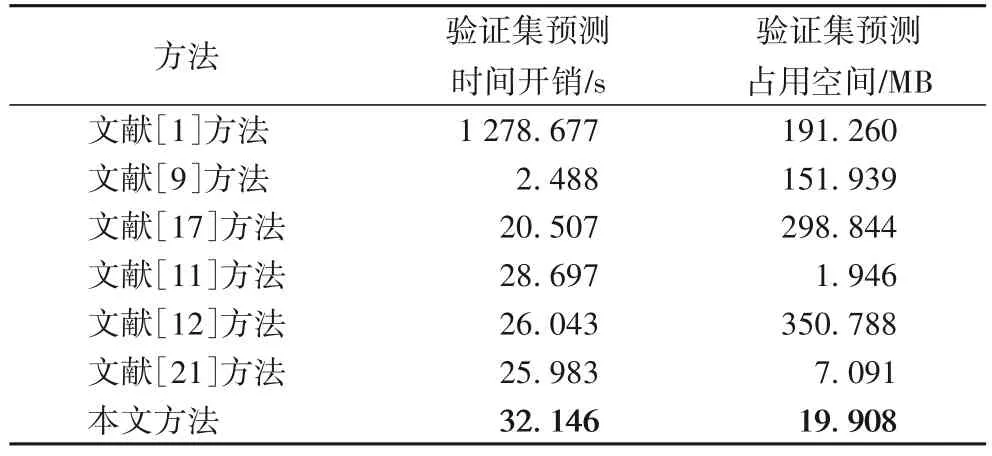
表6 不同交通模式識別算法的計算開銷對比Tab.6 Comparison of computational overhead for different traffic mode recognition algorithms
由計算開銷對比可以看出,本文算法在時間開銷與空間開銷上能夠達到相對較低的占用。由本文提出算法的時間與空間開銷測試結果可見,在計算開銷與算法精度上本文算法能夠達到較好的平衡。
4 結語
本文基于加速度、地磁以及陀螺儀等低功耗傳感器數據提出了殘差時域注意力模型進行用戶所處交通模式的識別。該模型通過引入殘差網絡與時域卷積網絡進行不同感受野的時序特征挖掘,并使用基于通道的注意力機制對傳感器特征進行特征重校準,使得該模型在不同交通模式下獲得更高的檢測魯棒性。本文所提算法在HTC 交通模式數據集上取得了良好效果,達到了96.07%的準確率,遠高于其他現有基準算法。但本文算法仍有提升識別準確度的空間,同時隨著移動智能終端的發展成熟,移動設備也具有適配該算法的潛力。未來將克服目前局限,進一步提升該交通模式識別算法性能,擴展交通模式識別算法新應用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
電子測試(2017年23期)2017-04-04 05:06:50
智能系統學報(2017年5期)2017-01-22 11:21:30
光學精密工程(2016年6期)2016-11-07 09:07:19
智能系統學報(2015年3期)2015-01-29 15:20:12
